当前位置:网站首页>Ros-10 roslaunch summary
Ros-10 roslaunch summary
2022-07-05 08:45:00 【m0_ forty-six million ninety-three thousand eight hundred and t】
One 、 Concept
Launch File is ROS Provided , You can run multiple nodes The file of .Launch The file is in a special XML Format to write , stay ROS packages Widely used in . Compare with rosrun, rosrun Only one can run node, roslaunch You can run multiple node, and roslaunch It will be detected before operation rosmaster Whether to start , If it is not started, it will start automatically .
Two 、 newly build launch file
launch The documents are usually in the form of .launch Suffix as file name , Put it in package Of launch Under the folder , Launch File is XML file .
3、 ... and 、launch Label in file
3.1 launch label
Every XML The file has to have a root element. and launch Of documents root element By a pair launch Tag definition .
<launch>
...
</launch>
Launch Others in the file elements Must be in this pair tags Between .
launch There is an attribute in the tag :deprecated=" Disclaimer ", It can be used to inform users of the current launch The document has been discarded
3.2 node label
launch The core of the document is a series node elements, Every node element Start a node.node element as follows :
<node pkg=”package_name” type=”executable_name” name=”node_name”/>
Every node All nodes are one rosrun. And each node Nodes must contain pkg,type,name Three attributes , You can also include output,respawn,required,ns Equal attribute .
1. attribute
pkg=" Package name " The package to which the node belongs
type="nodeType" Node type ( Executable file name with the same name , That is, if it is py Document rules file name .py, If it is cpp The file can be written directly to the executable file generated after compilation )
name="nodeName"
The name of the node ( stay ROS The name of the node in the network topology )
args="xxx xxx xxx" ( Optional ) : Pass parameters to node
machine=" machine name " : Start the node on the specified machine
respawn="true | false" ( Optional ): If the node exits , Whether to restart automatically
respawn_delay=" N" ( Optional ): If respawn by true, So delay N Start the node in seconds
required="true | false" ( Optional ): Whether the node must , If true, Then, if the node exits , Will kill the whole roslaunch
ns="xxx" ( Optional ): In the specified namespace xxx Start node , Namespace is ros Node prefix in network topology , This helps avoid node duplication
output="log | screen" ( Optional ): Log sending destination , It can be set to log Log files , or screen The screen , The default is log
2. Child labels
env Environment variable Settings
remap Remap node name
rosparam Parameter setting
param Parameter setting
The use of child labels will be introduced later
3.3 include label
include Tags can be imported into another launch File to current file , Be similar to C The language header file contains .
Usage is as follows :
1. attribute
file="$(find Package name )/xxx/xxx.launch": File path to include
ns="xxx" ( Optional ): Import the file in the specified namespace
The specific use :
<include file="$(find pckname)/launch/filename.launch" />2. Child labels
env Environment variable Settings
arg Pass parameters to the included file
3.4 remap label
Remap : For renaming topics , Sometimes, no matter it is ros The topics provided by the system are still self-defined topics , The topic name has been fixed . meanwhile ros The system or its own defined subscribers , The name of the subscription has been written . However, sometimes the topic subscribed by subscribers is inconsistent with the topic name published by publishers , It can be used at this time remap Remapping topic names . You can choose to remap the topic name published by the publisher or the topic subscribed by the subscriber .
1. attribute
from="xxx": Original topic name
to="yyy": Target name
<remap from=:" Topic name with namespace " to =" New words title "
2. Child labels
nothing
for example
<node pkg="turtlesim" type="turtlesim_node" name="my_turtle" output="screen">
<remap from "/turtle/cmd" to="/cmd_vel"/>
</node>1, When remap and node Parallel time ,from and to It can be for launch Any node in the file .
2, When remap When inside a node ,from Must be defined for the current node ,to It can be launch Any node in the file .
3.5 param label
<param> The tag is mainly used to set parameters on the parameter server
1. attribute
name=" Namespace / Parameter name "
Parameter name , Can contain namespaces
value="xxx" ( Optional )
Define parameter values , If omitted here , You must specify an external file as the parameter source
type="str | int | double | bool | yaml" ( Optional )
Specify parameter type , If not specified ,roslaunch Will try to determine the parameter type , The following rules :
If you include '.' The number of is not parsed as a floating point type , Otherwise, it is an integer
"true" and "false" yes bool value ( Case insensitive )
Others are strings
2. Child labels
- nothing
param Tags can be in node Labels can also be used in node Use outside the label , But it should be noted that if in node Use in label param Set parameters , Then the declared parameters are parameters in the private namespace .( Is there anything special about the parameters of private namespaces ? Other nodes cannot be changed ?)
<launch>
<param name=param_A" type="int" value="4" />
<node pkg="turtlesim tyoe="turtlesim_node" name="my_turtle" output="screen">
<param name=param_B" type="double" value="3.14" />
</node>
<node pkg="turtlesim tyoe="turtle_teleop_key" name="my_key" output="screen"/>
</launch>
3.6 rosparam label
<param> The tag is mainly used to set parameters on the parameter server ,<rosparam> Labels can be from YAML File import parameters , Or export parameters to YAML file , It can also be used to delete parameters ,<rosparam> Tag in <node> Label is treated as private .
1. attribute
command="load | dump | delete" ( Optional , Default load)
load 、 Export or delete parameters
file="$(find xxxxx)/xxx/yyy...."
Loaded or exported to yaml file
param=" Parameter name "
ns=" Namespace " ( Optional )
2. Child labels
- nothing
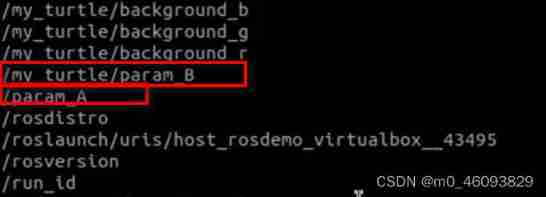
example 1 from .yaml Load parameters in the file
<launch>
<param name=param_A" type="int" value="4" />
<rosparam command="load" file="$(find launch_basic)/launch/params.yaml"/>
<node pkg="turtlesim tyoe="turtlesim_node" name="my_turtle" output="screen">
<param name=param_B" type="double" value="3.14" />
<rosparam command="load" file="$(find launch_basic)/launch/params.yaml"/>
</node>
<node pkg="turtlesim tyoe="turtle_teleop_key" name="my_key" output="screen"/>
</launch>
rosparam Tags can be in node It can also be used in the label node Use outside the label , But it should be noted that if in node Use in label rosparam Set parameters , Then the declared parameters are parameters in the private namespace .
example 2 Export the currently active parameters to .yaml file
It should be noted that ,rosparam Whether in the node Is still in the label of node Out of label ,ros The system will execute this tag first . So if you want to export active parameters in the current system , You need to build another .launch file .
<rosparam command="dump" file="$(find pckname)/launch/params_out.yaml"/>
example 3 Delete the currently active parameter
<rosparam command=""delete" param=" Parameter name " />3.7 group label
<group> Tags can group nodes , have ns attribute , Nodes can belong to a namespace
1. attribute
ns=" The name space " ( Optional )
clear_params="true | false" ( Optional )
Before startup , Delete all parameters of the group namespace ( Use with caution .... This function is dangerous )
2. Child labels
- except launch Labels other than labels
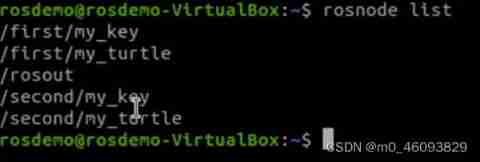
<launch>
<group ns="first">
<node pkg="turtlrsim" type="turtlesim_node" name="my_turtle" output="screen"/>
<node pkg="turtlrsim" type="turtle_teleop_key" name="my_key" output="screen"/>
</group>
<group ns="second">
<node pkg="turtlrsim" type="turtlesim_node" name="my_turtle" output="screen"/>
<node pkg="turtlrsim" type="turtle_teleop_key" name="my_key" output="screen"/>
</group>
You can see two groups node The nodes are exactly the same , But the runtime will not report an error , Because the namespace is different .
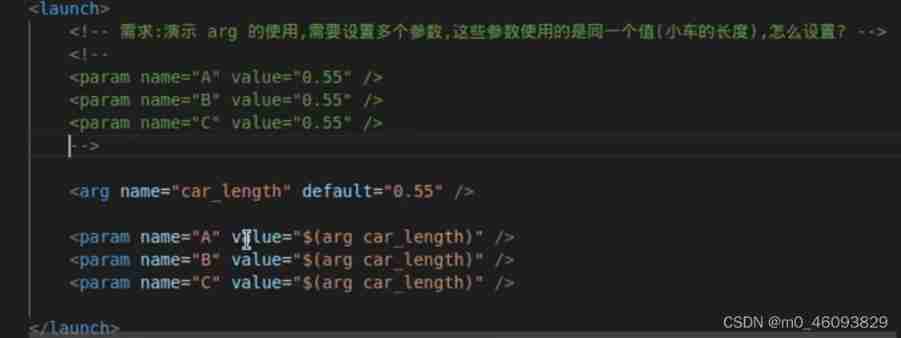
3.8 arg label
<arg> The label is used for Dynamic transfer parameters , Similar to function macro definition , Can enhance launch Flexibility of documents
1. attribute
name=" Parameter name "
default=" The default value is " ( Optional )
value=" The number " ( Optional ) : You can't be with default Coexist
doc=" describe ": Parameter description
2. Child labels
- nothing
For example, there is a length parameter , Several variables are used . At this time, I can define macros , Then call this macro parameter directly when assigning values to variables .
Four 、 function launch file
Before operation source once :source devel/setup.bash
Then run the following command :
roslaunch pckname filename.launchReference resources :4.2.8 launch Document label arg · Autolabor-ROS Introduction to Robotics 《ROS Theory and practice 》 Zero basic course
边栏推荐
- Xrosstools tool installation for X-Series
- MATLAB skills (28) Fuzzy Comprehensive Evaluation
- Basic number theory -- Euler function
- Reasons for the insecurity of C language standard function scanf
- Arduino operation stm32
- Yolov4 target detection backbone
- kubeadm系列-02-kubelet的配置和启动
- Halcon: check of blob analysis_ Blister capsule detection
- 319. Bulb switch
- Arduino burning program and Arduino burning bootloader
猜你喜欢

Numpy 小坑:维度 (n, 1) 和 维度 (n, ) 数组相加运算后维度变为 (n, n)

猜谜语啦(3)
Apaas platform of TOP10 abroad

猜谜语啦(142)
Guess riddles (9)
Mathematical modeling: factor analysis
Bluebridge cup internet of things basic graphic tutorial - GPIO input key control LD5 on and off

Halcon clolor_ pieces. Hedv: classifier_ Color recognition

Solutions of ordinary differential equations (2) examples
C# LINQ源码分析之Count
随机推荐
多元线性回归(梯度下降法)
皮尔森相关系数
某公司文件服务器迁移方案
Apaas platform of TOP10 abroad
Affected tree (tree DP)
An enterprise information integration system
LLVM之父Chris Lattner:为什么我们要重建AI基础设施软件
Classification of plastic surgery: short in long long long
2022.7.4-----leetcode.1200
Latex improve
ABC#237 C
location search 属性获取登录用户名
C language data type replacement
图解八道经典指针笔试题
Guess riddles (3)
696. Count binary substring
Reasons for the insecurity of C language standard function scanf
PIP installation
Old Wang's esp8266 and old Wu's ws2818 light strip
Infix expression evaluation