当前位置:网站首页>基于模糊预测与扩展卡尔曼滤波的野值剔除方法
基于模糊预测与扩展卡尔曼滤波的野值剔除方法
2022-07-31 12:50:00 【米朵儿技术屋】
摘要: 针对基于微机电系统无人机的野值的辨识和处理,设计了一种基于模糊预测与扩展卡尔曼滤波(EKF)的野值剔除方法.首先,将角速度模长引入梯度下降法中,通过动态调整梯度步长,提高模糊预测量的精度,有效避免模糊预测时对阈值依赖性较高及野值剔除后造成的数据点丢失;其次,以新息作为野值的判别准则,利用加速度计测量值信任度因子调整新息判别阈值,从而剔除观测传感器的野值;然后,通过共轭梯度法将模糊预测值转化为姿态四元素重新修正卡尔曼滤波的状态估计.最后,基于所搭建的共轴双桨无人机实验平台系统验证所提算法的有效性.实验结果表明:在共轴双桨无人机悬停、强机动情况下,所提算法能保证共轴双桨无人机的稳定飞行,有效提高共轴双桨无人机的姿态跟踪精度和稳定性.
边栏推荐
- Introduction to using NPM
- 线性表的基本概念
- STM32——软件SPI控制AD7705[通俗易懂]
- 基于verilog的CRC校验(汇总)
- golang八股文整理(持续搬运)
- [CPU Design Practice] Simple Pipeline CPU Design
- [core]-ARMV7-A、ARMV8-A、ARMV9-A 架构简介「建议收藏」
- 五种数据提交方式的优化
- ASM module in SAP Ecommerce Cloud Spartacus UI and Accelerator UI
- ASM module in SAP Ecommerce Cloud Spartacus UI and Accelerator UI
猜你喜欢
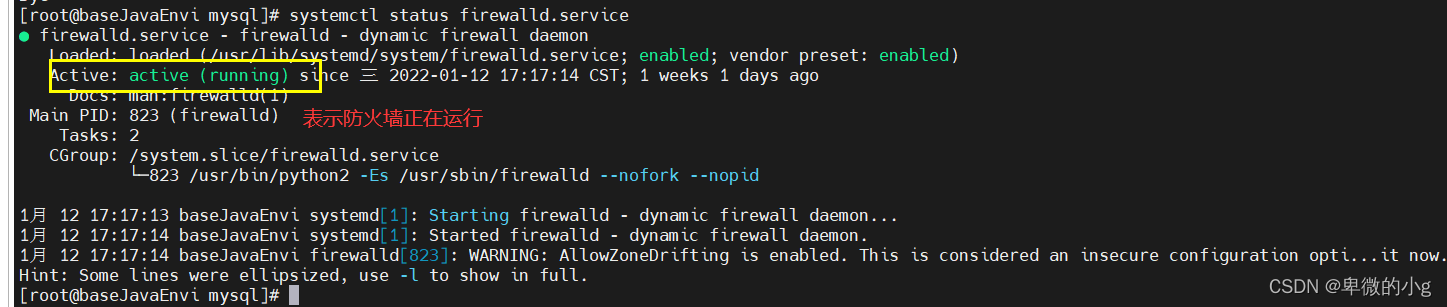
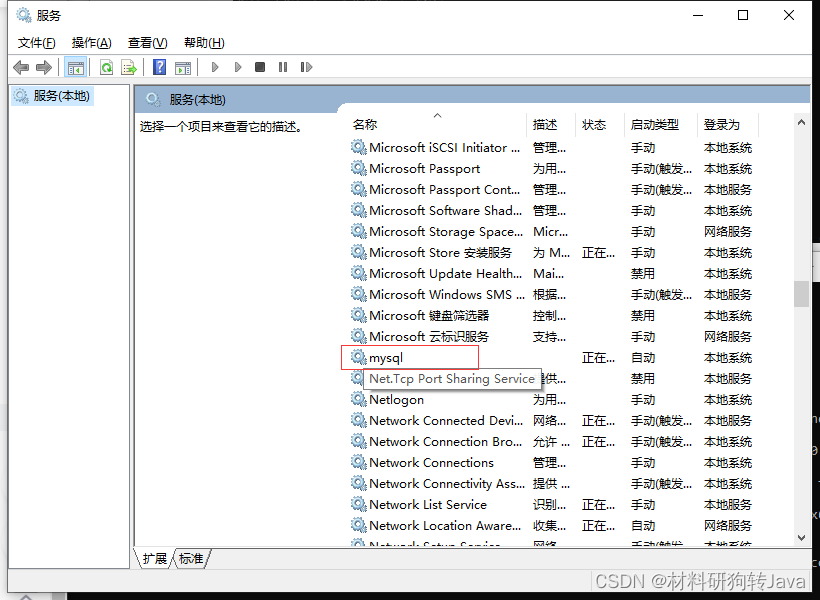
centos7安装mysql5.7

手撕Verilog PWM呼吸灯
ERROR 2003 (HY000) Can‘t connect to MySQL server on ‘localhost3306‘ (10061)解决办法

电脑重要文件很多,如何备份比较安全?

NameNode (NN) 和SecondaryNameNode (2NN)工作机制

通过斐波那契数再谈函数递归2.0
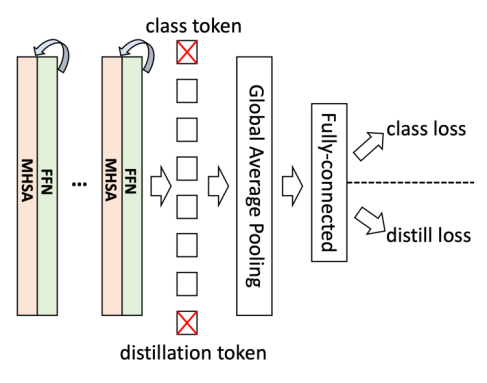
ECCV2022:在Transformer上进行递归,不增参数,计算量还少!
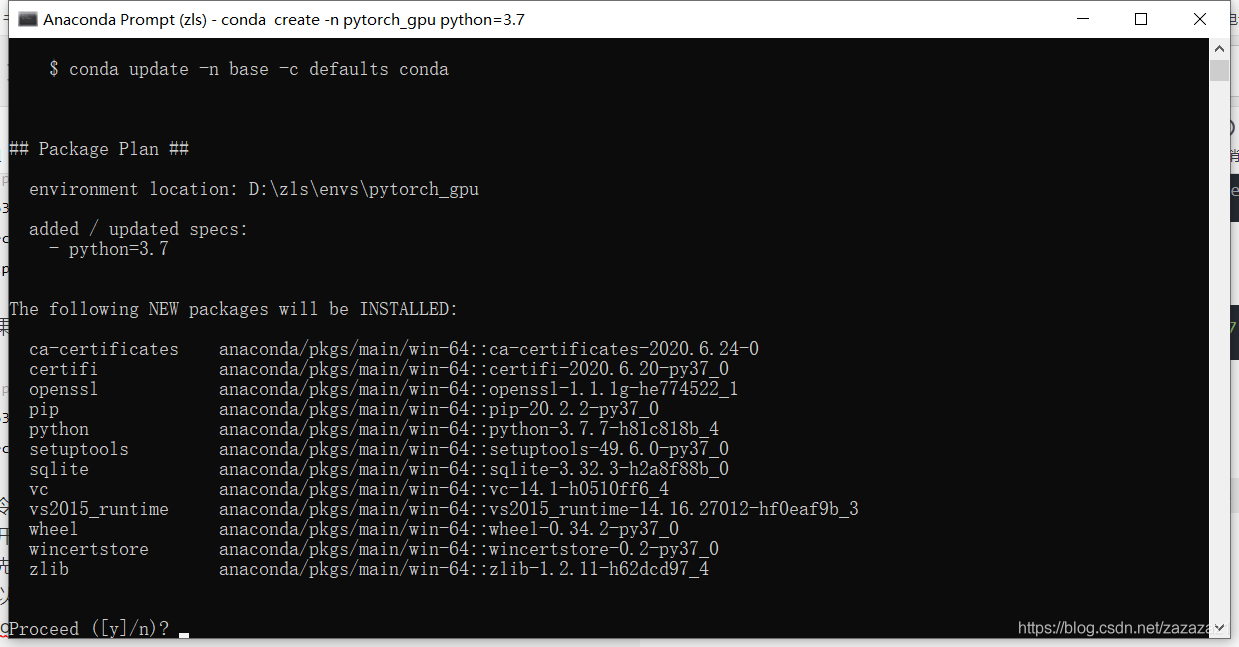
anaconda虚拟环境安装pytorch gpu版本

Centos7 install mysql5.7 steps (graphical version)
Centos7 install mysql5.7
随机推荐
Flutter keyboard visibility
架构实战营|模块8
使用openssl命令生成证书和对应的私钥,私钥签名,公钥验签
基于生物激励神经网络的室内实时激光SLAM控制方法
分布式锁有哪些,怎么实现(分布式锁的三种实现的对比)
纷享销客罗旭对话元气森林黄晓枫:零售数字化的终点不是创新,而是数据
使用docker搭建mysql主从
go中select语句
中望3D 2023正式发布,设计仿真制造一体化缩短产品开发周期
log4j2的使用
PAT考试总结(考试心得)
Quickly learn database management
alert(1) (haozi.me)靶场练习
榕树贷款GPU 硬件架构
跨境电商小知识之跨境电商物流定义以及方式讲解
Spark GC日志分析
[CPU Design Practice] Simple Pipeline CPU Design
列表页优化思路
PHP序列化:eval
Adding data nodes and decommissioning data nodes in the cluster