当前位置:网站首页>12. object detection mask RCNN
12. object detection mask RCNN
2022-06-28 23:59:00 【C--G】
Download resources
https://github.com/matterport/Mask_RCNN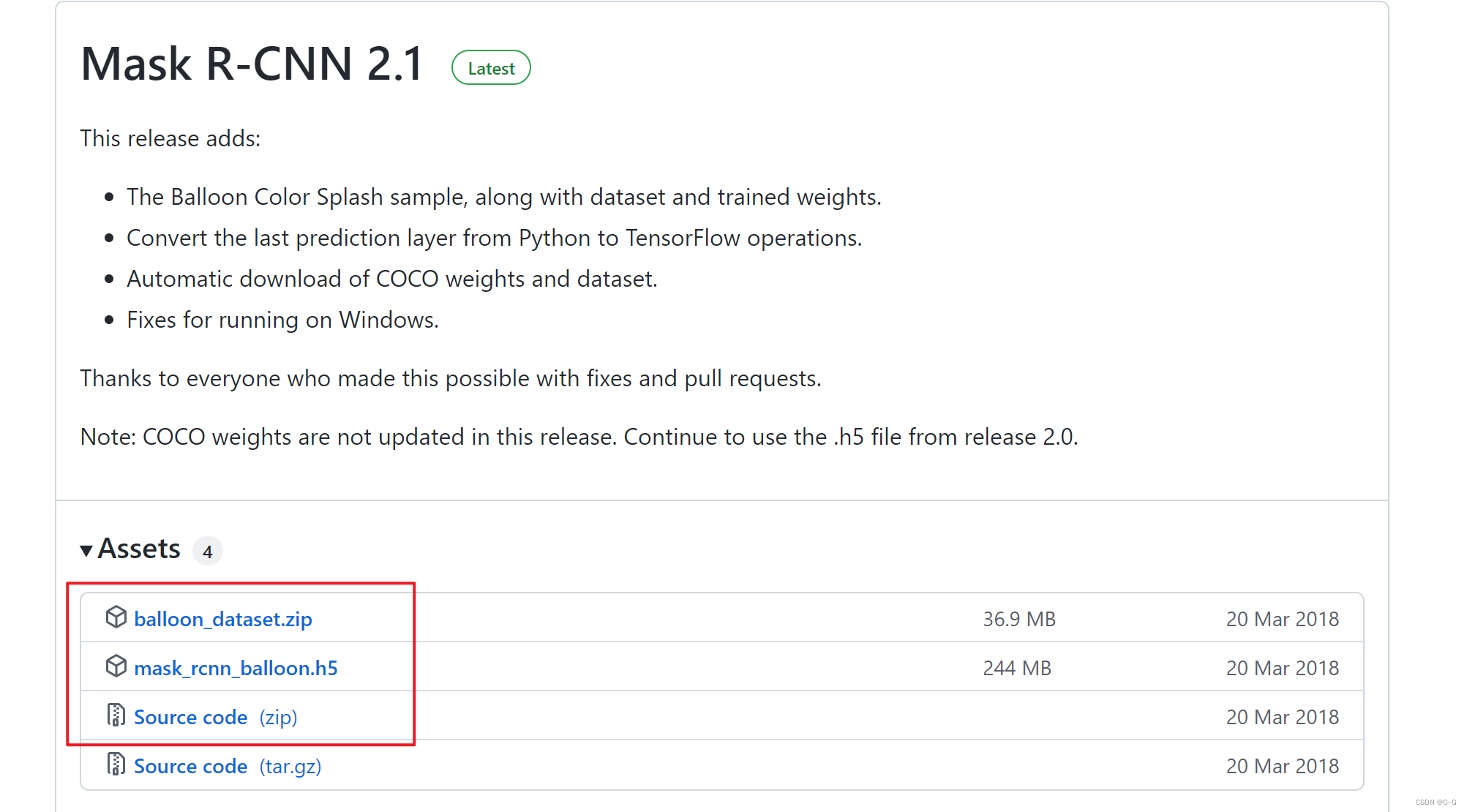


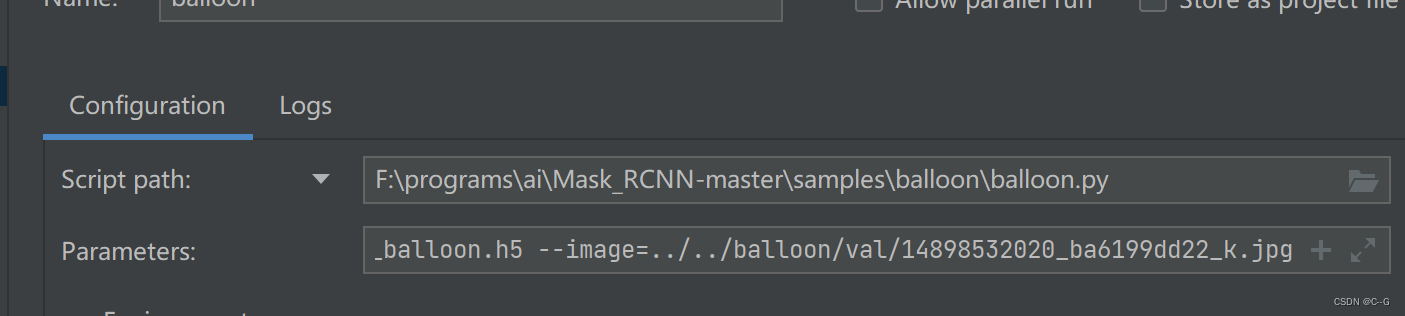
- balloon.py test


Theoretical explanation
The overall framework

FPN layer


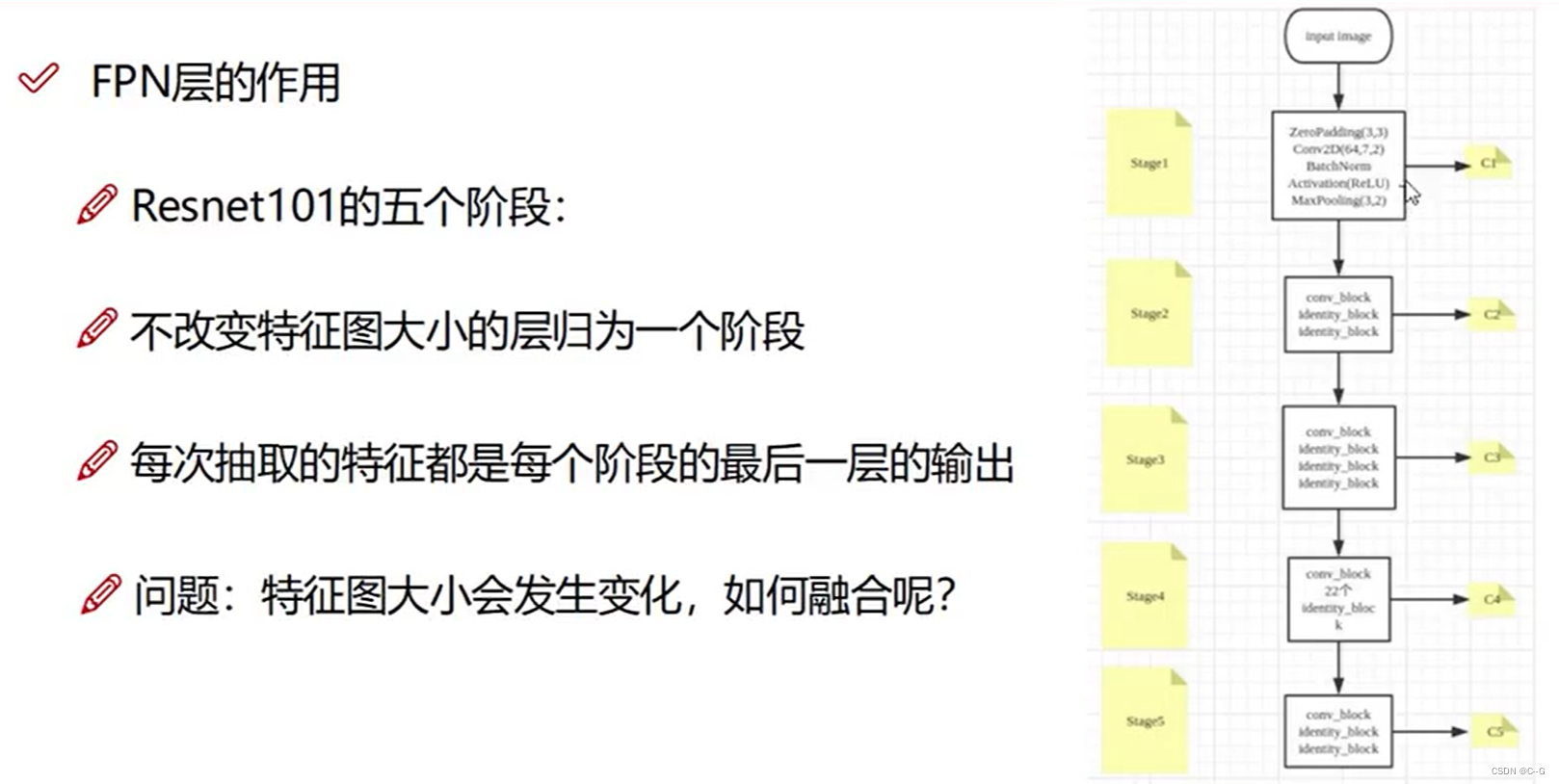

# Processing residual module
if callable(config.BACKBONE):
_, C2, C3, C4, C5 = config.BACKBONE(input_image, stage5=True,
train_bn=config.TRAIN_BN)
else:
_, C2, C3, C4, C5 = resnet_graph(input_image, config.BACKBONE,
stage5=True, train_bn=config.TRAIN_BN)
# On the sampling , Add up
# Top-down Layers
# TODO: add assert to varify feature map sizes match what's in config
P5 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c5p5')(C5)
P4 = KL.Add(name="fpn_p4add")([
KL.UpSampling2D(size=(2, 2), name="fpn_p5upsampled")(P5),
KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c4p4')(C4)])
P3 = KL.Add(name="fpn_p3add")([
KL.UpSampling2D(size=(2, 2), name="fpn_p4upsampled")(P4),
KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c3p3')(C3)])
P2 = KL.Add(name="fpn_p2add")([
KL.UpSampling2D(size=(2, 2), name="fpn_p3upsampled")(P3),
KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c2p2')(C2)])
# p2 To p5 use 3x3 Convolution ,p6 Maximum pooling
# Attach 3x3 conv to all P layers to get the final feature maps.
P2 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p2")(P2)
P3 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p3")(P3)
P4 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p4")(P4)
P5 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p5")(P5)
# P6 is used for the 5th anchor scale in RPN. Generated by
# subsampling from P5 with stride of 2.
P6 = KL.MaxPooling2D(pool_size=(1, 1), strides=2, name="fpn_p6")(P5)
# Note that P6 is used in RPN, but not in the classifier heads.
rpn_feature_maps = [P2, P3, P4, P5, P6]
mrcnn_feature_maps = [P2, P3, P4, P5]
generate_pyramid_anchors( Candidate box generation )

def generate_pyramid_anchors(scales, ratios, feature_shapes, feature_strides,
anchor_stride):
"""Generate anchors at different levels of a feature pyramid. Each scale is associated with a level of the pyramid, but each ratio is used in all levels of the pyramid. Returns: anchors: [N, (y1, x1, y2, x2)]. All generated anchors in one array. Sorted with the same order of the given scales. So, anchors of scale[0] come first, then anchors of scale[1], and so on. """
# Anchors
# [anchor_count, (y1, x1, y2, x2)]
anchors = []
for i in range(len(scales)):
anchors.append(generate_anchors(scales[i], ratios, feature_shapes[i],
feature_strides[i], anchor_stride))
return np.concatenate(anchors, axis=0)
def generate_anchors(scales, ratios, shape, feature_stride, anchor_stride):
""" scales: 1D array of anchor sizes in pixels. Example: [32, 64, 128] ratios: 1D array of anchor ratios of width/height. Example: [0.5, 1, 2] shape: [height, width] spatial shape of the feature map over which to generate anchors. feature_stride: Stride of the feature map relative to the image in pixels. anchor_stride: Stride of anchors on the feature map. For example, if the value is 2 then generate anchors for every other feature map pixel. """
# Get all combinations of scales and ratios
scales, ratios = np.meshgrid(np.array(scales), np.array(ratios))
scales = scales.flatten()
ratios = ratios.flatten()
# Enumerate heights and widths from scales and ratios
heights = scales / np.sqrt(ratios)
widths = scales * np.sqrt(ratios)
# Enumerate shifts in feature space
shifts_y = np.arange(0, shape[0], anchor_stride) * feature_stride
shifts_x = np.arange(0, shape[1], anchor_stride) * feature_stride
shifts_x, shifts_y = np.meshgrid(shifts_x, shifts_y)
# Enumerate combinations of shifts, widths, and heights
box_widths, box_centers_x = np.meshgrid(widths, shifts_x)
box_heights, box_centers_y = np.meshgrid(heights, shifts_y)
# Reshape to get a list of (y, x) and a list of (h, w)
box_centers = np.stack(
[box_centers_y, box_centers_x], axis=2).reshape([-1, 2])
box_sizes = np.stack([box_heights, box_widths], axis=2).reshape([-1, 2])
# Convert to corner coordinates (y1, x1, y2, x2)
boxes = np.concatenate([box_centers - 0.5 * box_sizes,
box_centers + 0.5 * box_sizes], axis=1)
return boxes
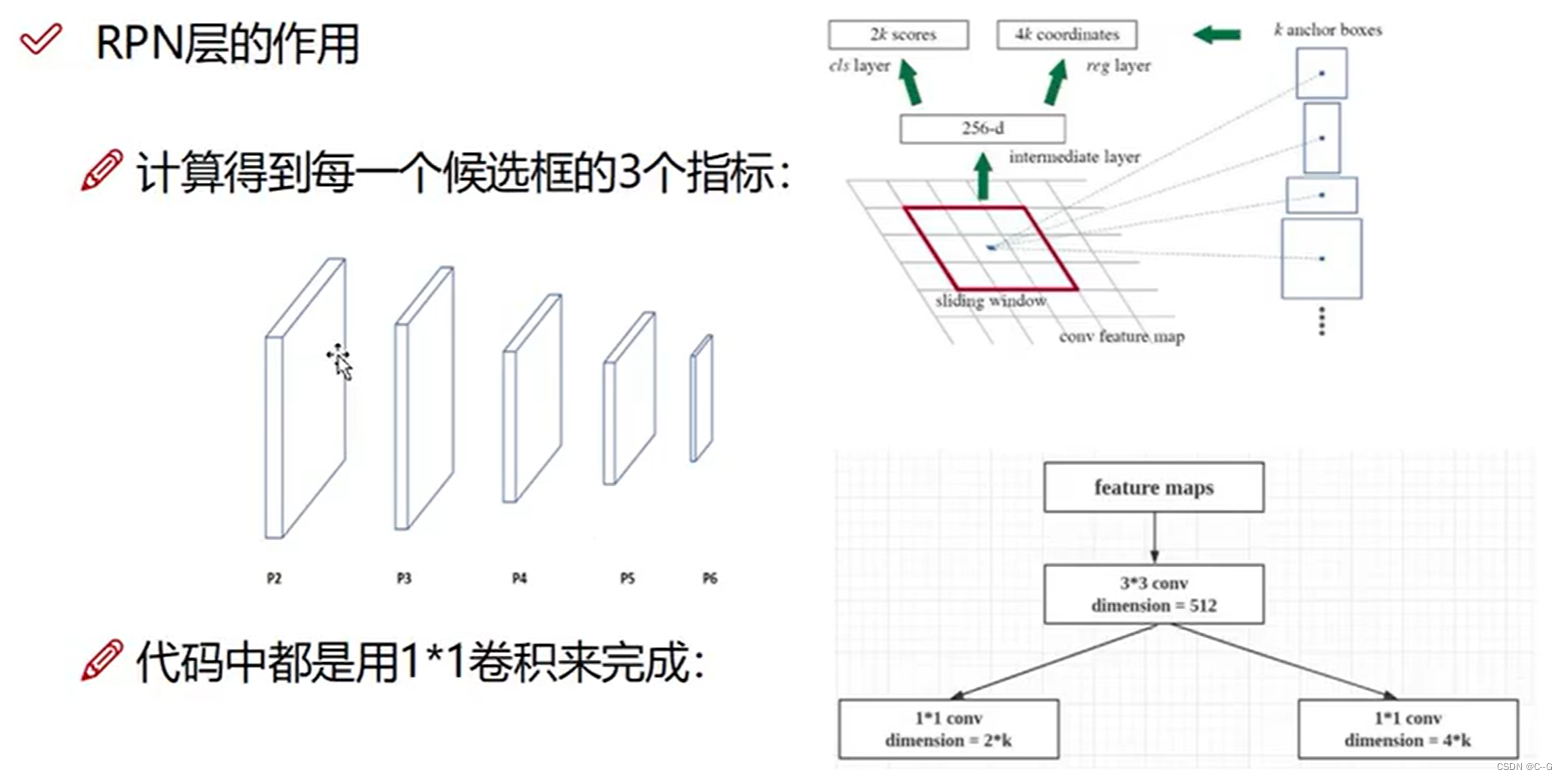
RPN layer
def build_rpn_model(anchor_stride, anchors_per_location, depth):
"""Builds a Keras model of the Region Proposal Network. It wraps the RPN graph so it can be used multiple times with shared weights. anchors_per_location: number of anchors per pixel in the feature map anchor_stride: Controls the density of anchors. Typically 1 (anchors for every pixel in the feature map), or 2 (every other pixel). depth: Depth of the backbone feature map. Returns a Keras Model object. The model outputs, when called, are: rpn_class_logits: [batch, H * W * anchors_per_location, 2] Anchor classifier logits (before softmax) rpn_probs: [batch, H * W * anchors_per_location, 2] Anchor classifier probabilities. rpn_bbox: [batch, H * W * anchors_per_location, (dy, dx, log(dh), log(dw))] Deltas to be applied to anchors. """
input_feature_map = KL.Input(shape=[None, None, depth],
name="input_rpn_feature_map")
outputs = rpn_graph(input_feature_map, anchors_per_location, anchor_stride)
return KM.Model([input_feature_map], outputs, name="rpn_model")
def rpn_graph(feature_map, anchors_per_location, anchor_stride):
"""Builds the computation graph of Region Proposal Network. feature_map: backbone features [batch, height, width, depth] anchors_per_location: number of anchors per pixel in the feature map anchor_stride: Controls the density of anchors. Typically 1 (anchors for every pixel in the feature map), or 2 (every other pixel). Returns: rpn_class_logits: [batch, H * W * anchors_per_location, 2] Anchor classifier logits (before softmax) rpn_probs: [batch, H * W * anchors_per_location, 2] Anchor classifier probabilities. rpn_bbox: [batch, H * W * anchors_per_location, (dy, dx, log(dh), log(dw))] Deltas to be applied to anchors. """
# TODO: check if stride of 2 causes alignment issues if the feature map
# is not even.
# Shared convolutional base of the RPN Shared convolution
shared = KL.Conv2D(512, (3, 3), padding='same', activation='relu',
strides=anchor_stride,
name='rpn_conv_shared')(feature_map)
# Anchor Score. [batch, height, width, anchors per location * 2].
x = KL.Conv2D(2 * anchors_per_location, (1, 1), padding='valid',
activation='linear', name='rpn_class_raw')(shared)
# Reshape to [batch, anchors, 2]
rpn_class_logits = KL.Lambda(
lambda t: tf.reshape(t, [tf.shape(t)[0], -1, 2]))(x)
# Softmax on last dimension of BG/FG.
rpn_probs = KL.Activation(
"softmax", name="rpn_class_xxx")(rpn_class_logits)
# Bounding box refinement. [batch, H, W, anchors per location * depth]
# where depth is [x, y, log(w), log(h)]
x = KL.Conv2D(anchors_per_location * 4, (1, 1), padding="valid",
activation='linear', name='rpn_bbox_pred')(shared)
# Reshape to [batch, anchors, 4]
rpn_bbox = KL.Lambda(lambda t: tf.reshape(t, [tf.shape(t)[0], -1, 4]))(x)
return [rpn_class_logits, rpn_probs, rpn_bbox]
ProposalLayer layer

DetectionTargetLayer layer


class DetectionTargetLayer(KE.Layer):
"""Subsamples proposals and generates target box refinement, class_ids, and masks for each. Inputs: proposals: [batch, N, (y1, x1, y2, x2)] in normalized coordinates. Might be zero padded if there are not enough proposals. gt_class_ids: [batch, MAX_GT_INSTANCES] Integer class IDs. gt_boxes: [batch, MAX_GT_INSTANCES, (y1, x1, y2, x2)] in normalized coordinates. gt_masks: [batch, height, width, MAX_GT_INSTANCES] of boolean type Returns: Target ROIs and corresponding class IDs, bounding box shifts, and masks. rois: [batch, TRAIN_ROIS_PER_IMAGE, (y1, x1, y2, x2)] in normalized coordinates target_class_ids: [batch, TRAIN_ROIS_PER_IMAGE]. Integer class IDs. target_deltas: [batch, TRAIN_ROIS_PER_IMAGE, (dy, dx, log(dh), log(dw)] target_mask: [batch, TRAIN_ROIS_PER_IMAGE, height, width] Masks cropped to bbox boundaries and resized to neural network output size. Note: Returned arrays might be zero padded if not enough target ROIs. """
def __init__(self, config, **kwargs):
super(DetectionTargetLayer, self).__init__(**kwargs)
self.config = config
def call(self, inputs):
proposals = inputs[0]
gt_class_ids = inputs[1]
gt_boxes = inputs[2]
gt_masks = inputs[3]
# Slice the batch and run a graph for each slice
# TODO: Rename target_bbox to target_deltas for clarity
names = ["rois", "target_class_ids", "target_bbox", "target_mask"]
outputs = utils.batch_slice(
[proposals, gt_class_ids, gt_boxes, gt_masks],
lambda w, x, y, z: detection_targets_graph(
w, x, y, z, self.config),
self.config.IMAGES_PER_GPU, names=names)
return outputs
def compute_output_shape(self, input_shape):
return [
(None, self.config.TRAIN_ROIS_PER_IMAGE, 4), # rois
(None, self.config.TRAIN_ROIS_PER_IMAGE), # class_ids
(None, self.config.TRAIN_ROIS_PER_IMAGE, 4), # deltas
(None, self.config.TRAIN_ROIS_PER_IMAGE, self.config.MASK_SHAPE[0],
self.config.MASK_SHAPE[1]) # masks
]
def compute_mask(self, inputs, mask=None):
return [None, None, None, None]
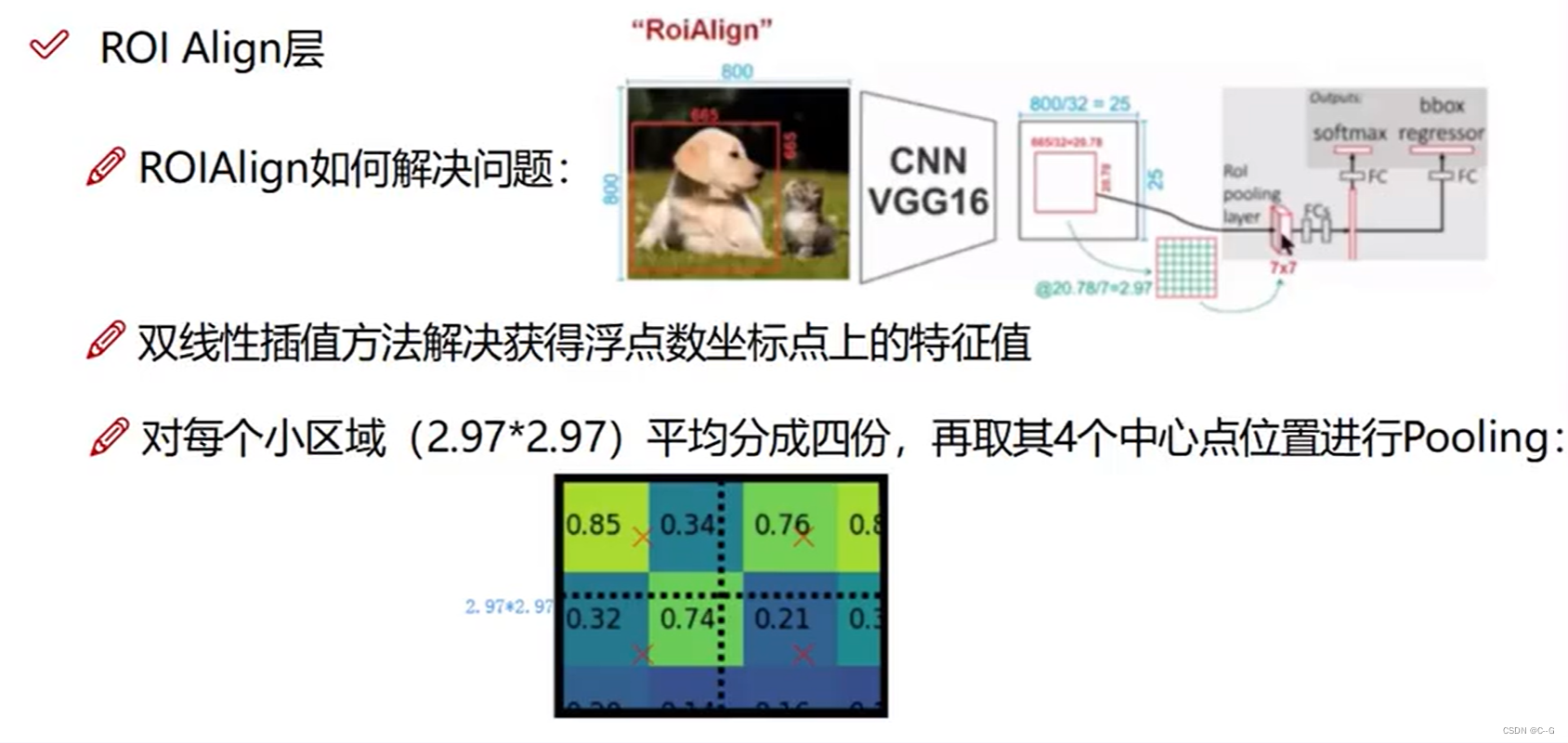
ROI Align layer

边栏推荐
- MapReduce案例
- Learning fuzzy from SQL injection to bypass the latest safe dog WAF
- 解决ConfigParser解析中文问题
- mysql 8.0以上报2058 解决方式
- Is it safe to open a stock account on the Internet?
- [software analysis] iterative explanation of software analysis, design and modeling
- ctfshow XSS
- 随笔记:插入排序 --from wcc
- urllib.parse 解析url连接中的参数
- Stm32f407------- general timer
猜你喜欢








随机推荐
Give you a project, how will you carry out performance testing (I)
Mysql的四种引擎介绍
Easy to use free ppt template
随笔记:插入排序 --from wcc
Test experience: how testers evolve from 0 to 1
What pitfalls should be avoided in the job interview for the operation post in 2022?
stm32F407-------GPIO输入实验
ctfshow XSS
转载:VTK笔记-裁剪分割-三维曲线或几何切割体数据(黑山老妖)
Yyds dry goods inventory building knowledge map from scratch with neo4j (I)
stm32F407-------IO引脚复用映射
stm32F407-------跑马灯、蜂鸣器
一条update语句到底加了多少锁?带你深入理解底层原理
What will be done after digital IC Verification?
【C Primer Plus第二章課後編程題】
Is it safe and reliable to open a securities account in Yixue school?
MapReduce case
mysql 8.0以上报2058 解决方式
PHP函数file_get_contents与操作系统的内存映射
Have you ever met a fake interview in a job interview? How to avoid?