当前位置:网站首页>基于Qt的yolov5工程
基于Qt的yolov5工程
2022-07-03 03:06:00 【AphilGuo】
Yolov5Qt工程
main.cpp
#include "mainwindow.h"
#include <QApplication>
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
}
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainWindow)
{
ui->setupUi(this);
setWindowTitle(QStringLiteral("YoloV5目标检测软件"));
timer = new QTimer(this);
timer->setInterval(33);
connect(timer,SIGNAL(timeout()),this,SLOT(readFrame()));
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(false);
Init();
}
MainWindow::~MainWindow()
{
capture->release();
delete capture;
delete [] yolo_nets;
delete yolov5;
delete ui;
}
void MainWindow::Init()
{
capture = new cv::VideoCapture();
yolo_nets = new NetConfig[4]{
{
0.5, 0.5, 0.5, "yolov5s"},
{
0.6, 0.6, 0.6, "yolov5m"},
{
0.65, 0.65, 0.65, "yolov5l"},
{
0.75, 0.75, 0.75, "yolov5x"}
};
conf = yolo_nets[0];
yolov5 = new YOLOV5();
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral("默认模型类别:yolov5s args: %1 %2 %3")
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
void MainWindow::readFrame()
{
cv::Mat frame;
capture->read(frame);
if (frame.empty()) return;
auto start = std::chrono::steady_clock::now();
yolov5->detect(frame);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
cv::cvtColor(frame, frame, cv::COLOR_BGR2RGB);
QImage rawImage = QImage((uchar*)(frame.data),frame.cols,frame.rows,frame.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(rawImage));
}
void MainWindow::on_openfile_clicked()
{
QString filename = QFileDialog::getOpenFileName(this,QStringLiteral("打开文件"),".","*.mp4 *.avi;;*.png *.jpg *.jpeg *.bmp");
if(!QFile::exists(filename)){
return;
}
ui->statusbar->showMessage(filename);
QMimeDatabase db;
QMimeType mime = db.mimeTypeForFile(filename);
if (mime.name().startsWith("image/")) {
cv::Mat src = cv::imread(filename.toLatin1().data());
if(src.empty()){
ui->statusbar->showMessage("图像不存在!");
return;
}
cv::Mat temp;
if(src.channels()==4)
cv::cvtColor(src,temp,cv::COLOR_BGRA2RGB);
else if (src.channels()==3)
cv::cvtColor(src,temp,cv::COLOR_BGR2RGB);
else
cv::cvtColor(src,temp,cv::COLOR_GRAY2RGB);
auto start = std::chrono::steady_clock::now();
yolov5->detect(temp);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
QImage img = QImage((uchar*)(temp.data),temp.cols,temp.rows,temp.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(img));
ui->label->resize(ui->label->pixmap()->size());
filename.clear();
}else if (mime.name().startsWith("video/")) {
capture->open(filename.toLatin1().data());
if (!capture->isOpened()){
ui->textEditlog->append("fail to open MP4!");
return;
}
IsDetect_ok +=1;
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
ui->textEditlog->append(QString::fromUtf8("Open video: %1 succesfully!").arg(filename));
//获取整个帧数QStringLiteral
long totalFrame = capture->get(cv::CAP_PROP_FRAME_COUNT);
int width = capture->get(cv::CAP_PROP_FRAME_WIDTH);
int height = capture->get(cv::CAP_PROP_FRAME_HEIGHT);
ui->textEditlog->append(QStringLiteral("整个视频共 %1 帧, 宽=%2 高=%3 ").arg(totalFrame).arg(width).arg(height));
ui->label->resize(QSize(width, height));
//设置开始帧()
long frameToStart = 0;
capture->set(cv::CAP_PROP_POS_FRAMES, frameToStart);
ui->textEditlog->append(QStringLiteral("从第 %1 帧开始读").arg(frameToStart));
//获取帧率
double rate = capture->get(cv::CAP_PROP_FPS);
ui->textEditlog->append(QStringLiteral("帧率为: %1 ").arg(rate));
}
}
void MainWindow::on_loadfile_clicked()
{
QString onnxFile = QFileDialog::getOpenFileName(this,QStringLiteral("选择模型"),".","*.onnx");
if(!QFile::exists(onnxFile)){
return;
}
ui->statusbar->showMessage(onnxFile);
if (!yolov5->loadModel(onnxFile.toLatin1().data())){
ui->textEditlog->append(QStringLiteral("加载模型失败!"));
return;
}
IsDetect_ok +=1;
ui->textEditlog->append(QString::fromUtf8("Open onnxFile: %1 succesfully!").arg(onnxFile));
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
}
void MainWindow::on_startdetect_clicked()
{
timer->start();
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(true);
ui->openfile->setEnabled(false);
ui->loadfile->setEnabled(false);
ui->comboBox->setEnabled(false);
ui->textEditlog->append(QStringLiteral("=======================\n"
" 开始检测\n"
"=======================\n"));
}
void MainWindow::on_stopdetect_clicked()
{
ui->startdetect->setEnabled(true);
ui->stopdetect->setEnabled(false);
ui->openfile->setEnabled(true);
ui->loadfile->setEnabled(true);
ui->comboBox->setEnabled(true);
timer->stop();
ui->textEditlog->append(QStringLiteral("======================\n"
" 停止检测\n"
"======================\n"));
}
void MainWindow::on_comboBox_activated(const QString &arg1)
{
if (arg1.contains("s")){
conf = yolo_nets[0];
}else if (arg1.contains("m")) {
conf = yolo_nets[1];
}else if (arg1.contains("l")) {
conf = yolo_nets[2];
}else if (arg1.contains("x")) {
conf = yolo_nets[3];}
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral("使用模型类别:%1 args: %2 %3 %4")
.arg(arg1)
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
yolov5.h
#ifndef YOLOV5_H
#define YOLOV5_H
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <opencv2/core/cuda.hpp>
#include <fstream>
#include <sstream>
#include <iostream>
#include <exception>
#include <QMessageBox>
struct NetConfig
{
float confThreshold; // class Confidence threshold
float nmsThreshold; // Non-maximum suppression threshold
float objThreshold; //Object Confidence threshold
std::string netname;
};
class YOLOV5
{
public:
YOLOV5(){
} //构造函数
void Initialization(NetConfig conf);
bool loadModel(const char* onnxfile);
void detect(cv::Mat& frame);
private:
const float anchors[3][6] = {
{
10.0, 13.0, 16.0, 30.0, 33.0, 23.0}, {
30.0, 61.0, 62.0, 45.0, 59.0, 119.0},{
116.0, 90.0, 156.0, 198.0, 373.0, 326.0}};
const float stride[3] = {
8.0, 16.0, 32.0 };
std::string classes[80] = {
"person", "bicycle", "car", "motorbike", "aeroplane", "bus",
"train", "truck", "boat", "traffic light", "fire hydrant",
"stop sign", "parking meter", "bench", "bird", "cat", "dog",
"horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe",
"backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat",
"baseball glove", "skateboard", "surfboard", "tennis racket",
"bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl",
"banana", "apple", "sandwich", "orange", "broccoli", "carrot",
"hot dog", "pizza", "donut", "cake", "chair", "sofa", "pottedplant",
"bed", "diningtable", "toilet", "tvmonitor", "laptop", "mouse",
"remote", "keyboard", "cell phone", "microwave", "oven", "toaster",
"sink", "refrigerator", "book", "clock", "vase", "scissors",
"teddy bear", "hair drier", "toothbrush"};
const int inpWidth = 640;
const int inpHeight = 640;
float confThreshold;
float nmsThreshold;
float objThreshold;
//========= test =========
std::vector<int> blob_sizes{
1, 3, 640, 640};
cv::Mat blob = cv::Mat(blob_sizes, CV_32FC1, cv::Scalar(0.0));
//========== pro ========
//cv::Mat blob;
std::vector<cv::Mat> outs;
std::vector<int> classIds;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
std::vector<int> indices;
cv::dnn::Net net;
void drawPred(int classId, float conf, int left, int top, int right, int bottom, cv::Mat& frame);
void sigmoid(cv::Mat* out, int length);
};
static inline float sigmoid_x(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
#endif // YOLOV5_H
yolov5.cpp
#include "yolov5.h"
using namespace std;
using namespace cv;
void YOLOV5::Initialization(NetConfig conf)
{
this->confThreshold = conf.confThreshold;
this->nmsThreshold = conf.nmsThreshold;
this->objThreshold = conf.objThreshold;
classIds.reserve(20);
confidences.reserve(20);
boxes.reserve(20);
outs.reserve(3);
indices.reserve(20);
}
bool YOLOV5::loadModel(const char *onnxfile)
{
// try {
// this->net = cv::dnn::readNetFromONNX(onnxfile);
// int device_no = cv::cuda::getCudaEnabledDeviceCount();
// if (device_no==1){
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// }else{
// QMessageBox::information(NULL,"warning",QStringLiteral("正在使用CPU推理!\n"),QMessageBox::Yes,QMessageBox::Yes);
// }
// return true;
// } catch (exception& e) {
// QMessageBox::critical(NULL,"Error",QStringLiteral("模型加载出错,请检查重试!\n %1").arg(e.what()),QMessageBox::Yes,QMessageBox::Yes);
// return false;
// }
this->net = cv::dnn::readNetFromONNX(onnxfile);
this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_DEFAULT);
this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// if(1 == cv::cuda::getCudaEnabledDeviceCount()){
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// }
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_DEFAULT);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_INFERENCE_ENGINE);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
}
void YOLOV5::detect(cv::Mat &frame)
{
cv::dnn::blobFromImage(frame, blob, 1 / 255.0, Size(this->inpWidth, this->inpHeight), Scalar(0, 0, 0), true, false);
this->net.setInput(blob);
this->net.forward(outs, this->net.getUnconnectedOutLayersNames());
/generate proposals
classIds.clear();
confidences.clear();
boxes.clear();
float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth;
int n = 0, q = 0, i = 0, j = 0, nout = 8 + 5, c = 0;
for (n = 0; n < 3; n++) ///尺度
{
int num_grid_x = (int)(this->inpWidth / this->stride[n]);
int num_grid_y = (int)(this->inpHeight / this->stride[n]);
int area = num_grid_x * num_grid_y;
this->sigmoid(&outs[n], 3 * nout * area);
for (q = 0; q < 3; q++) ///anchor数
{
const float anchor_w = this->anchors[n][q * 2];
const float anchor_h = this->anchors[n][q * 2 + 1];
float* pdata = (float*)outs[n].data + q * nout * area;
for (i = 0; i < num_grid_y; i++)
{
for (j = 0; j < num_grid_x; j++)
{
float box_score = pdata[4 * area + i * num_grid_x + j];
if (box_score > this->objThreshold)
{
float max_class_socre = 0, class_socre = 0;
int max_class_id = 0;
for (c = 0; c < 80; c++) get max socre
{
class_socre = pdata[(c + 5) * area + i * num_grid_x + j];
if (class_socre > max_class_socre)
{
max_class_socre = class_socre;
max_class_id = c;
}
}
if (max_class_socre > this->confThreshold)
{
float cx = (pdata[i * num_grid_x + j] * 2.f - 0.5f + j) * this->stride[n]; ///cx
float cy = (pdata[area + i * num_grid_x + j] * 2.f - 0.5f + i) * this->stride[n]; ///cy
float w = powf(pdata[2 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_w; ///w
float h = powf(pdata[3 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_h; ///h
int left = (cx - 0.5*w)*ratiow;
int top = (cy - 0.5*h)*ratioh; ///坐标还原到原图上
classIds.push_back(max_class_id);
confidences.push_back(max_class_socre);
boxes.push_back(Rect(left, top, (int)(w*ratiow), (int)(h*ratioh)));
}
}
}
}
}
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
indices.clear();
cv::dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
this->drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame);
}
}
void YOLOV5::drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat &frame)
{
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255), 3);
string label = format("%.2f", conf);
label = this->classes[classId] + ":" + label;
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);
}
void YOLOV5::sigmoid(Mat *out, int length)
{
float* pdata = (float*)(out->data);
int i = 0;
for (i = 0; i < length; i++)
{
pdata[i] = 1.0 / (1 + expf(-pdata[i]));
}
}
边栏推荐
- From C to capable -- use the pointer as a function parameter to find out whether the string is a palindrome character
- Serious security vulnerabilities reported by moxa mxview network management software
- Opengauss database development and debugging tool guide
- Creation and destruction of function stack frame
- JS finds all the parent nodes or child nodes under a node according to the tree structure
- Concrete CMS vulnerability
- JMeter performance test JDBC request (query database to obtain database data) use "suggestions collection"
- How do you adjust the scope of activerecord Association in rails 3- How do you scope ActiveRecord associations in Rails 3?
- TCP 三次握手和四次挥手机制,TCP为什么要三次握手和四次挥手,TCP 连接建立失败处理机制
- Force deduction ----- the minimum path cost in the grid
猜你喜欢
![ASP. Net core 6 framework unveiling example demonstration [02]: application development based on routing, MVC and grpc](/img/cb/145937a27ef08050a370d5a255215a.jpg)
ASP. Net core 6 framework unveiling example demonstration [02]: application development based on routing, MVC and grpc
![45 lectures on MySQL [index]](/img/f6/70be00028908cbd9ed7f2c77687cee.png)
45 lectures on MySQL [index]
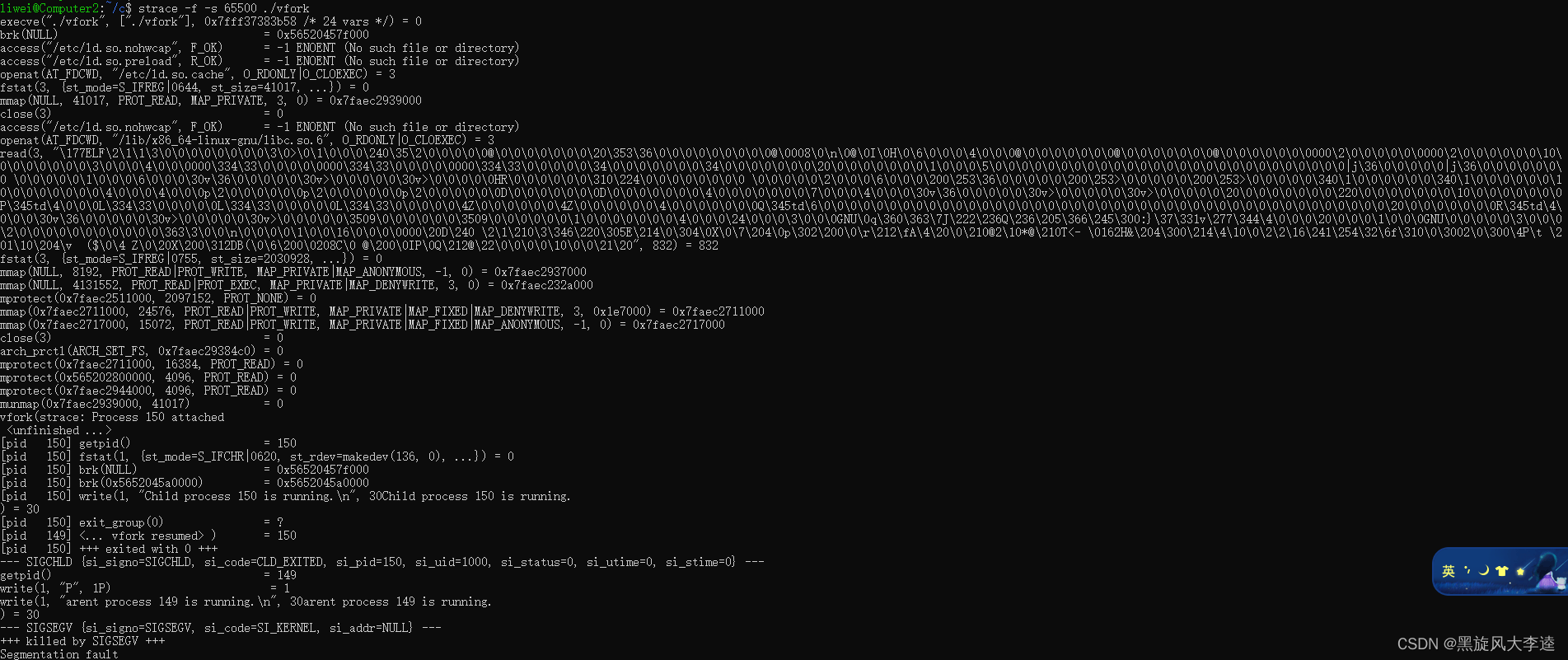
Segmentation fault occurs during VFORK execution
![[shutter] monitor the transparency gradient of the scrolling action control component (remove the blank of the top status bar | frame layout component | transparency component | monitor the scrolling](/img/c3/b9a614001f80345a5c1cb3c68ab27c.jpg)
[shutter] monitor the transparency gradient of the scrolling action control component (remove the blank of the top status bar | frame layout component | transparency component | monitor the scrolling
MySql实战45讲【索引】

Add automatic model generation function to hade
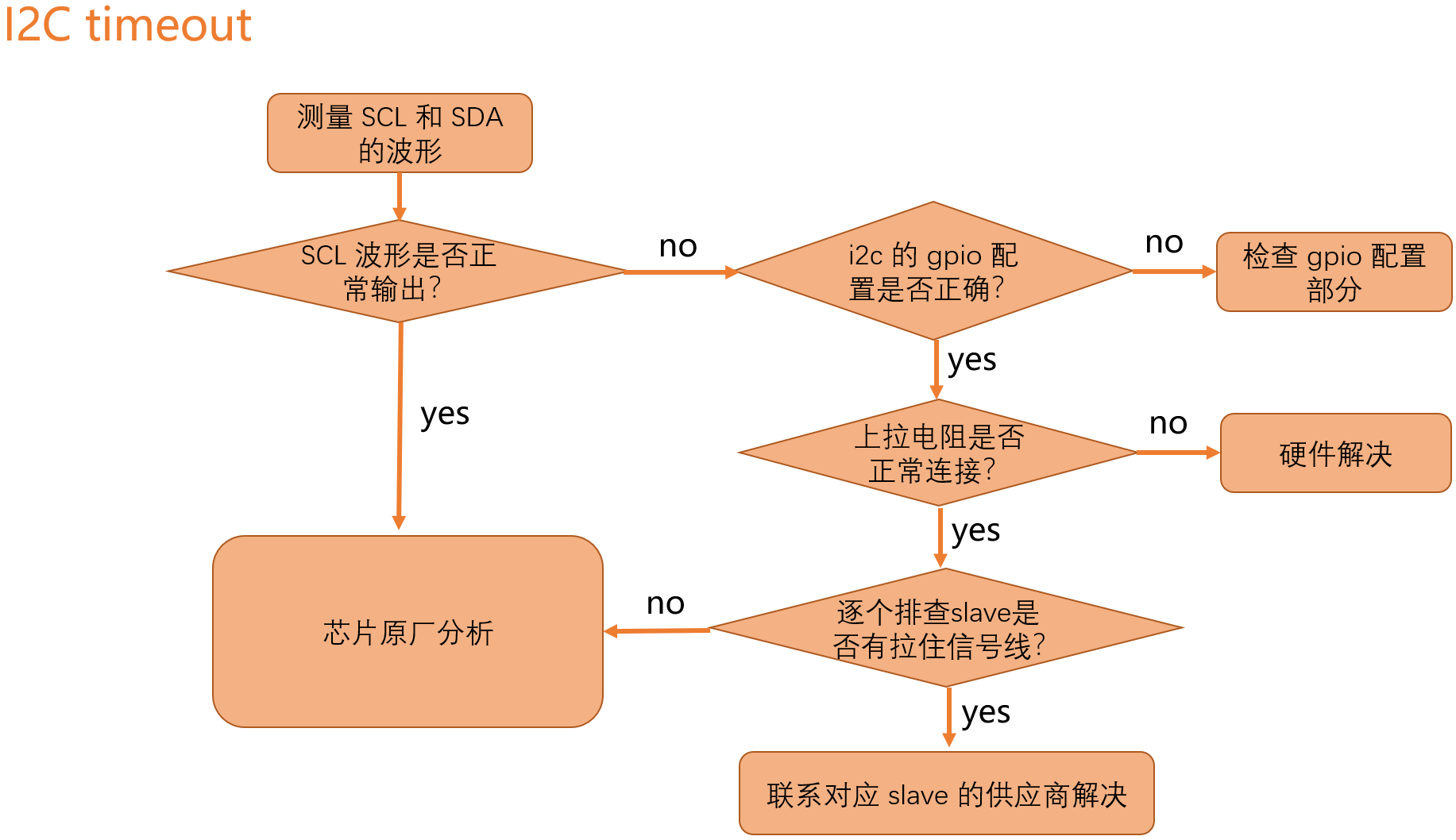
Sous - système I2C (IV): débogage I2C
![[principles of multithreading and high concurrency: 1_cpu multi-level cache model]](/img/7e/ad9ea78868126b149bd9f15f587e6c.jpg)
[principles of multithreading and high concurrency: 1_cpu multi-level cache model]
![MySQL Real combat 45 [SQL query and Update Execution Process]](/img/cd/3a635f0c3bb4ac3c8241cb77285cc8.png)
MySQL Real combat 45 [SQL query and Update Execution Process]

Spark on yarn资源优化思路笔记
随机推荐
函数栈帧的创建与销毁
SQL server queries the table structure of the specified table
How to implement append in tensor
[Fuhan 6630 encodes and stores videos, and uses RTSP server and timestamp synchronization to realize VLC viewing videos]
Sqlserver row to column pivot
敏捷认证(Professional Scrum Master)模拟练习题-2
Parameter index out of range (1 > number of parameters, which is 0)
MySql实战45讲【事务隔离】
Didi programmers are despised by relatives: an annual salary of 800000 is not as good as two teachers
MySql实战45讲【全局锁和表锁】
后管中编辑与预览获取表单的值写法
Docker install redis
TCP 三次握手和四次挥手机制,TCP为什么要三次握手和四次挥手,TCP 连接建立失败处理机制
Deep Reinforcement Learning for Intelligent Transportation Systems: A Survey 论文阅读笔记
docker安装redis
Force freeing memory in PHP
MySQL Real combat 45 [SQL query and Update Execution Process]
How to return ordered keys after counter counts the quantity
JMeter performance test JDBC request (query database to obtain database data) use "suggestions collection"
A2L file parsing based on CAN bus (2)