当前位置:网站首页>Understand the key technology of AGV -- the difference between laser slam and visual slam
Understand the key technology of AGV -- the difference between laser slam and visual slam
2022-07-02 16:20:00 【Xiaobai learns vision】
Click on the above “ Xiaobai studies vision ”, Optional plus " Star standard " or “ Roof placement ”
Heavy dry goods , First time delivery Mobile robots (AGV) It's a kind of industrial robot . It is controlled by a computer , With move 、 Automatic pilot 、 Multi sensor control 、 Network interaction and other functions , The most important use in actual production is carrying , It can be said that as long as there is a need for transportation , It's possible to use mobile robots .

In recent years , Mobile robot technology has developed rapidly all over the world . People are committed to applying mobile robots to various scenes , Carry robots indoors and outdoors , To service robot , Then to industrial robots , The application of mobile robots has made great breakthroughs .
One of the key technologies in mobile robot research is real-time location and mapping , It's called SLAM technology .SLAM It tries to solve such a problem : A robot moving in an unknown environment , How to determine its own trajectory by observing the environment , At the same time, build a map of the environment .
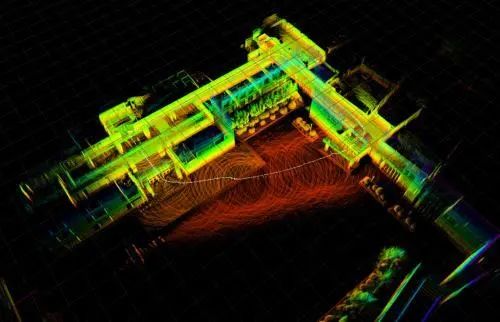
SLAM Technology is the sum of many technologies involved in achieving this goal . Because of its important theoretical and practical value , It is considered by many scholars that it is the key to realize truly autonomous mobile robot .

Distinguish according to the core functional modules , Currently common mobile robots SLAM The system generally has two forms : Based on lidar SLAM( laser SLAM) And vision based SLAM(Visual SLAM or VSLAM).
So laser SLAM And vision SLAM What's the difference ? You can see it at a glance by looking at the table below ~
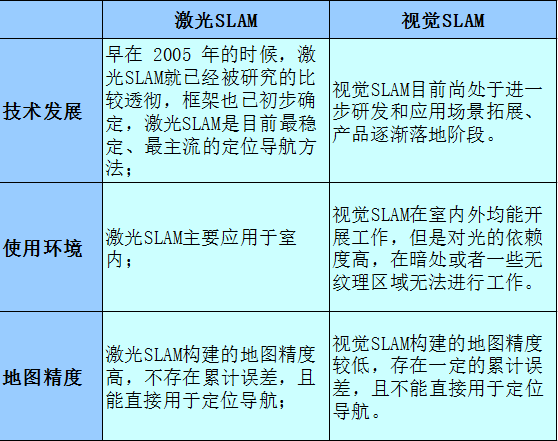
laser SLAM And vision SLAM Compare
By contrast, we find that , laser SLAM And vision SLAM Each is good at winning . Compare the two , laser SLAM The constructed map has high accuracy , There is no cumulative error , And it can be directly used for positioning and navigation .

Of course , laser SLAM There are some limitations . For example, in the long and straight 、 On both sides are long corridors of walls or in an environment with large dynamic changes , Rely solely on lasers SLAM It is easy to lose location .
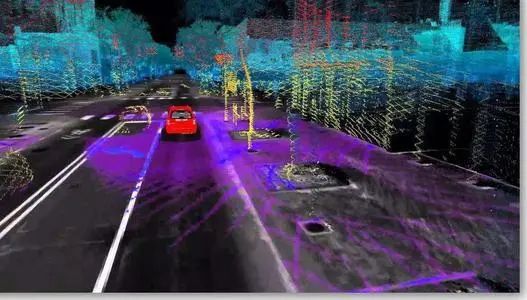
Actually , To make mobile robots cope with various complex use scenarios , laser SLAM And vision SLAM It will develop in mutual competition and integration , Multisensor fusion navigation is bound to be the future development direction . With the solution of the core technology of mobile robot , Will replace manual completion simple 、 repeat 、 A heavy workload , To really serve humanity .

The good news !
Xiaobai learns visual knowledge about the planet
Open to the outside world

download 1:OpenCV-Contrib Chinese version of extension module
stay 「 Xiaobai studies vision 」 Official account back office reply : Extension module Chinese course , You can download the first copy of the whole network OpenCV Extension module tutorial Chinese version , Cover expansion module installation 、SFM Algorithm 、 Stereo vision 、 Target tracking 、 Biological vision 、 Super resolution processing and other more than 20 chapters .
download 2:Python Visual combat project 52 speak
stay 「 Xiaobai studies vision 」 Official account back office reply :Python Visual combat project , You can download, including image segmentation 、 Mask detection 、 Lane line detection 、 Vehicle count 、 Add Eyeliner 、 License plate recognition 、 Character recognition 、 Emotional tests 、 Text content extraction 、 Face recognition, etc 31 A visual combat project , Help fast school computer vision .
download 3:OpenCV Actual project 20 speak
stay 「 Xiaobai studies vision 」 Official account back office reply :OpenCV Actual project 20 speak , You can download the 20 Based on OpenCV Realization 20 A real project , Realization OpenCV Learn advanced .
Communication group
Welcome to join the official account reader group to communicate with your colleagues , There are SLAM、 3 d visual 、 sensor 、 Autopilot 、 Computational photography 、 testing 、 Division 、 distinguish 、 Medical imaging 、GAN、 Wechat groups such as algorithm competition ( It will be subdivided gradually in the future ), Please scan the following micro signal clustering , remarks :” nickname + School / company + Research direction “, for example :” Zhang San + Shanghai Jiaotong University + Vision SLAM“. Please note... According to the format , Otherwise, it will not pass . After successful addition, they will be invited to relevant wechat groups according to the research direction . Please do not send ads in the group , Or you'll be invited out , Thanks for your understanding ~边栏推荐
- 忆当年高考|成为程序员的你,后悔了吗?
- 2022 the latest and most detailed will successfully set the background image in vscade and solve unsupported problems at the same time
- [5g NR] RRC connection release
- OSPF - route aggregation [(summary) including configuration commands] | address summary calculation method - detailed explanation
- 华为云服务器安装mysqlb for mysqld.service failed because the control process exited with error code.See “sys
- Invalid bound statement (not found) solution summary
- Text intelligent expansion and contraction control of swiftui text component (tutorial includes source code)
- 纪念成为首个 DAYU200 三方 demo 贡献者
- Aujourd'hui dans l'histoire: Alipay lance le paiement par code à barres; La naissance du père du système de partage du temps; La première publicité télévisée au monde...
- Today in history: Alipay launched barcode payment; The father of time-sharing system was born; The first TV advertisement in the world
猜你喜欢

The sea of stars hidden behind the nebula graph

微信v3native支付设置的结束时间处理办法

Recalling the college entrance examination and becoming a programmer, do you regret it?
Today in history: Alipay launched barcode payment; The father of time-sharing system was born; The first TV advertisement in the world
win10系统升级一段时间后,内存占用过高

sim2real环境配置教程

关于mysql安装的一些问题
Vscode设置标签页多行显示

Practice of traffic recording and playback in vivo

Pandora IOT development board learning (RT thread) - Experiment 2 RGB LED experiment (learning notes)
随机推荐
HMS core machine learning service helps zaful users to shop conveniently
Crawl the information of national colleges and universities in 1 minute and make it into a large screen for visualization!
PyC file decompile
[fluent] dart data type number type (DART file creation | num type | int type | double type | num related API)
Today in history: Alipay launched barcode payment; The father of time-sharing system was born; The first TV advertisement in the world
Vscode设置标签页多行显示
仙人掌之歌——投石问路(3)
外企高管、连续创业者、瑜伽和滑雪高手,持续迭代重构的程序人生
Leetcode --- longest public prefix
手机app通达信添加自定义公式(分时T+0)为例子讲解
Maui学习之路(三)--Winui3深入探讨
Dimension table and fact table in data warehouse
Various entanglements between qvariant and Jason -- QT
How to use stustr function in Oracle view
Boot 中bean配置覆盖
SSM整合-异常处理器及项目异常处理方案
End time processing method of wechat v3native payment settings
In memory of becoming the first dayu200 tripartite demo contributor
Boot transaction usage
理想之光不灭