当前位置:网站首页>Not All Points Are Equal Learning Highly Efficient Point-based Detectors for 3D LiDAR Point
Not All Points Are Equal Learning Highly Efficient Point-based Detectors for 3D LiDAR Point
2022-07-07 03:22:00 【Master Ma】
One The core idea
In order to reduce memory and computing costs , Existing based on point Of pipeline Random sampling or FPS Sampling to gradually down sample the input point cloud , Although not all points are equally important to the target detection task . especially , In essence, the front scenic spot is more important to the target detector than the background point . Based on this , This paper presents an efficient single-stage point-based 3D detection——IA-SSD.
The key of this method is to use two learnable 、 Task oriented 、 Instance aware down sample strategy To choose hierarchically belonging to object Of foreground point. Besides , We also introduced contextual centroid perception module To further estimate the precise object center. Last , In order to improve efficiency , We only use encoder-only Architecture of IA-SSD.
The method of this paper draws lessons from 3DSSD Framework , The main contribution is to adjust the sampling strategy of each layer , Every time down sample Sampling , The former scenic spots account for the majority .
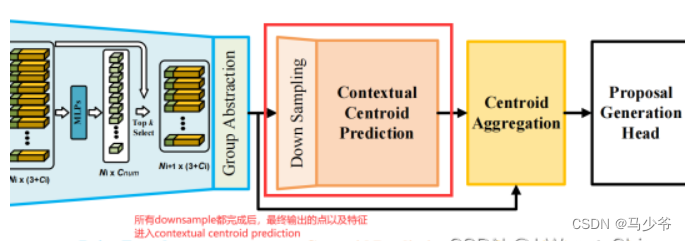
The specific framework is shown in the figure below :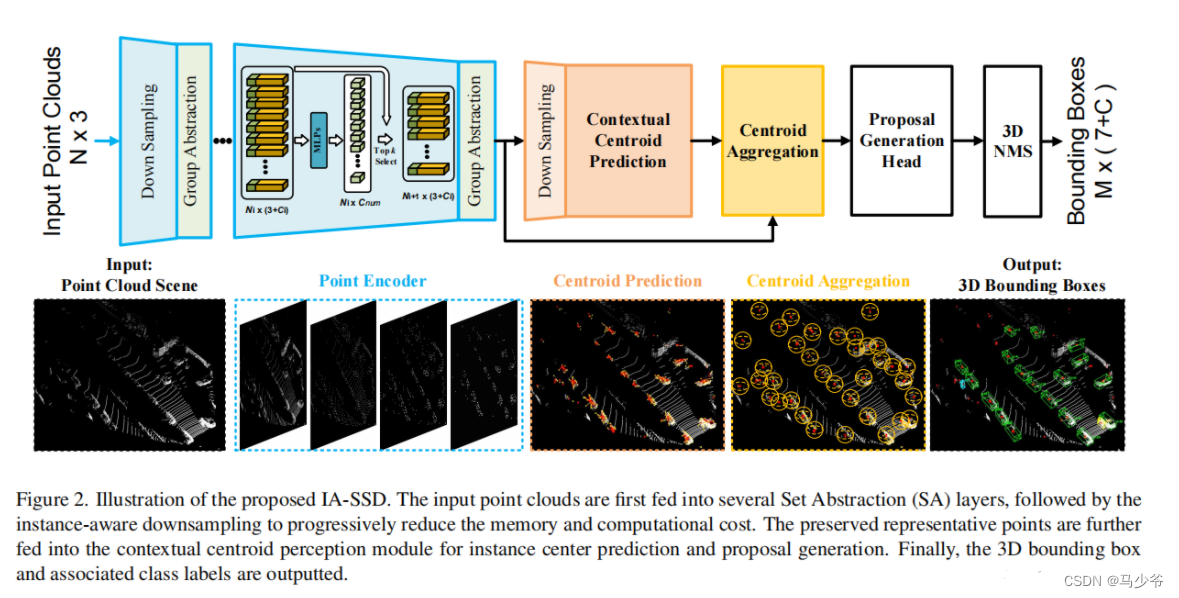
Two The core step
The existing point-based In its framework, the detector usually adopts task independent sampling methods , Such as random sampling or farthest point sampling . Although for reducing memory / Calculation cost effective , But in progressive down sampling , The most important foreground point It will also reduce . Besides , Because there are great differences in the size and geometry of different objects , Existing detectors usually train individual models with various carefully adjusted superparameters for different types of objects . However , This will inevitably affect the deployment of these models in practice . therefore , The goal of this paper is : Can we train a single point based model , This model can efficiently detect multiple kinds of targets at one time .
Based on this , This paper presents an efficient single-stage detector , By introducing instance-aware downsampling and contextual centroid perception module. As shown in the figure above , IA-SSD Adopted 3DSSD Feature extraction architecture in . First, enter the LiDAR Point cloud input to the network to extract point features, And then put forward instance-aware downsampling, To gradually reduce computing costs , At the same time, keep information rich foreground point. The learned potential characteristics are further input into contextual centroid perception module, Generate proposal And return to the final bounding box .
Therefore, this paper has two main points : instance-aware downsampling and contextual centroid perception module.
2.1 Instance-aware Downsampling Strategy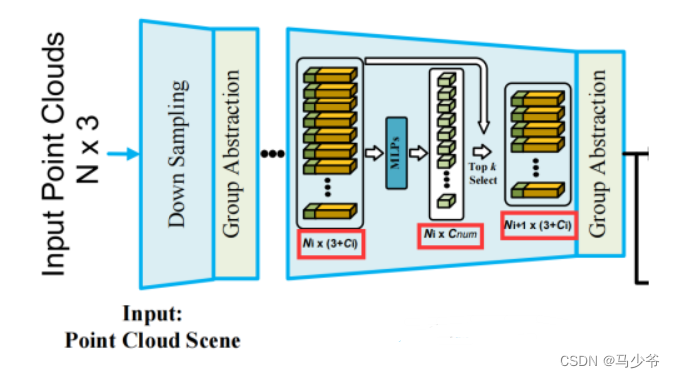
As shown in the figure above , In order to preserve as much as possible foreground point, We turn to exploiting the underlying semantics of each point , Because with hierarchical aggregation, it operates in each layer , The learned point features may contain richer semantic information . Based on this idea , We proposed class-aware sampling and centroid-aware sampling Two task oriented sampling methods , Integrating foreground semantic Apriori into network training pipeline in .
Class-aware sampling: It's in sampling , Prediction of scenic spots before joining head, The formula is as follows :
Centroid-aware sampling( Only in training Used in the process ): Here we are class-aware sampling when , Considering the distance object The central point should be taken into account , Therefore, the weight of the predicted distance center is used head, The formula is as follows :

This is also a method I want to predict the distance Center .
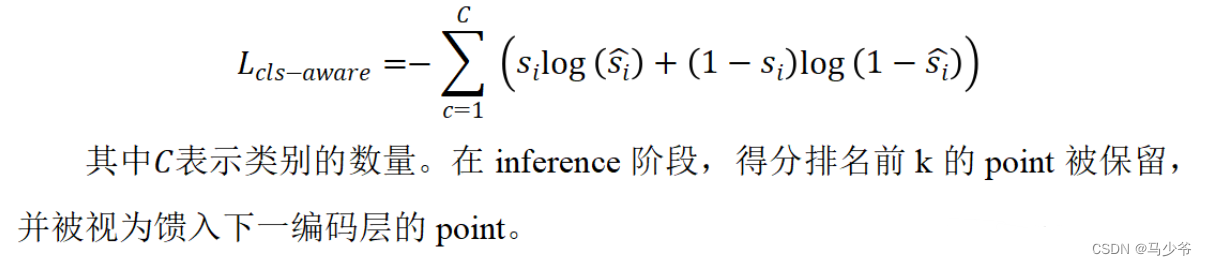
In this way, the loss function of the score can be changed to :
take soft point mask And foreground point Multiply the loss items of , Make the point close to the center have a higher probability . Be careful , stay inference The bounding box is no longer needed in the process , If the model is well trained , We just need to keep the highest score after sampling k A little bit .
After the detailed explanation of the above strategy , The comparison between our sampling strategy and other strategies is as follows :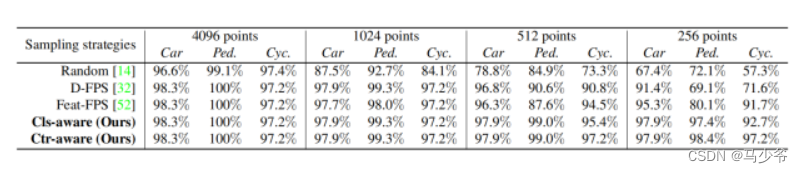
2.2 Contextual Instance Centroid Perception
We tried to use bounding box Surrounding contextual clues, such as centroid prediction . say concretely , We followed VoteNet To explicitly predict object Offset of center .( That is, aggregate operation , The following figure VoteNet Shown , Just use FPS Choose the k Then aggregate the surrounding points .)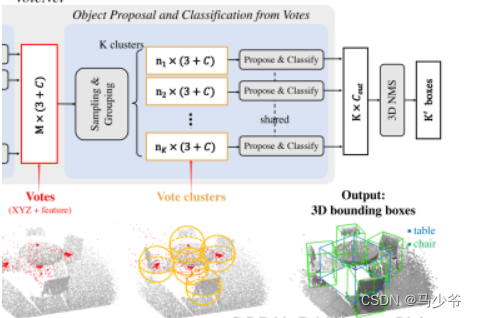
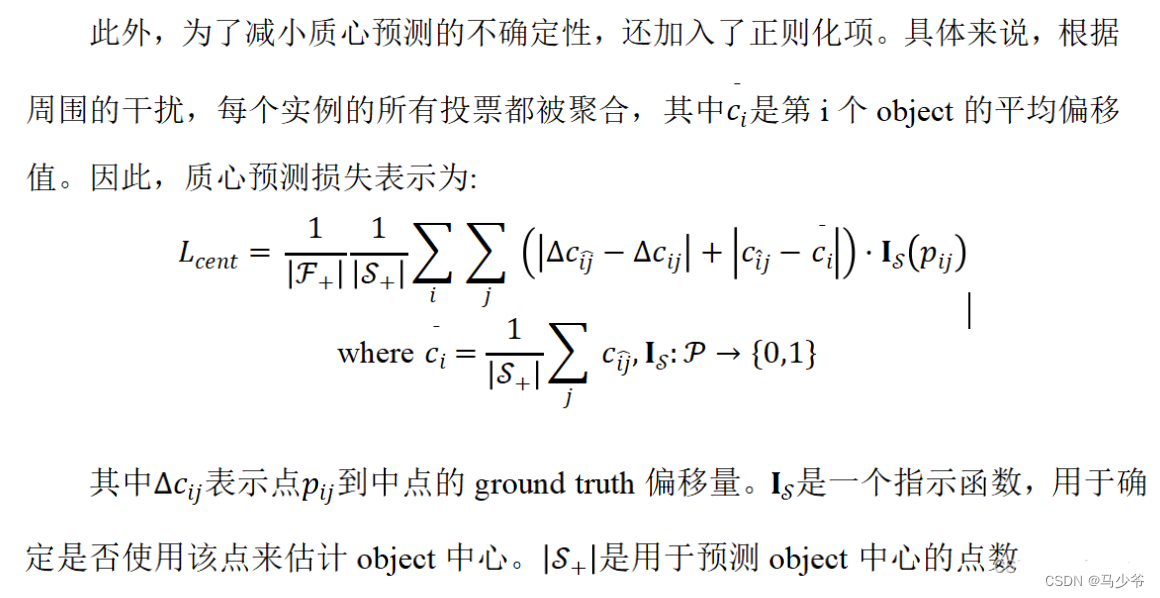
It is worth noting that , In this paper , We don't just use points in the bounding box or shift points to predict the center , We manually extend ground truth bounding box, Or enlarge the box proportionally , To cover more relevant context near the object . The offset is estimated by using the sampling points falling within the extended bounding box , Then offset .
2.3 Centroid-based Instance Aggregation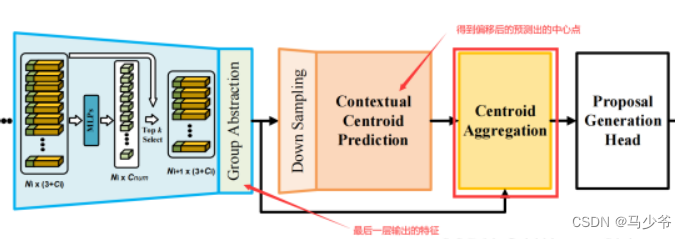
2.4 End-to-End Learning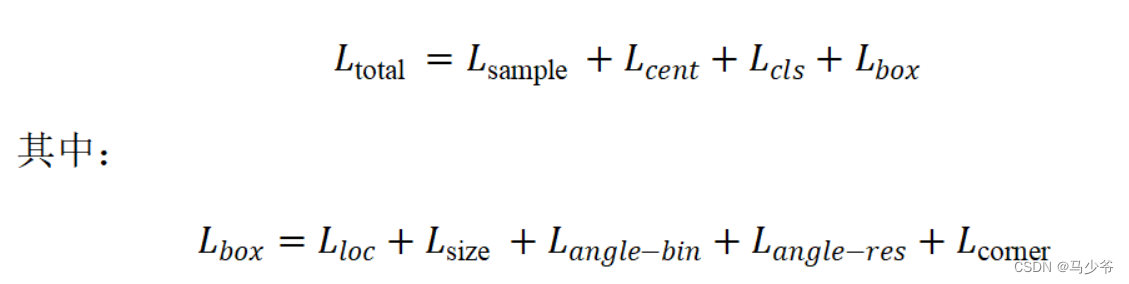
The method proposed in this paper has advantages in speed , The detection accuracy is still not achieved SOTA.
边栏推荐
- Jerry's ble exiting Bluetooth mode card machine [chapter]
- An error in SQL tuning advisor ora-00600: internal error code, arguments: [kesqsmakebindvalue:obj]
- Jerry's phonebook acquisition [chapter]
- HDU 4337 King Arthur's Knights 它输出一个哈密顿电路
- 迷失在MySQL的锁世界
- leetcode-02(链表题)
- 又一百万量子比特!以色列光量子初创公司完成1500万美元融资
- Shell programming basics
- [untitled]
- 知识图谱构建全流程
猜你喜欢
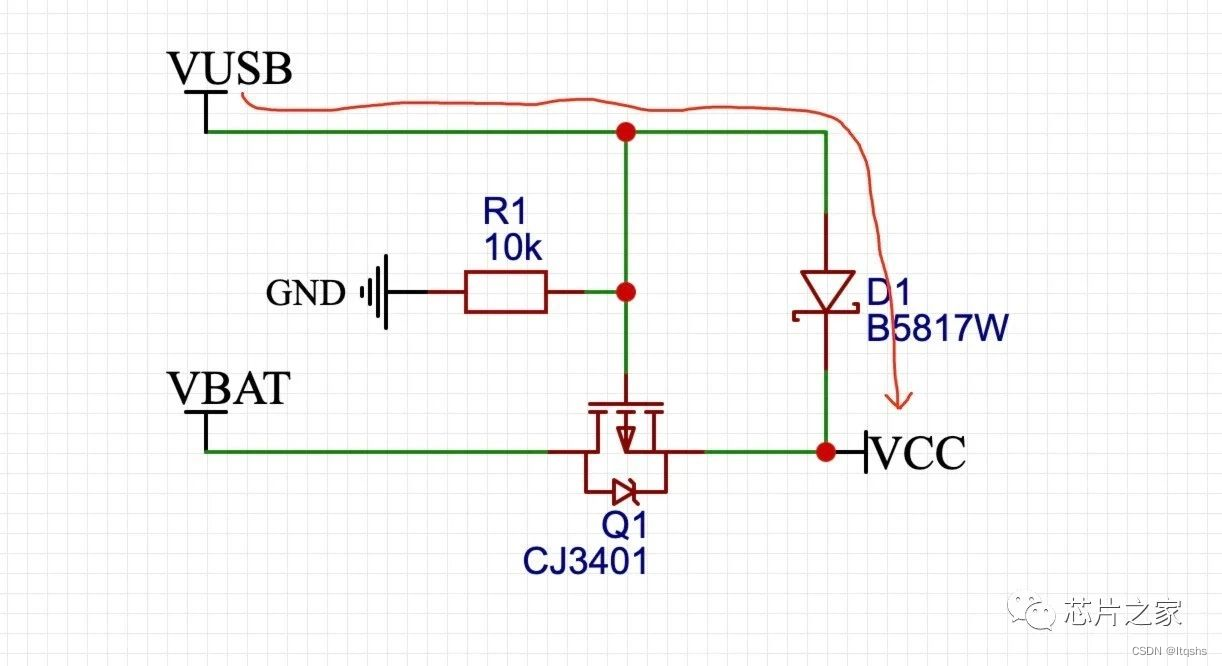
mos管实现主副电源自动切换电路,并且“零”压降,静态电流20uA
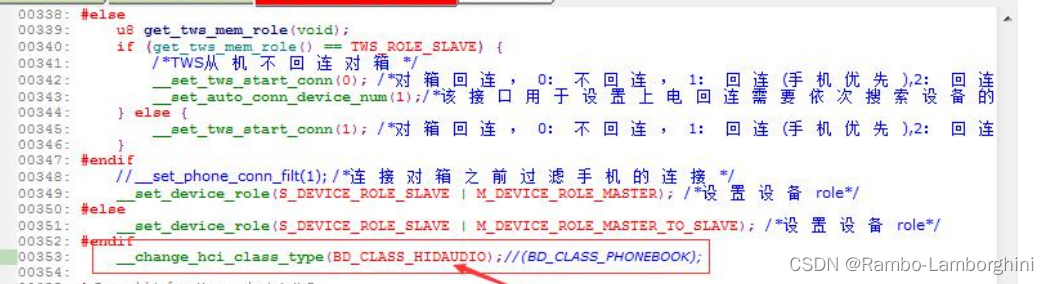
杰理之开启经典蓝牙 HID 手机的显示图标为键盘设置【篇】
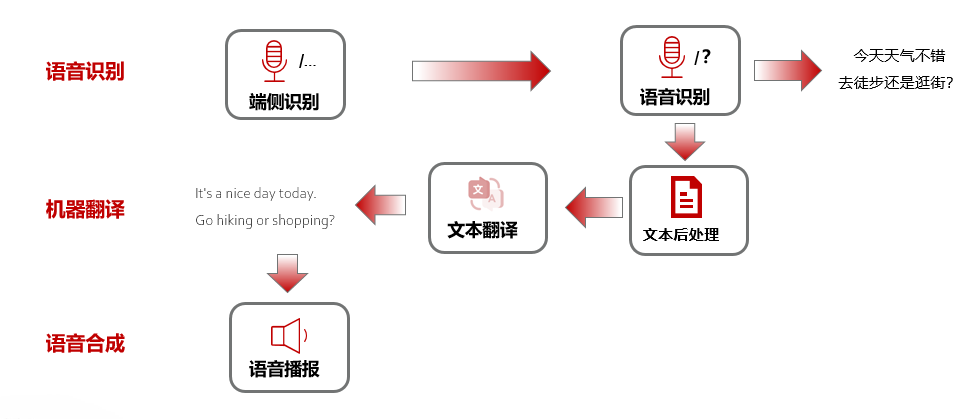
HMS Core 机器学习服务打造同传翻译新“声”态,AI让国际交流更顺畅

Do you know the five most prominent advantages of E-bidding?
centerX: 用中国特色社会主义的方式打开centernet

“去虚向实”大潮下,百度智能云向实而生

Flink task exit process and failover mechanism

“零售为王”下的家电产业:什么是行业共识?
CVPR 2022 best paper candidate | pip: six inertial sensors realize whole body dynamic capture and force estimation
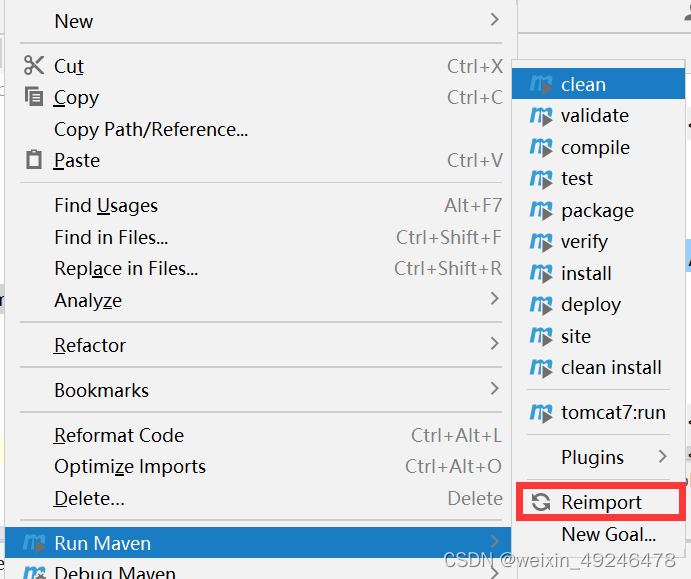
The solution of unable to create servlet file after idea restart
随机推荐
Matlab Error (Matrix dimensions must agree)
unrecognized selector sent to instance 0x10b34e810
Centerx: open centernet in the way of socialism with Chinese characteristics
Codeforces round 264 (Div. 2) C gargari and Bishop [violence]
Another million qubits! Israel optical quantum start-up company completed $15million financing
MOS transistor realizes the automatic switching circuit of main and auxiliary power supply, with "zero" voltage drop and static current of 20ua
Experience design details
树莓派设置wifi自动连接
应用程序启动速度的优化
源代码保密的意义和措施
Development of wireless communication technology, cv5200 long-distance WiFi module, UAV WiFi image transmission application
Lingyun going to sea | yidiantianxia & Huawei cloud: promoting the globalization of Chinese e-commerce enterprise brands
unrecognized selector sent to instance 0x10b34e810
杰理之关于 DAC 输出功率问题【篇】
HDU 4337 King Arthur's Knights 它输出一个哈密顿电路
商城商品的知识图谱构建
Appx代码签名指南
【无标题】
How-PIL-to-Tensor
Le tube MOS réalise le circuit de commutation automatique de l'alimentation principale et de l'alimentation auxiliaire, et la chute de tension "zéro", courant statique 20ua