当前位置:网站首页>Yolov5 project based on QT
Yolov5 project based on QT
2022-07-03 03:13:00 【AphilGuo】
Yolov5Qt engineering
main.cpp
#include "mainwindow.h"
#include <QApplication>
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
}
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainWindow)
{
ui->setupUi(this);
setWindowTitle(QStringLiteral("YoloV5 Target detection software "));
timer = new QTimer(this);
timer->setInterval(33);
connect(timer,SIGNAL(timeout()),this,SLOT(readFrame()));
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(false);
Init();
}
MainWindow::~MainWindow()
{
capture->release();
delete capture;
delete [] yolo_nets;
delete yolov5;
delete ui;
}
void MainWindow::Init()
{
capture = new cv::VideoCapture();
yolo_nets = new NetConfig[4]{
{
0.5, 0.5, 0.5, "yolov5s"},
{
0.6, 0.6, 0.6, "yolov5m"},
{
0.65, 0.65, 0.65, "yolov5l"},
{
0.75, 0.75, 0.75, "yolov5x"}
};
conf = yolo_nets[0];
yolov5 = new YOLOV5();
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral(" Default model category :yolov5s args: %1 %2 %3")
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
void MainWindow::readFrame()
{
cv::Mat frame;
capture->read(frame);
if (frame.empty()) return;
auto start = std::chrono::steady_clock::now();
yolov5->detect(frame);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
cv::cvtColor(frame, frame, cv::COLOR_BGR2RGB);
QImage rawImage = QImage((uchar*)(frame.data),frame.cols,frame.rows,frame.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(rawImage));
}
void MainWindow::on_openfile_clicked()
{
QString filename = QFileDialog::getOpenFileName(this,QStringLiteral(" Open file "),".","*.mp4 *.avi;;*.png *.jpg *.jpeg *.bmp");
if(!QFile::exists(filename)){
return;
}
ui->statusbar->showMessage(filename);
QMimeDatabase db;
QMimeType mime = db.mimeTypeForFile(filename);
if (mime.name().startsWith("image/")) {
cv::Mat src = cv::imread(filename.toLatin1().data());
if(src.empty()){
ui->statusbar->showMessage(" Image does not exist !");
return;
}
cv::Mat temp;
if(src.channels()==4)
cv::cvtColor(src,temp,cv::COLOR_BGRA2RGB);
else if (src.channels()==3)
cv::cvtColor(src,temp,cv::COLOR_BGR2RGB);
else
cv::cvtColor(src,temp,cv::COLOR_GRAY2RGB);
auto start = std::chrono::steady_clock::now();
yolov5->detect(temp);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
QImage img = QImage((uchar*)(temp.data),temp.cols,temp.rows,temp.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(img));
ui->label->resize(ui->label->pixmap()->size());
filename.clear();
}else if (mime.name().startsWith("video/")) {
capture->open(filename.toLatin1().data());
if (!capture->isOpened()){
ui->textEditlog->append("fail to open MP4!");
return;
}
IsDetect_ok +=1;
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
ui->textEditlog->append(QString::fromUtf8("Open video: %1 succesfully!").arg(filename));
// Get the whole number of frames QStringLiteral
long totalFrame = capture->get(cv::CAP_PROP_FRAME_COUNT);
int width = capture->get(cv::CAP_PROP_FRAME_WIDTH);
int height = capture->get(cv::CAP_PROP_FRAME_HEIGHT);
ui->textEditlog->append(QStringLiteral(" The whole video is %1 frame , wide =%2 high =%3 ").arg(totalFrame).arg(width).arg(height));
ui->label->resize(QSize(width, height));
// Set the start frame ()
long frameToStart = 0;
capture->set(cv::CAP_PROP_POS_FRAMES, frameToStart);
ui->textEditlog->append(QStringLiteral(" From %1 Frame start reading ").arg(frameToStart));
// Get frame rate
double rate = capture->get(cv::CAP_PROP_FPS);
ui->textEditlog->append(QStringLiteral(" The frame rate is : %1 ").arg(rate));
}
}
void MainWindow::on_loadfile_clicked()
{
QString onnxFile = QFileDialog::getOpenFileName(this,QStringLiteral(" Choose a model "),".","*.onnx");
if(!QFile::exists(onnxFile)){
return;
}
ui->statusbar->showMessage(onnxFile);
if (!yolov5->loadModel(onnxFile.toLatin1().data())){
ui->textEditlog->append(QStringLiteral(" Failed to load model !"));
return;
}
IsDetect_ok +=1;
ui->textEditlog->append(QString::fromUtf8("Open onnxFile: %1 succesfully!").arg(onnxFile));
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
}
void MainWindow::on_startdetect_clicked()
{
timer->start();
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(true);
ui->openfile->setEnabled(false);
ui->loadfile->setEnabled(false);
ui->comboBox->setEnabled(false);
ui->textEditlog->append(QStringLiteral("=======================\n"
" Start detection \n"
"=======================\n"));
}
void MainWindow::on_stopdetect_clicked()
{
ui->startdetect->setEnabled(true);
ui->stopdetect->setEnabled(false);
ui->openfile->setEnabled(true);
ui->loadfile->setEnabled(true);
ui->comboBox->setEnabled(true);
timer->stop();
ui->textEditlog->append(QStringLiteral("======================\n"
" Stop testing \n"
"======================\n"));
}
void MainWindow::on_comboBox_activated(const QString &arg1)
{
if (arg1.contains("s")){
conf = yolo_nets[0];
}else if (arg1.contains("m")) {
conf = yolo_nets[1];
}else if (arg1.contains("l")) {
conf = yolo_nets[2];
}else if (arg1.contains("x")) {
conf = yolo_nets[3];}
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral(" Use model categories :%1 args: %2 %3 %4")
.arg(arg1)
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
yolov5.h
#ifndef YOLOV5_H
#define YOLOV5_H
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <opencv2/core/cuda.hpp>
#include <fstream>
#include <sstream>
#include <iostream>
#include <exception>
#include <QMessageBox>
struct NetConfig
{
float confThreshold; // class Confidence threshold
float nmsThreshold; // Non-maximum suppression threshold
float objThreshold; //Object Confidence threshold
std::string netname;
};
class YOLOV5
{
public:
YOLOV5(){
} // Constructors
void Initialization(NetConfig conf);
bool loadModel(const char* onnxfile);
void detect(cv::Mat& frame);
private:
const float anchors[3][6] = {
{
10.0, 13.0, 16.0, 30.0, 33.0, 23.0}, {
30.0, 61.0, 62.0, 45.0, 59.0, 119.0},{
116.0, 90.0, 156.0, 198.0, 373.0, 326.0}};
const float stride[3] = {
8.0, 16.0, 32.0 };
std::string classes[80] = {
"person", "bicycle", "car", "motorbike", "aeroplane", "bus",
"train", "truck", "boat", "traffic light", "fire hydrant",
"stop sign", "parking meter", "bench", "bird", "cat", "dog",
"horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe",
"backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat",
"baseball glove", "skateboard", "surfboard", "tennis racket",
"bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl",
"banana", "apple", "sandwich", "orange", "broccoli", "carrot",
"hot dog", "pizza", "donut", "cake", "chair", "sofa", "pottedplant",
"bed", "diningtable", "toilet", "tvmonitor", "laptop", "mouse",
"remote", "keyboard", "cell phone", "microwave", "oven", "toaster",
"sink", "refrigerator", "book", "clock", "vase", "scissors",
"teddy bear", "hair drier", "toothbrush"};
const int inpWidth = 640;
const int inpHeight = 640;
float confThreshold;
float nmsThreshold;
float objThreshold;
//========= test =========
std::vector<int> blob_sizes{
1, 3, 640, 640};
cv::Mat blob = cv::Mat(blob_sizes, CV_32FC1, cv::Scalar(0.0));
//========== pro ========
//cv::Mat blob;
std::vector<cv::Mat> outs;
std::vector<int> classIds;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
std::vector<int> indices;
cv::dnn::Net net;
void drawPred(int classId, float conf, int left, int top, int right, int bottom, cv::Mat& frame);
void sigmoid(cv::Mat* out, int length);
};
static inline float sigmoid_x(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
#endif // YOLOV5_H
yolov5.cpp
#include "yolov5.h"
using namespace std;
using namespace cv;
void YOLOV5::Initialization(NetConfig conf)
{
this->confThreshold = conf.confThreshold;
this->nmsThreshold = conf.nmsThreshold;
this->objThreshold = conf.objThreshold;
classIds.reserve(20);
confidences.reserve(20);
boxes.reserve(20);
outs.reserve(3);
indices.reserve(20);
}
bool YOLOV5::loadModel(const char *onnxfile)
{
// try {
// this->net = cv::dnn::readNetFromONNX(onnxfile);
// int device_no = cv::cuda::getCudaEnabledDeviceCount();
// if (device_no==1){
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// }else{
// QMessageBox::information(NULL,"warning",QStringLiteral(" Being used CPU Reasoning !\n"),QMessageBox::Yes,QMessageBox::Yes);
// }
// return true;
// } catch (exception& e) {
// QMessageBox::critical(NULL,"Error",QStringLiteral(" Error loading model , Please check and try again !\n %1").arg(e.what()),QMessageBox::Yes,QMessageBox::Yes);
// return false;
// }
this->net = cv::dnn::readNetFromONNX(onnxfile);
this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_DEFAULT);
this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// if(1 == cv::cuda::getCudaEnabledDeviceCount()){
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// }
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_DEFAULT);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_INFERENCE_ENGINE);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
}
void YOLOV5::detect(cv::Mat &frame)
{
cv::dnn::blobFromImage(frame, blob, 1 / 255.0, Size(this->inpWidth, this->inpHeight), Scalar(0, 0, 0), true, false);
this->net.setInput(blob);
this->net.forward(outs, this->net.getUnconnectedOutLayersNames());
/generate proposals
classIds.clear();
confidences.clear();
boxes.clear();
float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth;
int n = 0, q = 0, i = 0, j = 0, nout = 8 + 5, c = 0;
for (n = 0; n < 3; n++) /// scale
{
int num_grid_x = (int)(this->inpWidth / this->stride[n]);
int num_grid_y = (int)(this->inpHeight / this->stride[n]);
int area = num_grid_x * num_grid_y;
this->sigmoid(&outs[n], 3 * nout * area);
for (q = 0; q < 3; q++) ///anchor Count
{
const float anchor_w = this->anchors[n][q * 2];
const float anchor_h = this->anchors[n][q * 2 + 1];
float* pdata = (float*)outs[n].data + q * nout * area;
for (i = 0; i < num_grid_y; i++)
{
for (j = 0; j < num_grid_x; j++)
{
float box_score = pdata[4 * area + i * num_grid_x + j];
if (box_score > this->objThreshold)
{
float max_class_socre = 0, class_socre = 0;
int max_class_id = 0;
for (c = 0; c < 80; c++) get max socre
{
class_socre = pdata[(c + 5) * area + i * num_grid_x + j];
if (class_socre > max_class_socre)
{
max_class_socre = class_socre;
max_class_id = c;
}
}
if (max_class_socre > this->confThreshold)
{
float cx = (pdata[i * num_grid_x + j] * 2.f - 0.5f + j) * this->stride[n]; ///cx
float cy = (pdata[area + i * num_grid_x + j] * 2.f - 0.5f + i) * this->stride[n]; ///cy
float w = powf(pdata[2 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_w; ///w
float h = powf(pdata[3 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_h; ///h
int left = (cx - 0.5*w)*ratiow;
int top = (cy - 0.5*h)*ratioh; /// Restore the coordinates to the original drawing
classIds.push_back(max_class_id);
confidences.push_back(max_class_socre);
boxes.push_back(Rect(left, top, (int)(w*ratiow), (int)(h*ratioh)));
}
}
}
}
}
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
indices.clear();
cv::dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
this->drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame);
}
}
void YOLOV5::drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat &frame)
{
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255), 3);
string label = format("%.2f", conf);
label = this->classes[classId] + ":" + label;
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);
}
void YOLOV5::sigmoid(Mat *out, int length)
{
float* pdata = (float*)(out->data);
int i = 0;
for (i = 0; i < length; i++)
{
pdata[i] = 1.0 / (1 + expf(-pdata[i]));
}
}
边栏推荐
- 敏捷认证(Professional Scrum Master)模拟练习题
- Hi3536C V100R001C02SPC040 交叉编译器安装
- MySQL Real combat 45 [SQL query and Update Execution Process]
- Le processus de connexion mysql avec docker
- The file marked by labelme is converted to yolov5 format
- Segmentation fault occurs during VFORK execution
- 解决高并发下System.currentTimeMillis卡顿
- 函数栈帧的创建与销毁
- VS 2019安装及配置opencv
- 【富瀚6630编码存录像,用rtsp服务器及时间戳同步实现vlc观看录像】
猜你喜欢

The idea setting code is in UTF-8 idea Properties configuration file Chinese garbled
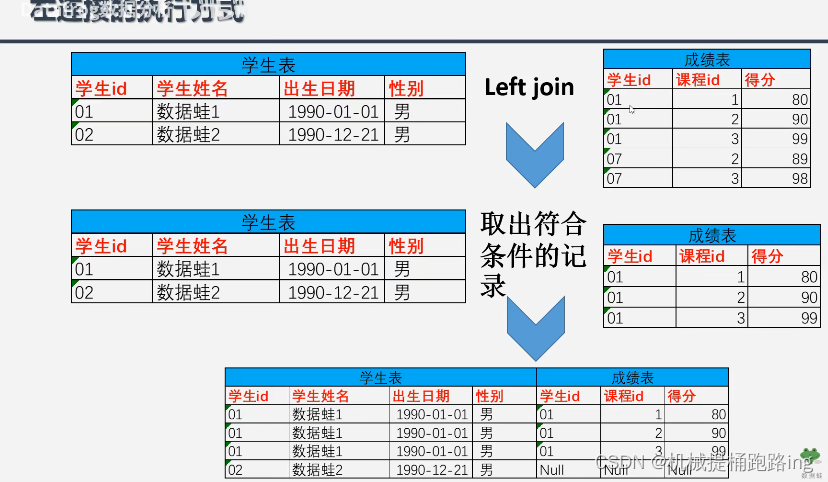
Left connection, inner connection

MySql实战45讲【事务隔离】

从C到Capable-----利用指针作为函数参数求字符串是否为回文字符

Le processus de connexion mysql avec docker

函数栈帧的创建与销毁
左连接,内连接

TCP 三次握手和四次挥手机制,TCP为什么要三次握手和四次挥手,TCP 连接建立失败处理机制

迅雷chrome扩展插件造成服务器返回的数据js解析页面数据异常
MySQL practice 45 lecture [transaction isolation]
随机推荐
Force freeing memory in PHP
Practice of traffic recording and playback in vivo
Notifydatasetchanged not applicable to recyclerview - notifydatasetchanged not working on recyclerview
Vs 2019 configuration du moteur de génération de tensorrt
Super easy to use logzero
I2C 子系統(四):I2C debug
I2C subsystem (II): I3C spec
用docker 连接mysql的过程
内存泄漏工具VLD安装及使用
基于QT的tensorRT加速的yolov5
Thunderbolt Chrome extension caused the data returned by the server JS parsing page data exception
Edit and preview in the back pipe to get the value writing method of the form
PAT乙级常用函数用法总结
左连接,内连接
模型转换onnx2engine
Deep learning: multi-layer perceptron and XOR problem (pytoch Implementation)
Introduction to cron expression
力扣------网格中的最小路径代价
Kubernetes family container housekeeper pod online Q & A?
【富瀚6630编码存录像,用rtsp服务器及时间戳同步实现vlc观看录像】