当前位置:网站首页>np. allclose
np. allclose
2022-07-05 08:58:00 【Wanderer001】
Reference resources np.allclose - cloud + Community - Tencent cloud
numpy Of allclose Method , Compare the two array Is every element equal , Default in 1e-05 Within the error range of
>>> help(np.allclose)
Help on function allclose in module numpy.core.numeric:
allclose(a, b, rtol=1e-05, atol=1e-08, equal_nan=False)
Returns True if two arrays are element-wise equal within a tolerance.
The tolerance values are positive, typically very small numbers. The
relative difference (`rtol` * abs(`b`)) and the absolute difference
`atol` are added together to compare against the absolute difference
between `a` and `b`.
If either array contains one or more NaNs, False is returned.
Infs are treated as equal if they are in the same place and of the same
sign in both arrays.
Parameters
----------
a, b : array_like
Input arrays to compare.
rtol : float
The relative tolerance parameter (see Notes).
atol : float
The absolute tolerance parameter (see Notes).
equal_nan : bool
Whether to compare NaN's as equal. If True, NaN's in `a` will be
considered equal to NaN's in `b` in the output array.
.. versionadded:: 1.10.0
Returns
-------
allclose : bool
Returns True if the two arrays are equal within the given
tolerance; False otherwise.
```边栏推荐
- Adaboost使用
- asp. Net (c)
- ORACLE进阶(三)数据字典详解
- Introduction Guide to stereo vision (4): DLT direct linear transformation of camera calibration [recommended collection]
- Mathematical modeling: factor analysis
- Summary and Reflection on issues related to seq2seq, attention and transformer in hands-on deep learning
- 生成对抗网络
- Ros-11 common visualization tools
- scipy.misc.imread()
- IT冷知识(更新ing~)
猜你喜欢

It cold knowledge (updating ing~)

我从技术到产品经理的几点体会
Hello everyone, welcome to my CSDN blog!
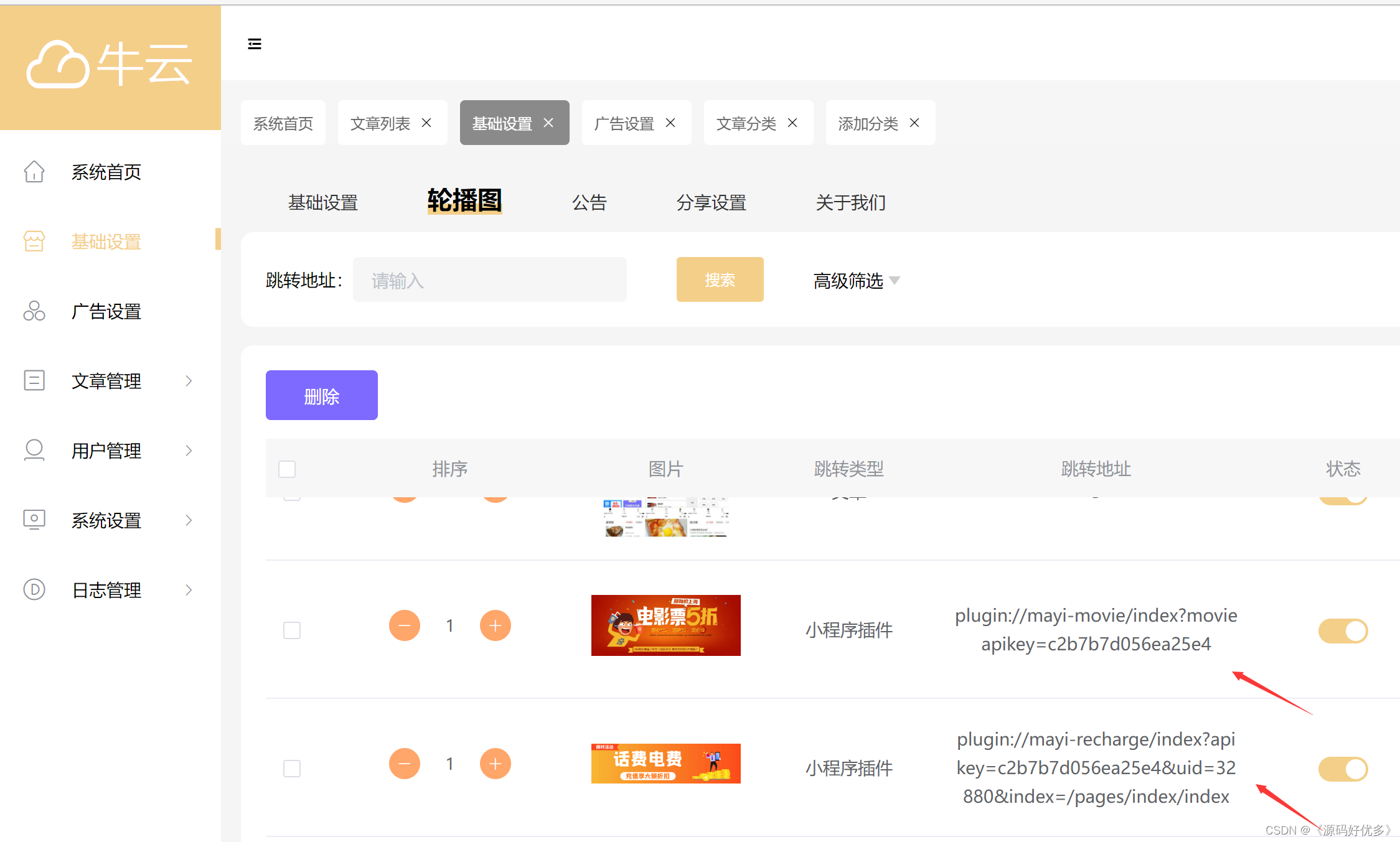
资源变现小程序添加折扣充值和折扣影票插件
Attention is all you need
![C [essential skills] use of configurationmanager class (use of file app.config)](/img/8b/e56f87c2d0fbbb1251ec01b99204a1.png)
C [essential skills] use of configurationmanager class (use of file app.config)
Add discount recharge and discount shadow ticket plug-ins to the resource realization applet
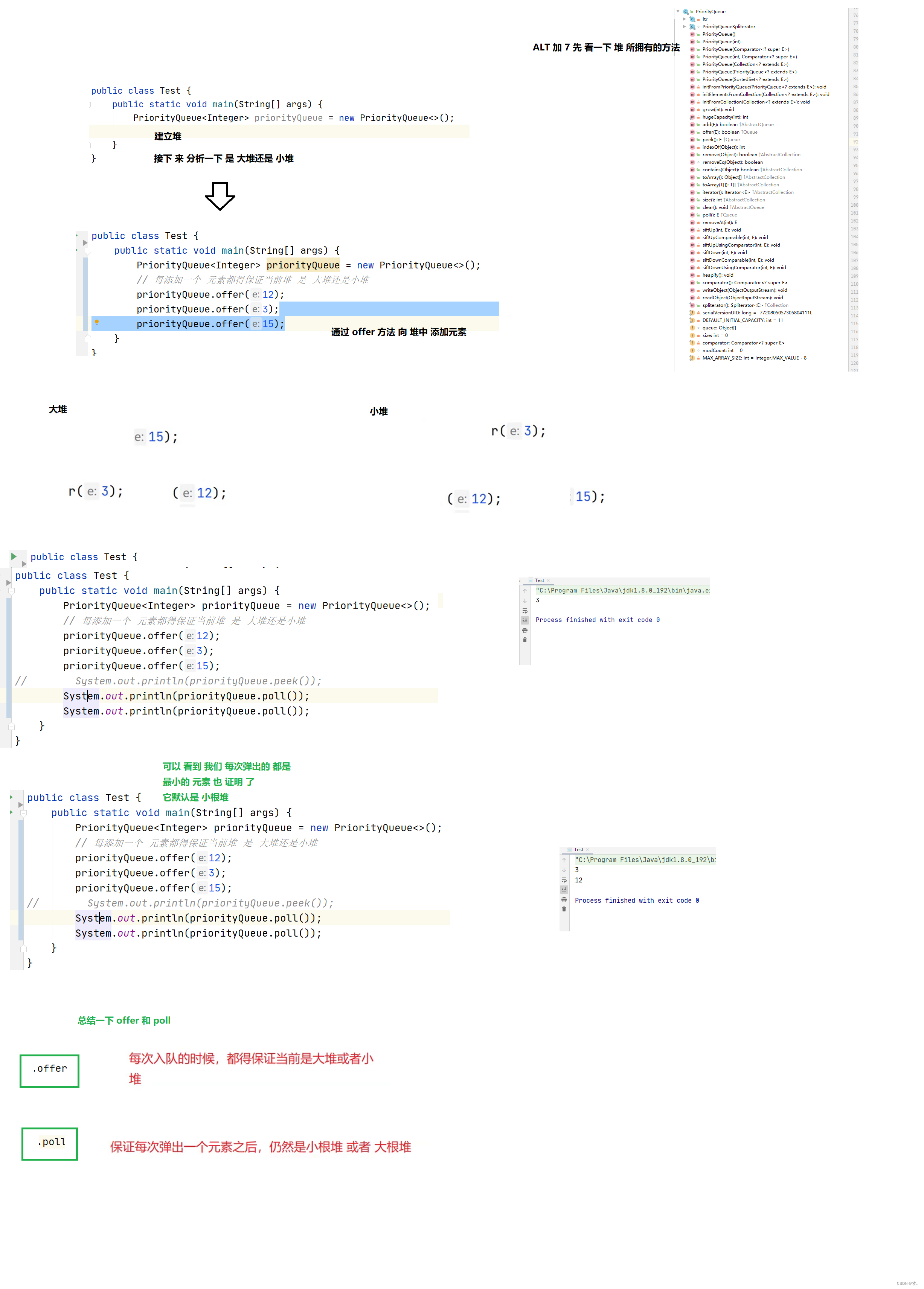
优先级队列(堆)
Understanding rotation matrix R from the perspective of base transformation
Halcon Chinese character recognition
随机推荐
Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]
迁移学习和域自适应
LLVM之父Chris Lattner:为什么我们要重建AI基础设施软件
520 diamond Championship 7-4 7-7 solution
Beautiful soup parsing and extracting data
嗨 FUN 一夏,与 StarRocks 一起玩转 SQL Planner!
IT冷知识(更新ing~)
Programming implementation of ROS learning 6 -service node
2020 "Lenovo Cup" National College programming online Invitational Competition and the third Shanghai University of technology programming competition
牛顿迭代法(解非线性方程)
Typescript hands-on tutorial, easy to understand
Attention is all you need
C#绘制带控制点的Bezier曲线,用于点阵图像及矢量图形
混淆矩阵(Confusion Matrix)
nodejs_ fs. writeFile
Use arm neon operation to improve memory copy speed
Add discount recharge and discount shadow ticket plug-ins to the resource realization applet
np.allclose
Ros-11 common visualization tools
Programming implementation of subscriber node of ROS learning 3 subscriber