当前位置:网站首页>golang刷leetcode动态规划(9)不同路径 II
golang刷leetcode动态规划(9)不同路径 II
2022-08-02 17:37:00 【用户9710217】
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
说明:m 和 n 的值均不超过 100。
示例 1:
输入:
[
[0,0,0],
[0,1,0],
[0,0,0]
]
输出: 2
解释:
3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右解题思路 1,这是一个典型的动态规划题
2,子问题拆分:由于每个点只能从左往右或者从上往下
递推公式为m[i][j]=m[i-1][j]+m[i][j-1],由于用到了i-1,j-1所以i,j均递增
3,如果有路障
m[i][j]=0
4,边界问题
如果左上角为1则m[0][0]=0,否则为1
5,最上水平的位置只能从左往右,最左垂直位置只能从上往下
故 m[i][0]=m[i-1][0],m[0][j]=m[0][j-1]
如果有路障 m[i][0]=0,m[0][j]=0
func uniquePathsWithObstacles(obstacleGrid [][]int) int {
if len(obstacleGrid)==0{
return 0
}
m:=make([][]int,len(obstacleGrid))
for i:=0;i<len(obstacleGrid);i++{
m[i]=make([]int,len(obstacleGrid[0]))
}
if obstacleGrid[0][0]==1{
return 0
}
m[0][0]=1
for i:=1;i<len(obstacleGrid);i++{
if obstacleGrid[i][0]==1{
m[i][0]=0
}else{
m[i][0]=m[i-1][0]
}
}
for j:=1;j<len(obstacleGrid[0]);j++{
if obstacleGrid[0][j]==1{
m[0][j]=0
}else{
m[0][j]=m[0][j-1]
}
}
for i:=1;i<len(obstacleGrid);i++{
for j:=1;j<len(obstacleGrid[0]);j++{
if obstacleGrid[i][j]==1{
m[i][j]=0
}else{
m[i][j]=m[i-1][j]+m[i][j-1]
}
}
}
return m[len(obstacleGrid)-1][len(obstacleGrid[0])-1]
}边栏推荐
猜你喜欢
![[C Language Brush Questions] Three Questions for Getting Started with Pointers | String Length, String Copy, Two Number Swap](/img/40/0bf9f887051954131b346ece0765d4.png)
[C Language Brush Questions] Three Questions for Getting Started with Pointers | String Length, String Copy, Two Number Swap
php弱类型-攻防世界lottery
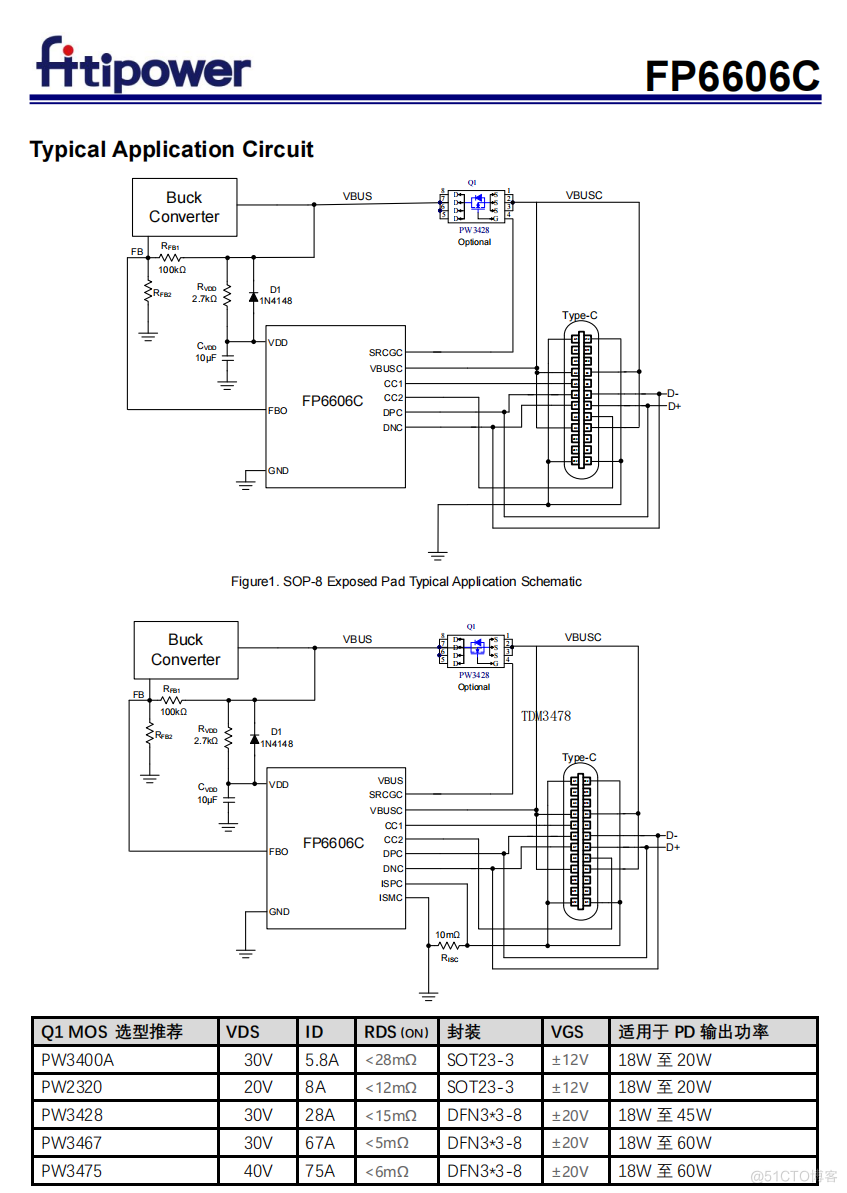
FP6606CLP5 SOP-8 USB Type-C和PD充电控制器
今年上半年,我国公路建设总体形势持续向好

一朵“云“如何带来产业新变革
土巴兔IPO五次折戟,互联网家装未解“中介”之痛
Cpolar application example of data acquisition equipment
Go 语言快速入门指南: 介绍及安装

我用这一招让团队的开发效率提升了 100%!
golang学习之七:并发编程基础(goroutine、channel、select)
随机推荐
判断文件属主
【无标题】
Simulink脚本自动创建Autosar Parameter Port及Mapping
IDEA相关配置(特别完整)看完此篇就将所有的IDEA的相关配置都配置好了、设置鼠标滚轮修改字体大小、设置鼠标悬浮提示、设置主题、设置窗体及菜单的字体及字体大小、设置编辑区主题、通过插件更换主题
每日优鲜倒了,叮咚买菜的春天在哪?
STL案例-招聘新员工
golang源码阅读(11)GO中各个目录的功能
LeetCode·每日一题·
Gear 月度更新|6 月
图解LeetCode——622. 设计循环队列(难度:中等)
NAACL 2022 | 具有元重加权的鲁棒自增强命名实体识别技术
Wechat Gymnasium Appointment Mini Program Graduation Design Finished Works (7) Mid-term Inspection Report
H5网页播放器EasyPlayer.js播放器界面的加载效果无法消失是什么原因?
Go编译原理系列6(类型检查)
电烙铁的基础知识
vulnhub W34kn3ss: 1
MySQL基本语法
小程序毕设作品之微信体育馆预约小程序毕业设计成品(6)开题答辩PPT
KunlunBase 1.0 is released!
研发运营一体化(DevOps)能力成熟度模型