当前位置:网站首页>[fh-gfsk] fh-gfsk signal analysis and blind demodulation research
[fh-gfsk] fh-gfsk signal analysis and blind demodulation research
2022-07-03 01:18:00 【FPGA and MATLAB】
1. Software version
matlab2021a
2. System principle
In wireless communication , In order to combat channel fading and ensure the safety of transmission information, frequency hopping is often used (Frequency Hopping, FH) Communications technology . Gaussian frequency shift keying (Gauss Frequency Shift Keying, GFSK) With constant amplitude envelope 、 Power spectrum concentration 、 Narrow spectrum and other desirable characteristics of wireless communication systems .FH-GFSK It combines the advantages of the above two technologies , therefore , It is widely used in digital communication . This topic is based on GNU Radio First of all, the software radio receiver of FH-GFSK Signal acquisition , Then analyze the collected signals , Finally, the blind demodulation of the signal is realized . Through the research of this subject , It aims to deepen students' understanding of frequency hopping communication 、 Understanding of Gaussian frequency shift keying technology , Master the analysis and processing methods of communication signals
1. complete 5.8GHz Frequency band FH-GFSK Signal acquisition 、 Analysis and blind demodulation .
2. The adoption is based on GNU Radio Software radio receiver for RF FH-GFSK To collect .
3. use Matlab Analyze the speed hopping and frequency hopping patterns of the collected signals , Get its frequency hopping pattern .
4. use Matlab Yes GFSK Gaussian filtering parameters of the signal 、 The modulation index and other parameters are estimated , Used to complete FH-GFSK Blind demodulation of signal .
According to the references ,GMSK The demodulation structure is as follows :

May refer to :https://wenku.baidu.com/view/1631562eb307e87101f69679.html
So when making blind estimation , Need to know fc, And parameters of low-pass filter , Behind it is the fixed structure , There is no need to estimate .
Then in the title :

Gaussian filter parameters , In fact, it is to obtain the corresponding low-pass filter ;
Then the formula of modulation index is :
therefore , Estimate modulation index , It's actually getting fd and Rb, and Rb Indicates the symbol rate , As long as the signal is received , You can get it , Don't estimate , So it is estimated fd.FSK Modulation is a modulation method in which the frequency of the carrier is proportional to the information symbol , When sending a message symbol 1 The transmission frequency moves upward fdHz, When sending a message symbol -1 The transmission frequency moves down fdHz. Then here is FM communication , So estimate fd. therefore , here , Parameter estimation of busy demodulation , The essence is frequency estimation and filter parameter estimation .
3. Part of the source code
fs = 100e6;
Nfft = 4096;
frameNumber = floor(length(x)/Nfft);
txBlockFFT = zeros(frameNumber,Nfft);
for i = 0:frameNumber-1
i
start = i*Nfft;
txBlockFFT(i+1,:) = fftshift(fft(x(start+1:start+Nfft)));
[maxValue maxIndex(i+1)] = max(abs(txBlockFFT(i+1,:)));
end
fc = 5.8e9;
delta_f = fs/Nfft;
f = delta_f: delta_f: fs;
f = f - fs/2;
%detect vaalid signal
validIndexCount = 1;
validIndex = zeros(1,1);
validIndex(validIndexCount) = 0;
validFrameCount = 0;
axes(handles.axes1);
for i = 1:frameNumber-1
i
if(max(abs(txBlockFFT(i+1,:))> 280))
validFrameCount = validFrameCount + 1;
validFrame(validFrameCount) = i+1;
if(abs(maxIndex(i+1) - validIndex(validIndexCount)) > 40)
validIndexCount = validIndexCount +1;
validIndex(validIndexCount) = maxIndex(i+1) ;
detectFHFc = validIndex(2:end)*fs/Nfft- fs/2;
end
detectFHResult(i+1) = maxIndex(i+1)*fs/Nfft- fs/2+fc;
t = (0:length(detectFHResult)-1)*Nfft/fs;
plot(t,detectFHResult,'c*');
hold on
end
axis([0,0.1983,5.74e9,5.86e9]);
pause(0.001);
end
hold on;
y_label = fc*ones(1,length(detectFHResult));
plot(t,y_label,'r');
ylim([fc-50e6 fc+50e6]);
xlabel(' Time s')
ylabel(' frequency Hz');
grid on;
ind1 = find(abs(detectFHResult)>0) ;
ind2 = find(detectFHResult==0) ;
detectFHResult(ind2)=[];
flag = [];
for i = 1:length(ind1)-1
if ind1(i+1)-ind1(i) > 20
flag = [flag,i];
end
end
% Lock the frequency point
for i = 1:length(flag)
if i == 1
detectFHResult2(i) = mean(detectFHResult(1:flag(i)));
else
detectFHResult2(i) = mean(detectFHResult(flag(i-1)+1:flag(i)));
end
end
% Frequency hopping period
for i = 1:length(flag)
if i == 1
ind12(i) = ind1(flag(i)+1)-ind1(1);
else
ind12(i) = ind1(flag(i)+1)-ind1(flag(i-1)+1);
end
end
cycle = floor(mean(ind12));
parameters;
t = (0:Nfft-1)/fs;
t = t';
for i=0:frameNumber-1
start = i*Nfft;
txBlockFFT(i+1,:) = fftshift(fft(x(start+1:start+Nfft)));
end
Avgs = 1000*mean2(abs(txBlockFFT));
% Modulation index
% Gaussian filter parameter estimation
indx = 0;
for i=0:frameNumber-100% Real time parameter estimation by frame
i
[maxValue,maxIndex(i+1)]= max(abs(txBlockFFT(i+1,:)));
if max(abs(txBlockFFT(i+1,:)))> Avgs
indx = indx + 1;
if(abs(maxIndex(i+1) - validIndex(validIndexCount)) > 40)
validIndexCount = validIndexCount +1;
validIndex(validIndexCount) = maxIndex(i+1) ;
detectFHFc = validIndex(2:end)*fs/Nfft- fs/2;
end
detectFHResult(i+1) = maxIndex(i+1)*fs/Nfft- fs/2+fc;
selectFrameData = txBlockFFT(i+1,:);
[maxValue,maxIndex] = max(abs(selectFrameData));
selectFHFc = maxIndex*fs/Nfft- fs/2;
startIndex = (i+1)*Nfft;
selectRxFrame(i+1,:) = x(startIndex+1:startIndex+Nfft).*(cos(2*pi*selectFHFc*t)-sqrt(-1)*sin(2*pi*selectFHFc*t));
% Remove the directly combined signal after interruption
selectRxFrame2(indx,:)= x(startIndex+1:startIndex+Nfft).*(cos(2*pi*selectFHFc*t)-sqrt(-1)*sin(2*pi*selectFHFc*t));
else
startIndex = (i+1)*Nfft;
selectRxFrame(i+1,:)= x(startIndex+1:startIndex+Nfft);% No signal area
end
end
axes(handles.axes2);
[R,C] = size(selectRxFrame2);
Rx = reshape(selectRxFrame2',[1,R*C]);
plot(real(Rx),'b');
xlabel(' Time s')
grid on;
axis([2000,20000,-1,1]);
% The data is restored to the original one-dimensional signal
[R,C] = size(selectRxFrame2);
Rx = reshape(selectRxFrame2',[1,R*C]);
% Filter estimate
% Computational bandwidth , By calculation -3db Spectrum range as bandwidth
[x0,t,ssf,yy] = plotspec(Rx,1/fs);
Y2 = 10*log10(yy/max(yy));
Y3 = Y2(length(Y2)/2:end);
indx = find(Y3>=-3);
ssf2 = ssf(length(ssf)/2:end);
BB = (ssf2(indx(end))-ssf2(indx(1)));
BT = 100*BB/fs;
disp(' Modulation index ');
set(handles.edit2,'string',num2str(BT));
Rfinal = [];
for i = 1:R
i
RR = selectRxFrame2(i,:);
[Isignal_,h] = glpfsignal(real(RR),fs,BT);
[Qsignal_,h] = glpfsignal(imag(RR),fs,BT);
% Filtering is time-consuming , I only intercept a part here for processing
Isignal = Isignal_(1:length(RR));
Qsignal = Qsignal_(1:length(RR));
% Output binary data
tmps = Isignal.*[diff(Qsignal,1),0] - Qsignal.*[diff(Isignal,1),0];
% Do filtering
tmps = tmps-mean(tmps);
w = hamming(128);
tmps = conv(tmps,w);
tmps = tmps-mean(tmps);
Rfinal = [Rfinal,tmps];
end
tmps2= Rfinal>=0;
axes(handles.axes3);
plot(Rfinal)
axis([2000,20000,-2,3]);
axes(handles.axes4);
plot(tmps2)
axis([2000,20000,-1,2]);
disp(' Skip period ');
cycle
disp(' Frequency point ');
detectFHResult2
fid = fopen('a.txt','wt');
for i = 1:16
fprintf(fid,'%6.2f\n',detectFHResult2(i));
end
fclose(fid);
4. Simulation conclusion
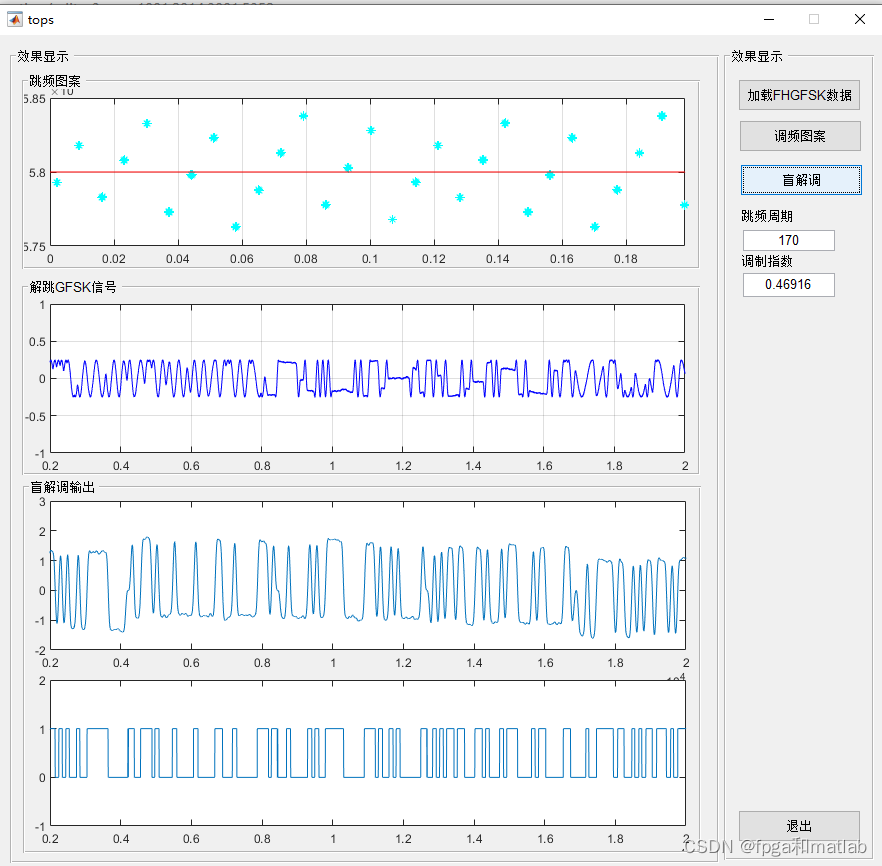
A01-152
边栏推荐
- 看疫情之下服装企业如何顺势而为
- Asynchronous, email and scheduled tasks
- 【C语言】指针与数组笔试题详解
- MySQL --- 数据库查询 - 条件查询
- 465. 最优账单平衡 DFS 回溯
- First hand evaluation of Reza electronics rz/g2l development board
- Cut point of undirected graph
- Key wizard hit strange learning - automatic path finding back to hit strange points
- Canvas drawing -- bingdd
- MySQL foundation 07-dcl
猜你喜欢
![[AUTOSAR eight OS]](/img/ac/fbc84c077ff9c94c840e1871171d19.png)
[AUTOSAR eight OS]

Excel if formula determines whether the two columns are the same
Trois tâches principales: asynchrone, courrier et timing

拥抱平台化交付的安全理念

1696C. Fishingprince Plays With Array【思维题 + 中间状态 + 优化存储】

Linear programming of mathematical modeling (including Matlab code)

What is needed to develop a domestic arm intelligent edge computing gateway

Correctly distinguish the similarities and differences among API, rest API, restful API and web service
matlab将数字矩阵保存为地理空间数据出错,显示下标索引必须为正整数类型或逻辑类型,解决
【C语言】分支和循环语句(上)
随机推荐
Arduino DY-SV17F自动语音播报
产业互联网的产业范畴足够大 消费互联网时代仅是一个局限在互联网行业的存在
寻找标杆战友 | 百万级实时数据平台,终身免费使用
MySQL foundation 07-dcl
拥抱平台化交付的安全理念
Makefile中wildcard、patsubst、notdir的含义
Machine learning terminology
leetcode 6103 — 从树中删除边的最小分数
[AUTOSAR VI description document]
攻克哈希的基本概念与实现
leetcode 2097 — 合法重新排列数对
安全运营四要素之资产、脆弱性、威胁和事件
按键精灵打怪学习-自动寻路回打怪点
SwiftUI 组件大全之使用 SceneKit 和 SwiftUI 构建交互式 3D 饼图(教程含源码)
Matlab Doppler effect produces vibration signal and processing
Canvas drawing -- bingdd
[introduction to AUTOSAR seven tool chain]
Now that the teenager has returned, the world's fireworks are the most soothing and ordinary people return to work~
MySQL --- 数据库查询 - 基本查询
正确甄别API、REST API、RESTful API和Web Service之间的异同