当前位置:网站首页>CVPR 2022 best paper candidate | pip: six inertial sensors realize whole body dynamic capture and force estimation
CVPR 2022 best paper candidate | pip: six inertial sensors realize whole body dynamic capture and force estimation
2022-07-07 03:19:00 【Zhiyuan community】

Project home page :https://xinyu-yi.github.io/PIP/
Thesis link :https://arxiv.org/abs/2203.08528
Open source code :https://github.com/Xinyu-Yi/PIP
边栏推荐
- The whole process of knowledge map construction
- MOS transistor realizes the automatic switching circuit of main and auxiliary power supply, with "zero" voltage drop and static current of 20ua
- 树莓派设置wifi自动连接
- 杰理之开 BLE 退出蓝牙模式卡机问题【篇】
- Lingyun going to sea | yidiantianxia & Huawei cloud: promoting the globalization of Chinese e-commerce enterprise brands
- SSL证书错误怎么办?浏览器常见SSL证书报错解决办法
- Form validation of uniapp
- 存储过程与函数(MySQL)
- Install torch 0.4.1
- 函数重入、函数重载、函数重写自己理解
猜你喜欢
![[tools] basic concept of database and MySQL installation](/img/9c/626e42097050517a13a2ce7cdab1bb.jpg)
[tools] basic concept of database and MySQL installation
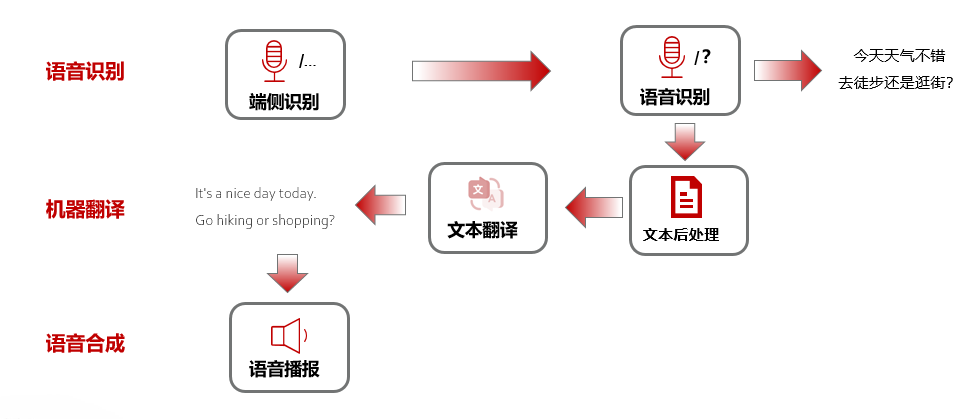
HMS core machine learning service creates a new "sound" state of simultaneous interpreting translation, and AI makes international exchanges smoother
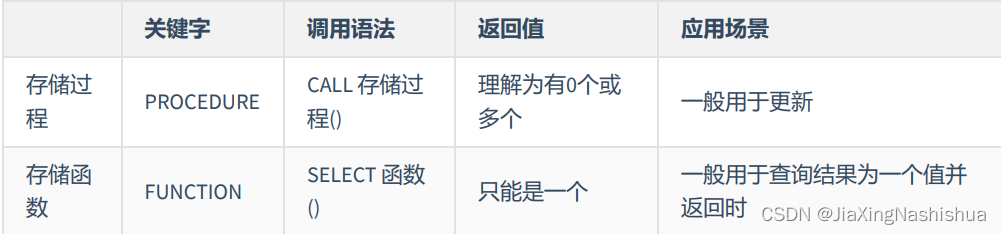
Stored procedures and functions (MySQL)
树莓派设置wifi自动连接
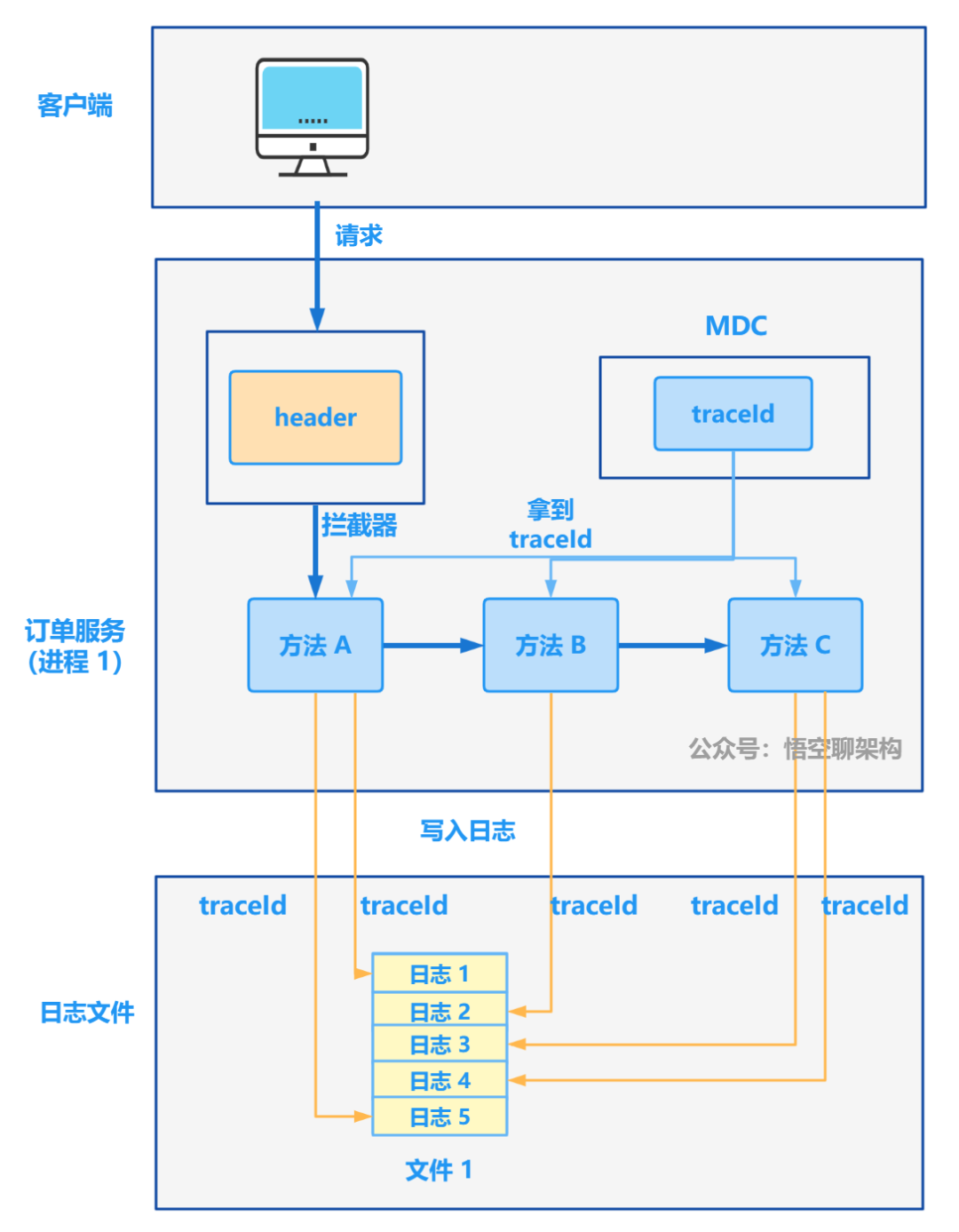
从 1.5 开始搭建一个微服务框架——日志追踪 traceId
Don't you know the relationship between JSP and servlet?
从0开始创建小程序
![[secretly kill little partner pytorch20 days] - [Day1] - [example of structured data modeling process]](/img/f0/79e7915ba3ef32aa21c4a1d5f486bd.jpg)
[secretly kill little partner pytorch20 days] - [Day1] - [example of structured data modeling process]
体会设计细节
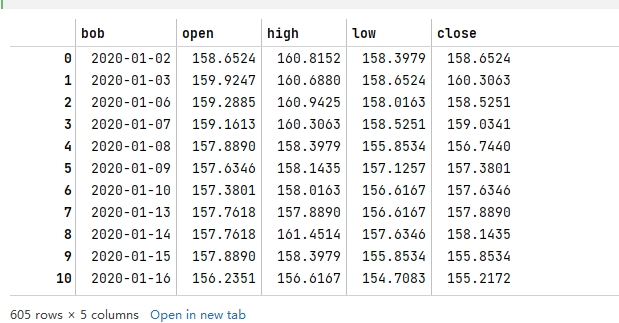
掘金量化:通过history方法获取数据,和新浪财经,雪球同用等比复权因子。不同于同花顺
随机推荐
input_delay
Do you know the five most prominent advantages of E-bidding?
How-PIL-to-Tensor
mos管實現主副電源自動切換電路,並且“零”壓降,靜態電流20uA
Use of promise in ES6
函数重入、函数重载、函数重写自己理解
Oauth2协议中如何对accessToken进行校验
The solution of unable to create servlet file after idea restart
房费制——登录优化
[Dameng database] after backup and recovery, two SQL statements should be executed
Change your posture to do operation and maintenance! GOPs 2022 Shenzhen station highlights first!
Leetcode-02 (linked list question)
装饰设计企业网站管理系统源码(含手机版源码)
unrecognized selector sent to instance 0x10b34e810
[untitled]
杰理之开 BLE 退出蓝牙模式卡机问题【篇】
Matlab Error (Matrix dimensions must agree)
unrecognized selector sent to instance 0x10b34e810
Nuggets quantification: obtain data through the history method, and use the same proportional compound weight factor as Sina Finance and snowball. Different from flush
leetcode