当前位置:网站首页>“如何写好一篇学术论文?”这大概是最详实的一则攻略了!
“如何写好一篇学术论文?”这大概是最详实的一则攻略了!
2022-08-02 15:29:00 【风度78】
论文通俗来说是本科和硕士的升学助力,也是学术界的硬通货,更是未来工作的加分项和敲门砖。
论文的写作对很多学生来说,是一种挑战。有些学生不知该如何对论文做选题,更多的学生则是对毕业论文写作到底有什么要求不清楚,不知从何下手,常常为毕业论文发愁。
我跟几位CVPR、ECCV等顶会审稿人聊了聊,总结输出如下文,希望对大家有启发。
扫码0.1元领取
《顶会审稿人论文写作干货》

论文写作的分为四个顺序:阅读论文→确定创新点→Coding/实验→论文写作。
01
阅读论文
发表论文的前提是大量阅读论文!!!文献阅读分为三个阶段,初期找方向,中期重点突破,后期广泛涉猎。
初期读论文需要逐字精读,方向不必严格限定,感兴趣论文涉及的论文链都可以去读。一篇论文用时一天,英文论文+中文分享,前期阅读论文数量30篇以上,可以提高学术英语阅读能力和专业术语积累。
中期读论文要重点精读,严格限定研究方向和方向涉及的论文链。重点论文时间控制在半天,泛泛论文是一小时,重点论文重复读+源码学习,论文阅读数最好为10篇以上。了解学习技术演进、学习方法创新和整理创新方法链。
后期少数精读+大量泛读,不限定方向,自己重点方向+涉猎方向。
重点论文两小时,泛泛论文半小时,跟随研究方向的最新发展,了解其他方向的大致进展,思考创新点引进嫁接。
《顶会审稿人论文写作干货》
0.1元领取
02
确定创新点
可以从以下四个方面确定自己论文的创新点:
1. 数据集的改动:噪声、几何变换、遮挡、光照条件、场景依赖
2. 模型的问题:模型体积、推理速度、收敛困难、非端到端、后处理优化
3. 结构替换:transformer、FCN、AE、
4. 特定场景的应用:通用模型考虑泛化能力—特定应用考虑专用性。比如夜间检测、水下检测、鱼眼相机检测。
《顶会审稿人论文写作干货》
0.1元领取
另外就是要记住A+B+C/2.5法则
A:本研究方向的继承性创新点(自然演进)
B:其他方向的既有方法(嫁接到其他任务)
C:细节上的创新(数据增强/数据集/损失函数设计)
例如下面这篇CVPR2021: CutPaste,运用的就是A+B+C/2.5法则。
A:自然演进 cutout—cutpaste+B:既有方法 将自监督学习的pretask应用于异常检测+C:细节创新 高斯概率密度估计(GDE)判断异常
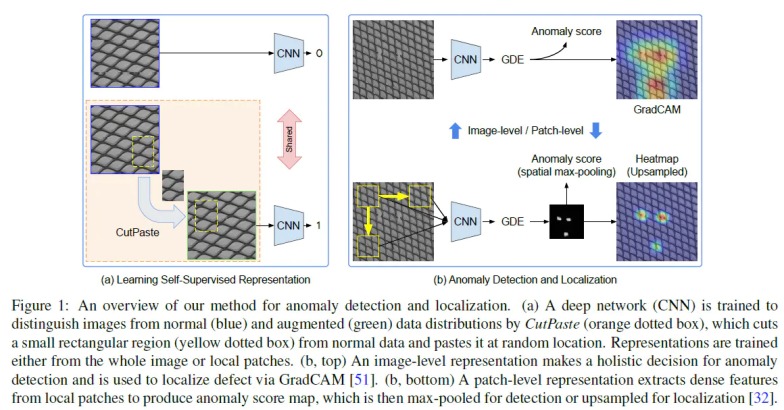
(CVPR2021: CutPaste)
《论文写作指导资料》
0.1元领取
03
Coding/实验
原则:1篇论文代码复现(至少读懂代码实现)>>跑通多个项目demo
1. 找到baseline论文的代码;
2. 在baseline代码上实现期望功能的最小化实现;
3. 逐步实现最终的功能代码,同时做实现验证各部分设计的效果。
04
论文写作
01:写作策略:
选择2篇左右的范文,去分析论文结构(Introduction)、重点词句(Related Work)、语言风格(Method)、实验设计(Experiment)、绘图风格(Conclusion)和故事设计(References)。
02:论文写作技巧
(1)论文写作技巧——注意标题
用⼀句话概括你所做的工作
考虑搜索引擎的影响,包含关键词
可以新颖一些
(2)论文写作技巧——首页加图
(3)论文写作技巧—Introduction直接列贡献
不用介绍各个部分如何组织的;
直接说做出了哪些贡献;
标明贡献位置。
这边也给大家准备了《顶会审稿人论文写作干货》,全部看完的话,写篇优秀论文不在话下。
扫码0.1元领取
《顶会审稿人论文写作干货》
边栏推荐
猜你喜欢
第十五天笔记

做好私域流量!全民拼购就可以了。
类的比较大小(Comparable -> compareTo(类自己实现接口),Comparator -> compare(新建一个类作为比较器))
05-读写锁、阻塞队列及四组API、同步队列

UnicodeEncodeError: 'gbk' codec can't encode character '\u2022' in position 178: illegal multibyte s
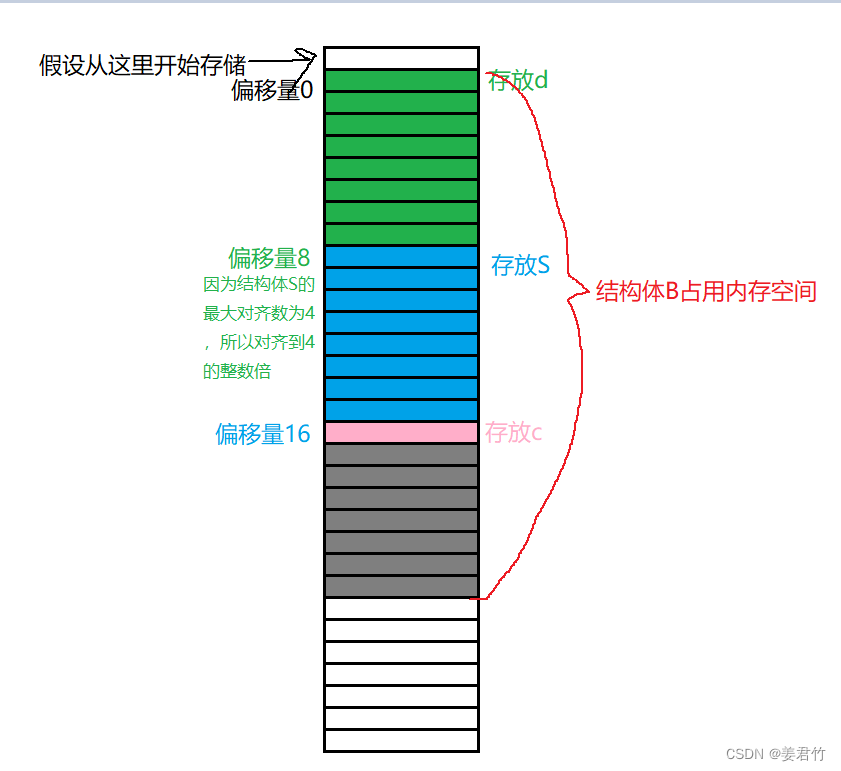
【学习笔记之菜Dog学C】自定义类型详解(结构体+枚举+联合)
机械臂速成小指南(十四):多项式插值轨迹规划
Break the stereotype, DIY is your own unique mall
vim的高级用法配置
绝对最直白的MySQL MVCC机制总结,免费拿走
随机推荐
Go-5-简单介绍fmt库
AI+BI+可视化,Sugar BI架构深度剖析
Qt读取Json文件(含源码+注释)
20 Lectures on Disassembly of Multi-merchant Mall System Functions-Platform Distribution Overview
.NET性能优化-使用SourceGenerator-Logger记录日志
ROS人机交互软件
SIGIR'22 推荐系统论文之序列推荐(短文)篇
CWE4.8:2022年危害最大的25种软件安全问题
ACL/NAACL'22 推荐系统论文梳理
Advanced usage of vim configuration
【Codeforces Round #811 (Div. 3)】【题目解析+AK代码】
VPP snort插件
轻松入门自然语言处理系列 专题8 源码解读──基于HMM的结巴分词
【学习笔记之菜Dog学C】自定义类型详解(结构体+枚举+联合)
24、wpf之布局(二)
UnicodeEncodeError: 'gbk' codec can't encode character '\u2022' in position 178: illegal multibyte s
SIGIR'22 推荐系统论文之序列推荐(长文)篇
威纶通触摸屏如何隐藏系统设置箭头图标及通过参数进入系统设置?
Qt | 模态对话框和非模态对话框 QDialog
Qt | Qt 的项目文件.pro 文件详解