当前位置:网站首页>【2243】module_param.m
【2243】module_param.m
2022-07-26 11:56:00 【无损检测小白白】
cascade_MIMO_signalProcessing
% 处理原始ADC数据的顶级主测试链。处理链包括adc数据校准模块、量程FFT模块、多普勒FFT
模块,CFAR模块,DOA模块。每个模块在链中实际使用之前都首先初始化。
% Copyright (C) 2018 Texas Instruments Incorporated - http://www.ti.com/
%
%
% Redistribution and use in source and binary forms, with or without
% modification, are permitted provided that the following conditions
% are met:
%
% Redistributions of source code must retain the above copyright
% notice, this list of conditions and the following disclaimer.
%
% Redistributions in binary form must reproduce the above copyright
% notice, this list of conditions and the following disclaimer in the
% documentation and/or other materials provided with the
% distribution.
%
% Neither the name of Texas Instruments Incorporated nor the names of
% its contributors may be used to endorse or promote products derived
% from this software without specific prior written permission.
%
% THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
% "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
% LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
% A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
% OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
% SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
% LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
% DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
% THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
% (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
% OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
%
%
% cascade_MIMO_signalProcessing.m
%
% Top level main test chain to process the raw ADC data. The processing chain including adc data calibration module, range FFT module, DopplerFFT
% module, CFAR module, DOA module. Each module is first initialized before actually used in the chain.
% 处理原始ADC数据的顶级主测试链。处理链包括adc数据校准模块、量程FFT模块、多普勒FFT
% 模块,CFAR模块,DOA模块。每个模块在链中实际使用之前都首先初始化。
clearvars
close all
PLOT_ON = 1; % 1: turn plot on; 0: turn plot off 1:开启;0:关闭
LOG_ON = 1; % 1: log10 scale; 0: linear scale 1: log10刻度;0:线性范围
% numFrames_toRun = 10; %要运行的帧数,可以少于保存在原始数据中的帧数 number of frame to run, can be less than the frame saved in the raw data
SAVEOUTPUT_ON = 0;
PARAM_FILE_GEN_ON = 1;
DISPLAY_RANGE_AZIMUTH_DYNAMIC_HEATMAP = 1 ; % Will make things slower 显示范围方位动态热图 0不显示、1显示
dataPlatform = 'TDA2'
%% get the input path and testList 获取输入路径和testList
pro_path = getenv('CASCADE_SIGNAL_PROCESSING_CHAIN_MIMO'); % getenv的这个调用返回一个空字符数组;getenv会返回一些环境变量
% input_path = strcat(pro_path,'\main\cascade\input\'); % strcat 横向连接字符串
input_path = strcat(pro_path,'input\'); % strcat 横向连接字符串
testList = strcat(input_path,'testList.txt');
%path for input folder 输入文件夹路径
fidList = fopen(testList,'r');
testID = 1;
while ~feof(fidList) % 表示若未读到文件末尾,则继续循环
%% get each test vectors within the test list 获取测试列表中的每个测试向量
% test data file name 测试数据文件名 采集的数据
dataFolder_test = fgetl(fidList); % fgetl()读取每一行
%calibration file name 校准文件名称
dataFolder_calib = fgetl(fidList);
%module_param_file 定义初始化每个信号处理的参数
%module
module_param_file = fgetl(fidList);
%parameter file name for the test测试的参数文件名
%生成测试参数的.m文件,放入 input_path 路径下
pathGenParaFile = [input_path,'test',num2str(testID), '_param.m']; % num2str()把数值转换成字符串
%important to clear the same.m file, since Matlab does not clear cache automatically
%清除同样的文件,因为Matlab不会自动清除缓存
clear(pathGenParaFile);
%generate parameter file for the test to run 生成运行测试的参数文件
if PARAM_FILE_GEN_ON == 1
parameter_file_gen_json(dataFolder_test, dataFolder_calib, module_param_file, pathGenParaFile, dataPlatform);
end
%load calibration parameters 校准参数
load(dataFolder_calib) %load将文件变量加载到工作区中
% simTopObj is used for top level parameter parsing and data loading and saving
% 用于顶级参数解析以及数据加载和保存
simTopObj = simTopCascade('pfile', pathGenParaFile);
% 校准级联
calibrationObj = calibrationCascade('pfile', pathGenParaFile, 'calibrationfilePath', dataFolder_calib);
rangeFFTObj = rangeProcCascade('pfile', pathGenParaFile);
DopplerFFTObj = DopplerProcClutterRemove('pfile', pathGenParaFile);
detectionObj = CFAR_CASO('pfile', pathGenParaFile);
DOAObj = DOACascade('pfile', pathGenParaFile);
% get system level variables
%获取系统级变量
platform = simTopObj.platform;
numValidFrames = simTopObj.totNumFrames;
cnt = 1;
frameCountGlobal = 0;
% Get Unique File Idxs in the "dataFolder_test" 在“dataFolder_test”中获取唯一的文件Idxs
[fileIdx_unique] = getUniqueFileIdx(dataFolder_test);
for i_file = 1:(length(fileIdx_unique))
% Get File Names for the Master, Slave1, Slave2, Slave3
[fileNameStruct]= getBinFileNames_withIdx(dataFolder_test, fileIdx_unique{i_file});
%pass the Data File to the calibration Object 将数据文件传递给校准对象
calibrationObj.binfilePath = fileNameStruct;
%检测结果
detection_results = [];
% Get Valid Number of Frames 获取有效的帧数
[numValidFrames dataFileSize] = getValidNumFrames(fullfile(dataFolder_test, fileNameStruct.masterIdxFile));
%intentionally skip the first frame due to TDA2 故意跳过第一帧,因为TDA2
for frameIdx = 2:1:numValidFrames; % numFrames_toRun运行的帧数
tic % ic表示计时的开始,toc表示计时的结束。
%read and calibrate raw ADC data
%读取并校准原始ADC数据
calibrationObj.frameIdx = frameIdx;
frameCountGlobal = frameCountGlobal+1
adcData = datapath(calibrationObj); % calibrationCascade模块的datapath功能,该功能使用校准来校准ADC数据
% RX Channel re-ordering RX通道重新排序
adcData = adcData(:,:,calibrationObj.RxForMIMOProcess,:);
%only take TX and RXs required for MIMO data analysis 只接收MIMO数据分析所需的TX和RXs
% adcData = adcData
if mod(frameIdx, 10)==1 % b = mod(a,m) 返回用 m 除 a 后的余数
fprintf('Processing %3d frame...\n', frameIdx);
end
%perform 2D FFT 进行二维FFT
rangeFFTOut = [];
DopplerFFTOut = [];
for i_tx = 1: size(adcData,4)
% range FFT
rangeFFTOut(:,:,:,i_tx) = datapath(rangeFFTObj, adcData(:,:,:,i_tx));
% Doppler FFT
DopplerFFTOut(:,:,:,i_tx) = datapath(DopplerFFTObj, rangeFFTOut(:,:,:,i_tx));
end
% CFAR done along only TX and RX used in MIMO array
%仅沿MIMO阵列中使用的TX和RX执行恒虚警
DopplerFFTOut = reshape(DopplerFFTOut,size(DopplerFFTOut,1), size(DopplerFFTOut,2), size(DopplerFFTOut,3)*size(DopplerFFTOut,4));
%detection检测
sig_integrate = 10*log10(sum((abs(DopplerFFTOut)).^2,3) + 1);
% .*表示两个矩阵对应元素相乘
detection_results = datapath(detectionObj, DopplerFFTOut);
detection_results_all{cnt} = detection_results;
detect_all_points = [];
for iobj = 1:length(detection_results)
detect_all_points (iobj,1)=detection_results(iobj).rangeInd+1;
detect_all_points (iobj,2)=detection_results(iobj).dopplerInd_org+1;
detect_all_points (iobj,4)=detection_results(iobj).estSNR;
end
if PLOT_ON
figure(1);
set(gcf,'units','normalized','outerposition',[0 0 1 1]) % gcf 返回当前Figure 对象的句柄值
subplot(2,2,1)
plot((1:size(sig_integrate,1))*detectionObj.rangeBinSize, sig_integrate(:,size(sig_integrate,2)/2+1),'g','LineWidth',4);
hold on;
grid on
for ii=1:size(sig_integrate,2)
plot((1:size(sig_integrate,1))*detectionObj.rangeBinSize, sig_integrate(:,ii));
hold on;
grid on
if ~isempty(detection_results)
ind = find(detect_all_points(:,2)==ii); %find查找非零元素的索引和值
if (~isempty(ind))
rangeInd = detect_all_points(ind,1);
plot(rangeInd*detectionObj.rangeBinSize, sig_integrate(rangeInd,ii),'o','LineWidth',2,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[.49 1 .63],...
'MarkerSize',6);
end
end
end
%title(['FrameID: ' num2str(cnt)]);
xlabel('Range(m)');
ylabel('Receive Power (dB)')
title(['Range Profile(zero Doppler - thick green line): frameID ' num2str(frameIdx)]);
hold off;
subplot(2,2,2);
%subplot_tight(2,2,2,0.1)
imagesc((sig_integrate))
c = colorbar;
c.Label.String = 'Relative Power(dB)';
title(' Range/Velocity Plot');
pause(0.01)
end
angles_all_points = [];
xyz = [];
%if 0
if ~isempty(detection_results)
% DOA, the results include detection results + angle estimation results.
% access data with angleEst{frame}(objectIdx).fieldName
angleEst = datapath(DOAObj, detection_results);
if length(angleEst) > 0
for iobj = 1:length(angleEst)
angles_all_points (iobj,1:2)=angleEst(iobj).angles(1:2);
angles_all_points (iobj,3)=angleEst(iobj).estSNR;
angles_all_points (iobj,4)=angleEst(iobj).rangeInd;
angles_all_points (iobj,5)=angleEst(iobj).doppler_corr;
angles_all_points (iobj,6)=angleEst(iobj).range;
%switch left and right, the azimuth angle is flipped左右切换,方位角翻转
xyz(iobj,1) = angles_all_points (iobj,6)*sind(angles_all_points (iobj,1)*-1)*cosd(angles_all_points (iobj,2));
xyz(iobj,2) = angles_all_points (iobj,6)*cosd(angles_all_points (iobj,1)*-1)*cosd(angles_all_points (iobj,2));
%switch upside and down, the elevation angle is flipped
xyz(iobj,3) = angles_all_points (iobj,6)*sind(angles_all_points (iobj,2)*-1);
xyz(iobj,4) = angleEst(iobj).doppler_corr;
xyz(iobj,9) = angleEst(iobj).dopplerInd_org;
xyz(iobj,5) = angleEst(iobj).range;
xyz(iobj,6) = angleEst(iobj).estSNR;
xyz(iobj,7) = angleEst(iobj).doppler_corr_overlap;
xyz(iobj,8) = angleEst(iobj).doppler_corr_FFT;
end
angles_all_all{cnt} = angles_all_points;
xyz_all{cnt} = xyz;
maxRangeShow = detectionObj.rangeBinSize*rangeFFTObj.rangeFFTSize;
%tic
if PLOT_ON
moveID = find(abs(xyz(:,4))>=0);
subplot(2,2,4);
if cnt==1
scatter3(xyz(moveID,1),xyz(moveID,2),xyz(moveID,3),45,(xyz(moveID,4)),'filled');% 填充图
else
% yz = [xyz_all{cnt}; xyz_all{cnt-1}];
% scatter3(xyz(moveID,1),xyz(moveID,2),xyz(moveID,3),45,(xyz(moveID,4)),'filled');
end
c = colorbar;
c.Label.String = 'velocity (m/s)';
grid on;
xlim([-20 20])
ylim([1 maxRangeShow])
%zlim([-4 4])
zlim([-5 5])
xlabel('X (m)')
ylabel('y (m)')
zlabel('Z (m)')
view([-9 15])
title(' 3D point cloud');
%plot range and azimuth heatmap绘图范围和方位热图
subplot(2,2,3)
STATIC_ONLY = 1;
minRangeBinKeep = 5;
rightRangeBinDiscard = 20;
[mag_data_static(:,:,frameCountGlobal) mag_data_dynamic(:,:,frameCountGlobal) y_axis x_axis]= plot_range_azimuth_2D(detectionObj.rangeBinSize, DopplerFFTOut,...
length(calibrationObj.IdTxForMIMOProcess),length(calibrationObj.RxForMIMOProcess), ...
detectionObj.antenna_azimuthonly, LOG_ON, STATIC_ONLY, PLOT_ON, minRangeBinKeep, rightRangeBinDiscard);
title('range/azimuth heat map static objects')
if (DISPLAY_RANGE_AZIMUTH_DYNAMIC_HEATMAP)
figure(2)
subplot(121);
surf(y_axis, x_axis, (mag_data_static(:,:,frameCountGlobal)).^0.4,'EdgeColor','none');
view(2);
xlabel('meters'); ylabel('meters')
title({'Static Range-Azimuth Heatmap',strcat('Current Frame Number = ', num2str(frameCountGlobal))})
subplot(122);
surf(y_axis, x_axis, (mag_data_dynamic(:,:,frameCountGlobal)).^0.4,'EdgeColor','none');
view(2);
xlabel('meters'); ylabel('meters')
title('Dynamic HeatMap')
end
pause(0.1)
end
end
end
cnt = cnt + 1;
toc
end
end
ind = strfind(dataFolder_test, '\');
testName = dataFolder_test(ind(end-1)+1:(ind(end)-1));
if SAVEOUTPUT_ON == 1
save(['.\main\cascade\output\newOutput_',testName,'.mat'],'angles_all_all', 'detection_results_all','xyz_all');
end
testID = testID + 1;
end
module_param.m
%包含用于信号处理的每个模块的初始参数列表,包括simTopCascade、calibration、rangeFFT、DopplerFFT、CFAR、DOA模块。重要的是要知道,每个参数都需要定义为moudleName\u parameterName,parameterName在相应的模块中定义。在更改此文件之前,用户需要知道每个模块具有哪些参数。
% Copyright (C) 2018 Texas Instruments Incorporated - http://www.ti.com/
%
%
% Redistribution and use in source and binary forms, with or without
% modification, are permitted provided that the following conditions
% are met:
%
% Redistributions of source code must retain the above copyright
% notice, this list of conditions and the following disclaimer.
%
% Redistributions in binary form must reproduce the above copyright
% notice, this list of conditions and the following disclaimer in the
% documentation and/or other materials provided with the
% distribution.
%
% Neither the name of Texas Instruments Incorporated nor the names of
% its contributors may be used to endorse or promote products derived
% from this software without specific prior written permission.
%
% THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
% "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
% LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
% A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
% OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
% SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
% LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
% DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
% THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
% (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
% OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
%
%
% module_param.m
%
% Contains a list of inital parameters for each modules used for signal
% processing, including modules of simTopCascade, calibration, rangeFFT, DopplerFFT, CFAR, DOA
% it is important to know that each parameter needs to be defined as
% moudleName_parameterName, the parameterName is defined in the
% corresponding module. Users need to know what parameters each module have
% before change this file.
%包含用于信号处理的每个模块的初始参数列表,包括simTopCascade、calibration、rangeFFT、DopplerFFT、CFAR、DOA模块。
%重要的是要知道,每个参数都需要定义为moudleName\u parameterName,parameterName在相应的模块中定义。
%在更改此文件之前,用户需要知道每个模块具有哪些参数。
platform = 'TI_4Chip_CASCADE';
%% fixed antenna ID and postion values for TI 4-chip cascade board. Should not be changed if user is based on TI board
%%TI 4芯片级联板的固定天线ID和位置值。如果用户基于TI板,则不应更改
% % Legacy Format TDA
%传统格式TDA
% TI_Cascade_TX_position_azi = [0 4 8 12 16 20 24 28 32 9 10 11];%12 TX antenna azimuth position on TI 4-chip cascade EVM
% TI_Cascade_TX_position_ele = [0 0 0 0 0 0 0 0 0 1 4 6];%12 TX antenna elevation position on TI 4-chip cascade EVM
% New Format TDA
% 新格式 TDA
% TI 4芯片级联EVM上的TX天线方位角位置
TI_Cascade_TX_position_azi = [11 10 9 32 28 24 20 16 12 8 4 0 ];%12 TX antenna azimuth position on TI 4-chip cascade EVM
%TI 4芯片级联EVM上的12 TX天线仰角位置
TI_Cascade_TX_position_ele = [6 4 1 0 0 0 0 0 0 0 0 0];%12 TX antenna elevation position on TI 4-chip cascade EVM
% Legacy RX channel mapping 传统RX信道映射
%TI_Cascade_RX_position_azi = [42:-1:39 3:-1:0 7:-1:4 53:-1:50 ];%16 RX antenna azimuth position on TI 4-chip cascade EVM
% TI_Cascade_RX_position_azi = [0:3 11:14 50:53 46:49 ];
TI_Cascade_RX_position_ele = zeros(1,16);%16 RX antenna elevation position on TI 4-chip cascade EVM
% TI_Cascade_RX_ID = [1 2 3 4 5 6 7 8 13 14 15 16 9 10 11 12]; %RX channel order on TI 4-chip cascade EVM
% Changed for the new Data format 更改为新的数据格式
TI_Cascade_RX_position_azi = [ 11:14 50:53 46:49 0:3 ];
%TI 4芯片级联EVM上的RX信道顺序
TI_Cascade_RX_ID = [13 14 15 16 1 2 3 4 9 10 11 12 5 6 7 8 ]; %RX channel order on TI 4-chip cascade EVM
%天线距离就是为这个频率设计的
TI_Cascade_Antenna_DesignFreq = 76.8; % antenna distance is designed for this frequency
%% constants 常数
speedOfLight = 3e8;
% 比例因子
scaleFactor = [0.0625, 0.03125, 0.015625, 0.0078125, 0.00390625, 0.001953125, 0.0009765625, 0.00048828125]*4;
%% define TX/RX antennas used for virtual array analysis. It can be a subset of the antennas enabled in data capture phase
%TxForMIMOProcess defines antenna TD used for TDM MIMO processing, can
%be a sub set of TxToEnable; CANNOT be channels that not enabled in TxToEnable
%%定义用于虚拟阵列分析的收发天线。它可以是在数据捕获阶段启用的天线的子集
%TXformoProcess定义了用于TDM MIMO处理的天线TD,可以是TxToEnable的子集;不能是未在TxToEnable中启用的通道
TxForMIMOProcess = TxToEnable;
%TxForMIMOProcess = [1:9 ];
[IdTxForMIMOProcess ia ib] = intersect(TxForMIMOProcess, TxToEnable,'stable' );
if length(IdTxForMIMOProcess)~= length(TxForMIMOProcess)
error('TX channel used for processing is not valid')
end
%使用所有16个RX,用户还可以选择RX的子集进行MIMO数据分析
RxForMIMOProcess = TI_Cascade_RX_ID; %using all 16 RXs, user can also choose subset of RXs for MIMO data analysis
%RxForMIMOProcess = [1:8];
%TX方位天线坐标
D_TX = TI_Cascade_TX_position_azi(TxToEnable(ib)); %TX azimuth antenna coordinates
%TX仰角天线坐标
D_TX_ele = TI_Cascade_TX_position_ele(TxToEnable(ib));%TX elevation antenna coordinates
%RX方位天线坐标
D_RX = TI_Cascade_RX_position_azi(RxForMIMOProcess); %RX azimuth antenna coordinate
%RX仰角天线坐标
D_RX_ele = TI_Cascade_RX_position_ele(RxForMIMOProcess);%RX elevation antenna coordinate
%draw the virtual array
%绘制虚拟阵列
plotArray = 0;
RX_id_tot = [];
RX_id_tot_ele = [];
if plotArray == 1
figure(1);
end
for ii = 1:length(D_TX)
RX_id_new = D_RX + sum(D_TX(ii));
RX_id_tot = [RX_id_tot RX_id_new];
RX_id_new_ele = D_RX_ele + D_TX_ele(ii);
RX_id_tot_ele = [RX_id_tot_ele RX_id_new_ele];
if plotArray == 1
plot(RX_id_new,RX_id_new_ele,'o');grid on; hold on
ylim([-8 8])
end
end
D(:,1) = RX_id_tot;
D(:,2) = RX_id_tot_ele;
%% derived parameters
%%导出参数
DopplerFFTSize = 2^(ceil(log2(nchirp_loops)));
numChirpsPerFrame = nchirp_loops*numChirpsInLoop;%nchirp_loops*numTxAnt;
chirpRampTime = numADCSample/adcSampleRate;
chirpBandwidth = chirpSlope * chirpRampTime; % Hz
chirpInterval = chirpRampEndTime + chirpIdleTime;
carrierFrequency = startFreqConst + (adcStartTimeConst + chirpRampTime/2)*chirpSlope; % Hz center frequency
lambda = speedOfLight/carrierFrequency;
maximumVelocity = lambda / (chirpInterval*4) ; % m/s
maxRange = speedOfLight*adcSampleRate*chirpRampTime/(2*chirpBandwidth);
numSamplePerChirp = round(chirpRampTime*adcSampleRate);
rangeFFTSize = 2^(ceil(log2(numSamplePerChirp)));
numChirpsPerVirAnt = nchirp_loops;
numVirtualRxAnt = length(TxForMIMOProcess) * length(RxForMIMOProcess) ;
rangeResolution = speedOfLight/2/chirpBandwidth;
rangeBinSize = rangeResolution*numSamplePerChirp/rangeFFTSize;
velocityResolution = lambda / (2*nchirp_loops * chirpInterval*numTxAnt);
velocityBinSize = velocityResolution*numChirpsPerVirAnt/DopplerFFTSize;
%% simTopCascade parameters
simTopCascade_inputDataSource = 'bin'; % choose from 'mat','bin','gen'
simTopCascade_enable = 1;
simTopCascade_outputDataSavingEnable = 0;
simTopCascade_outputDataFileName = [];
simTopCascade_totNumFrames = frameCount;
simTopCascade_platform = platform;
%% calibration cascade parameters
%用于频率校准的范围FFT的插值因子,在校准阶段确定
calibrationInterp = 5; %interpolation factor used for range FFT for frequency calibration, determined at calibration stage
calibrationCascade_enable = 1;
calibrationCascade_binfilePath = [];
calibrationCascade_calibrationfilePath = [];
calibrationCascade_frameIdx = 1;
calibrationCascade_numSamplePerChirp = numSamplePerChirp;
calibrationCascade_nchirp_loops = nchirp_loops;
calibrationCascade_numChirpsPerFrame = numChirpsPerFrame;
calibrationCascade_TxToEnable = TxToEnable;
calibrationCascade_Slope_calib = Slope_calib;
calibrationCascade_Sampling_Rate_sps = adcSampleRate;
calibrationCascade_fs_calib = fs_calib;
calibrationCascade_chirpSlope = chirpSlope;
calibrationCascade_calibrationInterp = calibrationInterp;
calibrationCascade_TI_Cascade_RX_ID = TI_Cascade_RX_ID;
calibrationCascade_RxForMIMOProcess = RxForMIMOProcess;
calibrationCascade_IdTxForMIMOProcess = IdTxForMIMOProcess;
calibrationCascade_numRxToEnable = numRxToEnable;
%1:仅相位校准;0:相位和幅度校准
calibrationCascade_phaseCalibOnly = 1; % 1: only phase calibration; 0: phase and amplitude calibration
%1: adc数据校准开启;0校准关闭
calibrationCascade_adcCalibrationOn = 1; %1: adc data calibration on; 0 calibration off
%1:表示高级帧配置,该值从顶部主文件传递
calibrationCascade_ADVANCED_FRAME_CONFIG = ADVANCED_FRAME_CONFIG; %1 : indicate advance frame config, this value is passed from top main file
calibrationCascade_dataPlatform = dataPlatform;
calibrationCascade_RxOrder = TI_Cascade_RX_ID;
calibrationCascade_NumDevices = NumDevices;
if ADVANCED_FRAME_CONFIG == 1
%用于在高级帧配置中读取原始adc数据
calibrationCascade_N_TXForMIMO = N_TXForMIMO; % used for read raw adc data in advanced frame config
calibrationCascade_NumAnglesToSweep = NumAnglesToSweep;% used for read raw adc data in advanced frame config
end
%% range FFT parameters
rangeProcCascade_enable = 1;
rangeProcCascade_numAntenna = numVirtualRxAnt; % number of antennas
rangeProcCascade_numAdcSamplePerChirp = numSamplePerChirp; % number of samples per chirp
rangeProcCascade_rangeFFTSize = rangeFFTSize; % FFT size
rangeProcCascade_dcOffsetCompEnable = 1;
%在范围FFT之前启用或禁用窗口的标志
rangeProcCascade_rangeWindowEnable = 1; % flag to enable or disable windowing before range FFT
% rangeProcCascade_rangeWindowCoeff = [0.0800, 0.0894, 0.1173, 0.1624, 0.2231, 0.2967, 0.3802, 0.4703, 0.5633...
% 0.6553, 0.7426, 0.8216, 0.8890 0.9422, 0.9789, 0.9976]; % range FFT window coefficients
%windowCoeff = hann_local(numSamplePerChirp);
windowCoeff = hanning(numSamplePerChirp);
rangeProcCascade_rangeWindowCoeff = windowCoeff(1:(numSamplePerChirp/2));
rangeProcCascade_scaleFactorRange = scaleFactor(log2(rangeFFTSize) - 3);
%1: 应用scaleFactorRange;0:未应用比例因子
rangeProcCascade_FFTOutScaleOn = 0; %1: apply scaleFactorRange; 0: scaling factor not applied
%% Doppler FFT parameters
DopplerProcClutterRemove_enable = 1;
DopplerProcClutterRemove_numAntenna = numVirtualRxAnt; % number of antennas
DopplerProcClutterRemove_numDopplerLines = rangeFFTSize; % number of Doppler lines 多普勒线数
DopplerProcClutterRemove_dopplerFFTSize = DopplerFFTSize; % Doppler FFT size
DopplerProcClutterRemove_numChirpsPerVirAnt = numChirpsPerVirAnt;
%多普勒FFT前启用或禁用窗口的标志
DopplerProcClutterRemove_dopplerWindowEnable = 0; % flag to enable or disable windowing before Doppler FFT
windowCoeff = hanning(numChirpsPerVirAnt);
DopplerProcClutterRemove_dopplerWindowCoeff = windowCoeff(1:(numChirpsPerVirAnt/2));
DopplerProcClutterRemove_scaleFactorDoppler = scaleFactor(log2(DopplerFFTSize) - 3);
%1: 应用scaleFactorRange;0:未应用比例因子
DopplerProcClutterRemove_FFTOutScaleOn = 0; %1: apply scaleFactorRange; 0: scaling factor not applied
%1=启用杂波消除;0=否
DopplerProcClutterRemove_clutterRemove = 0; %1=enable clutter removal; 0=no
%% detection parameters
ind = find(D(:,2)==0);
[val ID_unique] = unique(D(ind,1));
%仅用于唯一方位ID的虚拟通道ID
antenna_azimuthonly = ind(ID_unique); %virtual channel ID only for unique azimuth ID
CFAR_CASO_enable = 1;
%(CASO-CFAR)双通道rng/dop;仅支持一种恒虚警方法
CFAR_CASO_detectMethod = 1; %(CASO-CFAR)dualpass rng/dop; only support one CFAR method
CFAR_CASO_numAntenna = numVirtualRxAnt; %number of antennas
%估计噪声方差的参考单元数
CFAR_CASO_refWinSize = [8, 4]; % number of reference cells to estimate noise variance
%防止泄漏被检测为信号的间隙单元数量
CFAR_CASO_guardWinSize = [8, 0]; % number of gap cells to prevent leakage being detected as signal
%阈值比例因子——6.3对应于8dB的SNR
CFAR_CASO_K0 = [5 3]; % Threshold scaling factor -- 6.3 corresponds to SNR of 8dB
%1: 仅在窗口内最大时检测;0:否则
CFAR_CASO_maxEnable = 0; %1: detect only if it is the maximum within window; 0: otherwise
%用于确定用于检测的噪声级的百分比
CFAR_CASO_ratio_OS = 0.65; % percentage used to determine noise level used for detection
CFAR_CASO_rangeBinSize = rangeBinSize;
CFAR_CASO_velocityBinSize = velocityBinSize;
CFAR_CASO_dopplerFFTSize = DopplerFFTSize; % Doppler FFT size
%如果检测到的信号功率低于该水平,则丢弃该目标。
CFAR_CASO_powerThre = 0; % if power of detected signal is less than this level, drop off this object.
%由于DC周围的失真(正频率)而丢弃的范围盒数
CFAR_CASO_discardCellLeft = 10; % Number of range bins to discard due to distortions around DC (positive frequencies)
%由于DC周围的失真(负频率)而丢弃的范围箱数量
CFAR_CASO_discardCellRight = 20; % Number of range bins to discard due to distortions around DC (negative frequencies)
CFAR_CASO_numRxAnt = length(RxForMIMOProcess);
CFAR_CASO_TDM_MIMO_numTX = length(TxForMIMOProcess);
%仅用于唯一方位ID的虚拟通道ID
CFAR_CASO_antenna_azimuthonly = antenna_azimuthonly; %virtual channel ID only for unique azimuth ID
%在该范围内,流量计不应用最大速度扩展
CFAR_CASO_minDisApplyVmaxExtend = 10; % meter, within this range, do not apply max velocity extension
CFAR_CASO_applyVmaxExtend = 0;
%find the overlap antenna ID that can be used for phase compensation
%查找可用于相位补偿的重叠天线ID
TX_ID_MIMO = repmat(1:length(TxForMIMOProcess),length(RxForMIMOProcess),1);
TX_ID_MIMO = TX_ID_MIMO(:);
sumTwo = D(:,1)*10 + D(:,2);
[val id] = unique(sumTwo);
id_repeat = setxor(id, 1:length(sumTwo));
overlapAntenna_ID = []; % 重叠天线ID
%found the overlap antenna ID
%找到重叠天线ID
for ii = 1:length(id_repeat)
%ID of pair
%配对ID
overlapAntenna_ID(ii,1:2) = find(sumTwo == sumTwo(id_repeat(ii)));
%associated TX of each pair
%每对的相关发送
overlapAntenna_ID(ii,3:4) =TX_ID_MIMO(overlapAntenna_ID(ii,1:2));
end
if length(overlapAntenna_ID) > 0
%find the pairs offset only by 1 chirp/TX in time
%在时间上仅查找1个啁啾/TX的对偏移
dif_TX = abs(overlapAntenna_ID(:,3) - overlapAntenna_ID(:,4));
ID_dif_1TX = find((dif_TX) == 1 );
CFAR_CASO_overlapAntenna_ID = overlapAntenna_ID(ID_dif_1TX,:);
ID_dif_2TX = find(dif_TX == 2);
CFAR_CASO_overlapAntenna_ID_2TX = overlapAntenna_ID(ID_dif_2TX,:);
ID_dif_3TX = find(dif_TX == 3);
CFAR_CASO_overlapAntenna_ID_3TX = overlapAntenna_ID(ID_dif_3TX,:);
else
CFAR_CASO_overlapAntenna_ID = [];
CFAR_CASO_overlapAntenna_ID_2TX = [];
CFAR_CASO_overlapAntenna_ID_3TX = [];
end
%% DOA parameters
% optimal d value used of for RF frequency of 76G 77G 78G 79G 80G
%用于76G 77G 78G 79G 80G射频频率的最佳d值
%d_optimal_calib = [0.495 0.504 0.51 0.516 0.522];
% switch centerFreq
% case 76
% d_optimal = d_optimal_calib(1);
% case 77
% d_optimal = d_optimal_calib(2);
% case 78
% d_optimal = d_optimal_calib(3);
% case 79
% d_optimal = d_optimal_calib(4);
% case 80
% d_optimal = d_optimal_calib(5);
% end
d_optimal = 0.5 * centerFreq / TI_Cascade_Antenna_DesignFreq;
DOACascade_enable = 1;
DOACascade_D = D;
DOACascade_DOAFFTSize = 256;
DOACascade_numAntenna = numVirtualRxAnt;
DOACascade_antPos = [0:numVirtualRxAnt-1];
DOACascade_antDis = d_optimal; % in terms of lamda 就lamda而言
%1:2D多目标波束形成,2:2D多目标波束形成和azi/ele FFT后的峰值搜索
DOACascade_method = 1; % 1: 2D muli-object beamforming, 2: 2D muli-object beamforming and peak search after azi/ele FFT
%在方位角上运行2D DOA的视野
DOACascade_angles_DOA_az=[-80 80]; %field of view to run 2D DOA in azimuth
%在仰角中运行二维DOA的视野
DOACascade_angles_DOA_ele = [-20 20];%field of view to run 2D DOA in elevation
%用于峰值检测
DOACascade_gamma = 10^(0.2/10); % Used in peak detection
%用于在方位扫描2D DOA中抑制旁瓣
DOACascade_sidelobeLevel_dB_azim = 1; % used to reject sidelobe in azimuth run 2D DOA
%用于抑制仰角运行2D DOA中的旁瓣
DOACascade_sidelobeLevel_dB_elev = 0;% used to reject sidelobe in elevation run 2D DOA
DOACascade_dopplerFFTSize = DopplerFFTSize;
simTopCascade.m
% Copyright (C) 2018 Texas Instruments Incorporated - http://www.ti.com/
%
%
% Redistribution and use in source and binary forms, with or without
% modification, are permitted provided that the following conditions
% are met:
%
% Redistributions of source code must retain the above copyright
% notice, this list of conditions and the following disclaimer.
%
% Redistributions in binary form must reproduce the above copyright
% notice, this list of conditions and the following disclaimer in the
% documentation and/or other materials provided with the
% distribution.
%
% Neither the name of Texas Instruments Incorporated nor the names of
% its contributors may be used to endorse or promote products derived
% from this software without specific prior written permission.
%
% THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
% "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
% LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
% A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
% OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
% SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
% LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
% DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
% THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
% (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
% OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
%
%
%simTopCascade.m
%
%simTopCascade module definition. Contains some top level parameters.
%simTopCascade模块定义。包含一些顶级参数。
classdef simTopCascade < Module
%% properties
% 属性
properties (Access = public)
inputDataSource = 'bin'; % choose from 'mat','bin','gen'
outputDataSavingEnable = 0;
outputDataFileName = [];
platform = [];
totNumFrames = 0;
end
methods
%% constructor
%构造函数
function obj = simTopCascade(varargin) % varargin = ['pfile'] {'input\test1_param.m'}
if(isempty(find(strcmp(varargin,'name'), 1))) % strcmp比较字符串
varargin = [varargin, 'name','simTopCascade']; % varargin = ['pfile'] {'input\test1_param.m'} 'name','simTopCascade'
end
[email protected](varargin{:});
obj.enable = getParameter(obj, 'enable'); %获取参数
obj.inputDataSource = getParameter(obj, 'inputDataSource');
obj.outputDataSavingEnable = getParameter(obj, 'outputDataSavingEnable');
obj.outputDataFileName = getParameter(obj, 'outputDataFileName');
obj.platform = getParameter(obj, 'platform');
obj.totNumFrames = getParameter(obj, 'totNumFrames');
% overwritten the property value inside parameter file
%setProperties(obj, nargin, varargin{:});
obj = set(obj, varargin{:});
end
end
end
getParameter.m
function par = getParameter(obj, varargin)
try
str = fullfile(obj.name, varargin{:});
str = strrep(str, filesep, '_');
%eval(obj.pfile);
run(obj.pfile);
par = eval(str);
catch
error(['MODULE:' obj.name], 'Invalid parameter');
endcalibrationCascade.m



rangeProcCascade.m


DopplerProcClutterRemove.m


CFAR_CASO.m


DOACascade.m


getUniqueFileIdx.m
function [binId_unique]= getUniqueFileIdx(dataFolder_test)
currentFolder = pwd; % pwd确定当前文件夹
cd(dataFolder_test);
listing = dir('*_data.bin');
cd(currentFolder);
% (a) Find all the binaryFile Id numbers
% Search for '_' and extract the numerical value
%(a)查找所有二进制文件Id号
%搜索‘_’并提取数值
binFileId = [];
for jj=1:length(listing)
fileName = listing(jj).name;
[ind]=find(fileName == '_');
binIdnumSearch = str2num(fileName(ind(1)+1:ind(2)-1));
binFileId = [binFileId; binIdnumSearch];
end
binFileId = unique(binFileId);
binId_unique = {};
for jj=1:length(binFileId)
binId_unique{jj} = num2str(binFileId(jj),'%04d');
end


getBinFileNames_withIdx.m
% 获取Master、Slave1、Slave2、Slave3的文件名 带‘0000’的文件

getValidNumFrames.m
% Get Valid Number of Frames 获取有效的帧数
% get number of valid frames in the associated *_data.bin file captured
% with TDA2 platform
% File header in *_idx.bin:
% struct Info
% {
% uint32_t tag;
% uint32_t version;
% uint32_t flags;
% uint32_t numIdx; // number of frames
% uint64_t dataFileSize; // total data size written into file
% };
%
% Index for every frame from each radar:
% struct BuffIdx
% {
% uint16_t tag;
% uint16_t version; /*same as Info.version*/
% uint32_t flags;
% uint16_t width;
% uint16_t height;
% uint32_t pitchOrMetaSize[4]; /*For image data, this is pitch.
% For raw data, this is size in bytes per metadata plane.*/
% uint32_t size; /*total size in bytes of the data in the buffer (sum of all planes)*/
% uint64_t timestamp;
% uint64_t offset;
% };
function [numIdx dataFileSize] = getValidNumFrames(adcIdxFileName)
idxFile = fopen(adcIdxFileName,'r');
heaferInfoSize = 6;
heaferInfo = fread(idxFile, heaferInfoSize,'uint32');
%有效帧数
numIdx = heaferInfo(4); % number of effective frame
fclose(idxFile);
idxFile = fopen(adcIdxFileName,'r');
heaferInfoSize = 3;
heaferInfo = fread(idxFile, heaferInfoSize,'uint64');
%有效帧数的数据大小
dataFileSize = heaferInfo(3); % data size for the effective number of frames
fclose(idxFile);
end






datapath.m
%数据路径.m
%
%calibrationCascade模块的datapath功能,该功能使用安装有calibrationfilePath给定路径名的校准矩阵校准ADC数据。在进一步处理之前,直接对原始ADC数据进行校准。在时域中应用频率和相位校准;振幅校准是可选的,可以打开或关闭
%输入
%obj:calibrationCascade的对象实例
%datapath.m
%
% datapath function of calibrationCascade module, this function calibrates the ADC data with the calibration
% matrix installed with the path name given by calibrationfilePath.
% Calibration is done directly on the raw ADC data before any further
% processing. Apply frequency and phase calibration in time domain; amplitude
% calibration is optional, can be turned on or off
%
%input
% obj: object instance of calibrationCascade
function outData = datapath(obj)
%load calibration file
load(obj.calibrationfilePath);
RangeMat = calibResult.RangeMat;
PeakValMat = calibResult.PeakValMat;
fileFolder = obj.binfilePath;
frameIdx = obj.frameIdx;
numSamplePerChirp = obj.numSamplePerChirp;
nchirp_loops = obj.nchirp_loops;
numChirpsPerFrame = obj.numChirpsPerFrame;
TxToEnable = obj.TxToEnable;
Slope_calib = obj.Slope_calib;
fs_calib = obj.fs_calib;
Sampling_Rate_sps = obj.Sampling_Rate_sps;
chirpSlope = obj.chirpSlope;
calibrationInterp = obj.calibrationInterp;
TI_Cascade_RX_ID = obj.TI_Cascade_RX_ID;
RxForMIMOProcess = obj.RxForMIMOProcess;
IdTxForMIMOProcess = obj.IdTxForMIMOProcess;
numRX = obj.numRxToEnable;
phaseCalibOnly = obj.phaseCalibOnly;
adcCalibrationOn = obj.adcCalibrationOn;
N_TXForMIMO = obj.N_TXForMIMO;
NumAnglesToSweep = obj.NumAnglesToSweep ;
RxOrder = obj.RxOrder;
NumDevices = obj.NumDevices;
numTX = length(TxToEnable);
outData = [];
fileName=[fileFolder];
switch obj.dataPlatform
case 'TDA2'
numChirpPerLoop = obj.numChirpsPerFrame/obj.nchirp_loops;
numLoops = obj.nchirp_loops;
%固定数量
numRXPerDevice = 4; % Fixed number 每个设备的接收数
[radar_data_Rxchain] = read_ADC_bin_TDA2_separateFiles(fileName,frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, 1);
otherwise
error('Not supported data capture platform!');
end
%use the first TX as reference by default
TX_ref = TxToEnable(1);
if adcCalibrationOn == 0
outData = radar_data_Rxchain;
else
for iTX = 1: numTX
%use first enabled TX1/RX1 as reference for calibration
%使用第一个启用的TX1/RX1作为校准参考
TXind = TxToEnable(iTX);
% TXind = iTX;
%construct the frequency compensation matrix
%构建频率补偿矩阵
freq_calib = (RangeMat(TXind,:)-RangeMat(TX_ref,1))*fs_calib/Sampling_Rate_sps *chirpSlope/Slope_calib;
freq_calib = 2*pi*(freq_calib)/(numSamplePerChirp * calibrationInterp);
correction_vec = (exp(1i*((0:numSamplePerChirp-1)'*freq_calib))');
freq_correction_mat = repmat(correction_vec, 1, 1, nchirp_loops);
freq_correction_mat = permute(freq_correction_mat, [2 3 1]);
outData1TX = radar_data_Rxchain(:,:,:,iTX).*freq_correction_mat;
%construct the phase compensation matrix
%构造相位补偿矩阵
phase_calib = PeakValMat(TX_ref,1)./PeakValMat(TXind,:);
%remove amplitude calibration
%删除振幅校准
if phaseCalibOnly == 1
phase_calib = phase_calib./abs(phase_calib);
end
phase_correction_mat = repmat(phase_calib.', 1,numSamplePerChirp, nchirp_loops);
phase_correction_mat = permute(phase_correction_mat, [2 3 1]);
outData(:,:,:,iTX) = outData1TX.*phase_correction_mat;
end
end
%re-order the RX channels so that it correspond to the channels of
% ******** 16_lamda **** 4_lamda ****
% and only maintain RX/TX data used for requred MIMO analysis.
% outData = outData(:,:,RxForMIMOProcess,IdTxForMIMOProcess);
% outData = outData(:,:,RxForMIMOProcess,:);
'E:\MMWAVE STUDIO\mmwave_studio_03_00_00_14\mmWaveStudio\MatlabExamples\4chip_cascade_MIMO_example\main\cascade\input\calibrateResults_high.mat'

read_ADC_bin_TDA2_separateFiles
%% read raw adc data with MIMO
%%使用MIMO读取原始adc数据
function [radar_data_Rxchain] = read_ADC_bin_TDA2_separateFiles(fileNameCascade,frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, numDevices)
dataFolder =fileNameCascade.dataFolderName;
fileFullPath_master = fullfile(dataFolder,fileNameCascade.master);
fileFullPath_slave1 = fullfile(dataFolder,fileNameCascade.slave1);
fileFullPath_slave2 = fullfile(dataFolder,fileNameCascade.slave2);
fileFullPath_slave3 = fullfile(dataFolder,fileNameCascade.slave3);
[radar_data_Rxchain_master] = readBinFile(fileFullPath_master, frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, numDevices);
[radar_data_Rxchain_slave1] = readBinFile(fileFullPath_slave1, frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, numDevices);
[radar_data_Rxchain_slave2] = readBinFile(fileFullPath_slave2, frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, numDevices);
[radar_data_Rxchain_slave3] = readBinFile(fileFullPath_slave3, frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, numDevices);
% Arranged based on Master RxChannels, Slave1 RxChannels, slave2 RxChannels, slave3 RxChannels
% The RX channels are re-ordered according to "TI_Cascade_RX_ID" defined in
% "module_params.m"
%基于主RX通道、从1 RX通道、从2 RX通道、从3 RX通道排列
%根据中定义的“TI\u Cascade\u RX\u ID”对RX信道进行重新排序
%“模块参数m”
radar_data_Rxchain(:,:,1:4,:) = radar_data_Rxchain_master;
radar_data_Rxchain(:,:,5:8,:) = radar_data_Rxchain_slave1;
radar_data_Rxchain(:,:,9:12,:) = radar_data_Rxchain_slave2;
radar_data_Rxchain(:,:,13:16,:) = radar_data_Rxchain_slave3;
end
function [adcData1Complex] = readBinFile(fileFullPath, frameIdx,numSamplePerChirp,numChirpPerLoop,numLoops, numRXPerDevice, numDevices)
% 每帧预期的采样数
Expected_Num_SamplesPerFrame = numSamplePerChirp*numChirpPerLoop*numLoops*numRXPerDevice*2;
fp = fopen(fileFullPath, 'r');
fseek(fp,(frameIdx-1)*Expected_Num_SamplesPerFrame*2, 'bof'); % fseek()移至文件中的指定位置
adcData1 = fread(fp,Expected_Num_SamplesPerFrame,'uint16');
neg = logical(bitget(adcData1, 16));
adcData1(neg) = adcData1(neg) - 2^16;
%%
adcData1 = adcData1(1:2:end) + sqrt(-1)*adcData1(2:2:end); % 实部加虚部
adcData1Complex = reshape(adcData1, numRXPerDevice, numSamplePerChirp, numChirpPerLoop, numLoops);
adcData1Complex = permute(adcData1Complex, [2 4 1 3]); % 置换数组维度
fclose(fp);
end




datapath function == rangeFFTOut
%% datapath function
% input: adc data, assuming size(input) = [numSamplePerChirp, numChirpsPerFrame numAntenna]
function [out] = datapath(obj, input)
numLines = size(input,2);
numAnt = size(input,3);
% dopplerWinLen = length(obj.dopplerWindowCoeff);
if obj.enable
% initialize
out = zeros(obj.rangeFFTSize, numLines, numAnt);
for i_an = 1:numAnt
% vectorized version %矢量化版本
inputMat = squeeze(input(:,:,i_an)); % squeeze删除长度为 1 的维度
% DC offset compensation 直流偏移补偿
inputMat = bsxfun(@minus, inputMat, mean(inputMat)); % 对两个数组应用按元素运算(启用隐式扩展)
% apply range-domain windowing 应用范围域窗口
inputMat = bsxfun(@times, inputMat, obj.rangeWindowCoeffVec);
% Range FFT
fftOutput = fft(inputMat, obj.rangeFFTSize);
% apply Doppler windowing and scaling to the output. Doppler windowing moved to DopplerProc.m (5/24)
% fftOutput = bsxfun(@times, fftOutput, obj.scaleFactorRange*obj.dopplerWindowCoeffVec.');
% 对输出应用多普勒窗口和缩放。多普勒窗口移到DopplerProc.m(5/24)
if obj.FFTOutScaleOn == 1 % FFT输出比例开启
fftOutput = fftOutput * obj.scaleFactorRange;
end
% populate in the data cube
%在数据立方体中填充
out(:,:,i_an) = fftOutput;
end
else
out = input;
end
enddatapath function == DopplerFFTObj
% datapath function
% input: adc data, assuming size(input) = [numSamplePerChipr numChirpsPerFrame numAntenna]
function [out] = datapath(obj, input)
numLines = size(input,1);
numAnt = size(input,3);
if obj.enable
% initialize
out = zeros(numLines, obj.dopplerFFTSize, numAnt);
for i_an = 1:numAnt
%% vectorized version
inputMat = squeeze(input(:,:,i_an));
inputMat = bsxfun(@times, inputMat, obj.dopplerWindowCoeffVec.');
if obj.clutterRemove ==1 % 杂波消除
inputMat = inputMat - (repmat(mean(inputMat'),size(inputMat,2),1))';
end
fftOutput = fft(inputMat, obj.dopplerFFTSize, 2);
if obj.FFTOutScaleOn ==1 %FFT输出比例开启
fftOutput = fftshift(fftOutput, 2) * obj.scaleFactorDoppler;
else
fftOutput = fftshift(fftOutput, 2);
end
% populate in the data cube
%在数据立方体中填充
out(:,:,i_an) = fftOutput;
end
else
out = input;
end
end边栏推荐
- Acwing727. Diamond pattern
- Mongodn database is connected in the form of URL
- 数智转型,管理先行|JNPF全力打造“全生命周期管理”平台
- On the construction and management of low code technology in logistics transportation platform
- 按位与怎么写SQL
- 了解string类
- DS-24C/DC220V时间继电器
- Pytest interface automated testing framework | using multiple fixtures
- 大佬们,请教一下,我按照文档配了cdc连接oracle,总是运行报错找不到类 ValidstionE
- [ten thousand words long text] Based on LSM tree thought Net 6.0 C # realize kV database (case version)
猜你喜欢

三维点云课程(八)——特征点匹配
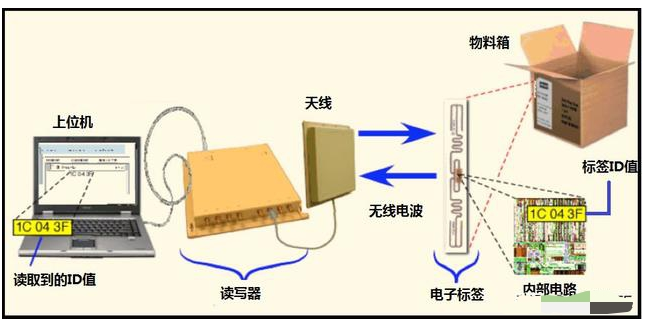
RFID的工作原理

The latest heart-shaped puzzle applet source code + with flow master

pytest接口自动化测试框架 | pytest常用插件

Why is redis so fast? Redis threading model and redis multithreading

el-form 每行显示两列,底部按钮居中

Use and optimization of MySQL composite index (multi column index)

【倒计时10天】腾讯云音视频专场即将见面,千元大奖等你来拿!

【活动早知道】LiveVideoStack近期活动一览

Network protocol: tcp/ip protocol
随机推荐
MySQL组合索引(多列索引)使用与优化
Pytorch深度学习快速入门教程 -- 土堆教程笔记(二)
网络协议:TCP/IP协议
Why BGP server is used in sunflower remote control? Automatic optimal route and high-speed transmission across operators
征婚故事
Acwing727. Diamond pattern
Win10 uses NVM to install node, NPM, and cnpm
Introduction to FPGA (I) - the first FPGA project
There are various signs that apple is expected to support AV1
Mongodn database is connected in the form of URL
How did the $50000 annual salary run out
Audio and video technology development weekly | 255
pytest接口自动化测试框架 | 重新运行失败用例
Talking about web vitals
MILA旗下初创企业Ubenwa获得250万美元投资,研究婴儿健康AI诊断
剑指 Offer 24. 反转链表
Recalling Sister Feng
【附下载】一款强大的Web自动化漏洞扫描工具——Xray
【安徽大学】考研初试复试资料分享
零基础小白也能懂的 Redis 数据库,手把手教你易学易用!