当前位置:网站首页>matlab simulink 粒子群优化模糊pid控制的电机泵
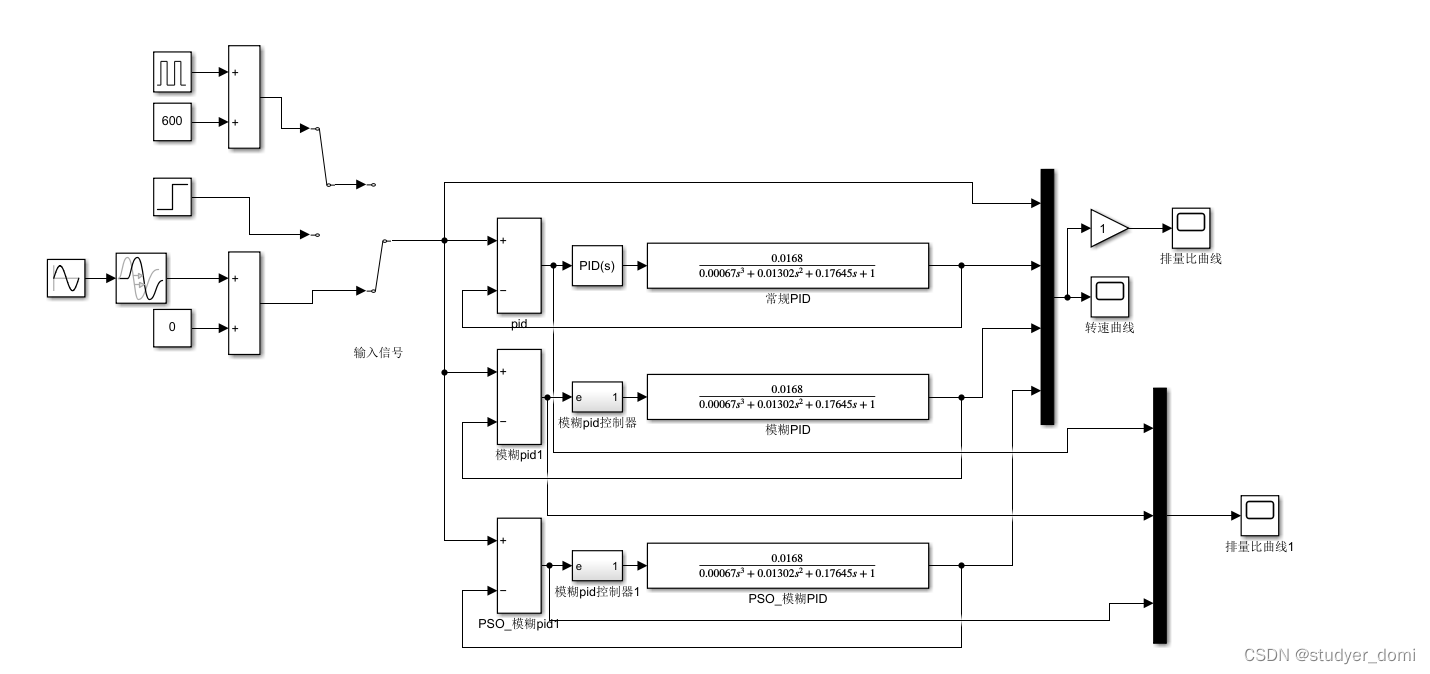
matlab simulink 粒子群优化模糊pid控制的电机泵
2022-08-01 05:25:00 【studyer_domi】
1、内容简介
略
463-可以交流、咨询、答疑
2、内容说明
(1)阶跃跟踪仿真
设定马达期望转速在1s时由 0 阶跃至 750r/min,模糊PID 仿真结果如图1所示,改进模糊PID仿真曲线如图2所示。图中1为马达的目标转速,2为马达转速的仿真曲线。
(2)方波跟踪仿真
设定马达期望转速为750r/min 的方波,周期是1s,最小值是 600r/min,最大值是 900r/min。模糊PID 仿真结果如图3所示,改进模糊PID仿真曲线如图4所示。图中1为马达的目标转速,2为马达转速的仿真曲线。
(3)正弦跟踪仿真
设定马达目标转速为750r/min的正弦波,最小值是 600r/min,最大值是 900r/min。模糊PID 仿真结果如图5所示,改进模糊PID仿真曲线如图6所示。图中1为马达的目标转速,2为马达转速的仿真曲线。
仿真结果如图3所示。
(4)阶跃负载仿真
设定负载信号为阶跃信号,,1s时负载从500N.m变为0N.m。马达期望转速为阶跃信号,从 0 r/min 阶跃到 750r/min,模糊PID 仿真结果如图7所示,改进模糊PID仿真曲线如图8所示。图中1为马达的目标转速,2为马达转速的仿真曲线。
(5)方波负载仿真
给定负载信号为方波信号,,1s时负载从500N.m变为0N.m。马达期望转速为阶跃信号,从 0 r/min 阶跃到 750r/min,,模糊PID 仿真结果如图9所示,改进模糊PID仿真曲线如图10所示。图中1为马达的目标转速,2为马达转速的仿真曲线。
(6)正弦负载仿真
负载为正弦信号,),1s时负载从500N.m变为0N.m。马达期望转速是阶跃信号,由0r/min阶跃至750r/min,,模糊PID 仿真结果如图11所示,改进模糊PID仿真曲线如图12所示。图中1为马达的目标转速,2为马达转速的仿真曲线。


3、仿真分析
略
4、参考论文
基于AMESim与Simulin_省略_合仿真的泵控马达调速系统控制研究_王俊倩
粒子群整定模糊PID控制纸机干燥部压力研究_刘滨朝
边栏推荐
- 七、MFC序列化机制和序列化类对象
- LeetCode 1189. “气球” 的最大数量
- DL-31/6电流继电器
- 「游戏引擎 浅入浅出」4.1 Unity Shader和OpenGL Shader
- A,H,K,N
- Robot_Framework:常用内置关键字
- 使用string 容器翻转 字母
- 深度比较两个对象是否相同
- The sword refers to Offer 68 - I. Nearest Common Ancestor of Binary Search Trees
- Dialogue with the father of MySQL: One excellent programmer is worth 5 ordinary programmers
猜你喜欢





随机推荐
USB3.0:VL817Q7-C0的LAYOUT指南(三)
中国的机器人增长
第5章——以程序方式处理MySQL数据表的数据
2022.7.26 模拟赛
请求/响应拦截器写法
微信小程序获取手机号phonenumber.getPhoneNumber接口开发
Robot_Framework:断言
牛客多校2022第四场A,H,K,N
pytroch、tensorflow对比学习—搭建模型范式(构建模型方法、训练模型范式)
JWL-11/2-99.9A电流继电器
Malicious attacks on mobile applications surge by 500%
CSP-S2019 Day1
pytorch、tensorflow对比学习—功能组件(优化器、评估指标、Module管理)
Error: AttributeError: module 'matplotlib' has no attribute 'figure'
七、MFC序列化机制和序列化类对象
(Codeforce 757) E. Bash Plays with Functions
微信小程序接口调用凭证(获取token)auth.getAccessToken接口开发
The solution to the inconsistency between the PaddleX deployment inference model and the GUI interface test results
Code Interview Guide for Programmers CD15 Generating an Array of Windowed Maximums
2022/07/29 入职健海JustFE团队,我学到了高效开发(年中总结)