当前位置:网站首页>[overview of AUTOSAR three RTE]
[overview of AUTOSAR three RTE]
2022-07-03 00:49:00 【Ke Yuqian】
AutoSAR 3、 ... and RTE summary
1 RTE summary
RTE Provides SWC Operating environment .
RTE Its function is a bit like an express transfer station or a telephone operator ( It's the kind in the last world that you have to call the operator first , Then transfer the telephone line to the destination through the operator ), Its function is to make a SWC Information through RTE Connect to other SWC perhaps BSW On . And RTE It has the function of managing this information , For example, received SWC Busy ( The subscriber you dialed is busy ), that RTE Responsible for sending messages SWC wait for , Or do something else ;RTE Also trigger SWC, It's like receiving at this time SWC Sleeping , Sent at this time SWC Send a message , that RTE It is necessary to put the received SWC Wake up .
2 RTE effect
• Provide cross ECU/ECU Internal communication management .
• Provide right runnable Management function of ( Trigger 、 Wake up, etc , In short, it is runnable Need to map to Task Run on , And this mapping is through RTE actualized ).
• We didn't mention before VFB( Virtual function bus ),RTE Namely VFB The concrete realization of .
• stay Vector In the tool chain ,RTE It's generated automatically .
2.1 RTE Yes Runnables Operation support of
- adopt RTE to runnable Provide departure events
- adopt RTE to runnable Provide the required resources
- take BSW and SWC Do isolation
2.1.1 runnable The trigger condition of
• Initialize event : Initialize auto trigger
• Timer event : Give a cycle timer , It's time to trigger
• Receive data event (S/R):Receiver Port Once the data is received , It triggers
• Receive data error event (S/R)
• Data sending completion event (S/R):Send Port Send complete , It triggers
• Operation call event (C/S): When the function is called
• The asynchronous service returns an event (C/S): I said before C/S It can run asynchronously , That is, when I call a Server function , But I call asynchronously .
Then the function to be dropped runs in parallel with the current running program as a thread ,
When the called function finishes running, it returns (Return) When , At this time, the asynchronous service return event is triggered
• Mode switching event
• Mode switching response event
2.2 RTE Yes Ports The support of
2.2.1 features
Play the role SWCs and BSW Communication channels
• As VFB The concrete realization of
• As S/R Communication implementation of interface
• As C/S Communication implementation of interface
• ECU Internal communication / Span ECU( adopt COM)
• Realization AR-COM The callback function of , The concrete realization is in SWC Done in ,RTE Responsible for completing this callback mechanism
Other characteristics
• Provides a mechanism to achieve data consistency
• Support simple and complex data types
• Yes SWC Instantiation of type
2.2.2 S/R Different ways of interface
- Call directly (Direct)
It is equivalent to having a global variable ,runnable You can read and write this variable directly
Std_ReturnType Rte_Read_<port>_<data> (<DataType> *data)
Std_ReturnType Rte_Write_<port>_<data> (<DataType> data)
- Cache call (Buffered)
It is equivalent to copying global variables to a runnable In local variables of , Then operate on this local variable , Finally, assign this local variable to the global variable . stay runnable During the operation of this local variable , Global variables will not change .
<DataType> Rte_IRead_<r>_<port>_<data> (void)
void Rte_IWrite_<r>_<port>_<data> (<DataType> data)
- Queue calls (Queued)
Because there is more than one data , Is a set of queue data , Just like our commonly used serial port FIFO. therefore , You can set cyclic reception or wait for reception , There is timeout management when waiting .
Std_ReturnType Rte_Receive_<port>_<data> (<DataType> *data)
Std_ReturnType Rte_Send_<port>_<data> (<DataType> data)
2.2.3 Span ECU The way
If it is cross ECU Data transmission of . that , I am here runnable Use in Rte_Write__() After such a function , Will need to go :
runnable(ECU1) ->RTE (ECU1) ->BSW (ECU1) -> External bus ->BSW (ECU2) ->RTE (ECU2)->runnable (ECU2)
Com_SendSignal()
Com_ReceiveSignal()
2.2.4 C/S Different ways of interface
A synchronous invocation
Synchronous call is actually the same function we usually call , It is equivalent to embedding the called function code into the currently called function code to run
// Suppose our called function is :
Std_ReturnType RunnableServer(int *param)
// The calling function that our customers should write is :
Std_ReturnType Rte_Call_<Port>_RunnableServer(int *param)
// This param Is the variable we want to be manipulated by the called function
Asynchronous call
An asynchronous call is equivalent to having two threads , A thread runs the contents of our original function , The other is to execute the content of the called function . Then you can read the return result of the called function after a period of time
How to know whether the called function is finished ? There are three ways :
- Cycle test , Just wait there , Wait until the value is returned , In this case, it is almost the same as synchronization , It doesn't make much sense
- Timeout detection , Set a time , When the time comes, read , Continue to run my program before it arrives
- Events trigger , When the service function is finished ,RTE Can trigger the original function , Tell it that the called function is finished , You can read the return value
// After executing the following function, you can return the parameters
Std_ReturnType Rte_Result_<Port>_RunnableServer(int *param)
2.3 RTE Management of data consistency
Data consistency , When multiple users try to access a database at the same time , When their transactions use the same data at the same time , There are four possible scenarios : Lost update 、 Undetermined correlation 、 Inconsistent analysis and fantasy reading .
Implementation mechanism of data consistency :
utilize RTE management
SWC Internal variables
• EAs(ExclusiveAreas, Dedicated area ): It is the following two sentences of code , Equivalent to an off interrupt , The statements that call variables are placed inside , The runtime cannot have more advanced Task Break the protected statement
......
Rte_Enter_<name>();
// Put protected statements here
Rte_Exit_<name>();
......
• IRVs(Inter-runnablevariables, Cross functional variables ): Or two sentences of code , above EAs The whole code segment is protected , The two sentences here are equivalent to being protected when changing variables , That is, when these two sentences are executed, they are protected .
Rte_IrvWrite_<re>_<name>()
Rte_IrvRead_<re>_<name>()
2.4 RTE Yes Interface Interface
2.4.1 AutoSAR Interface
As I said before S/R and C/S The interface is AutoSAR Interface
characteristic :
The interface function name is variable , For example, as I said before Std_ReturnType Rte_Read__ (
*data) In this form S/R function , Among them It is the name configured by the user , therefore , The function names of these interfaces can be changed , But the general form is unchanged .
Location :
SWC<>RTE、RTE<>CDD、RTE<>ECU AB
- ( Here's a word ,ECU AB I didn't talk about , In fact, many sensors 、 The actuators are all here , yes ECU The abstraction of , It can also be seen as SWC Of ,IoHwAb It's in here ). To be clear , As long as it can be regarded as SWC To deal with the , Namely AutoSAR Interface
2.4.2 Standard interface

AutoSAR Stipulated C Language API
characteristic :
The interface function name is fixed , yes AutoSAR Stipulated .
such as :Com_SendSignal() WaitEvent() These are API Function name , There can be upper layer calls ,
But it is usually generated by using tool configuration , Those who do upper level applications generally don't care about their specific implementation
Location :
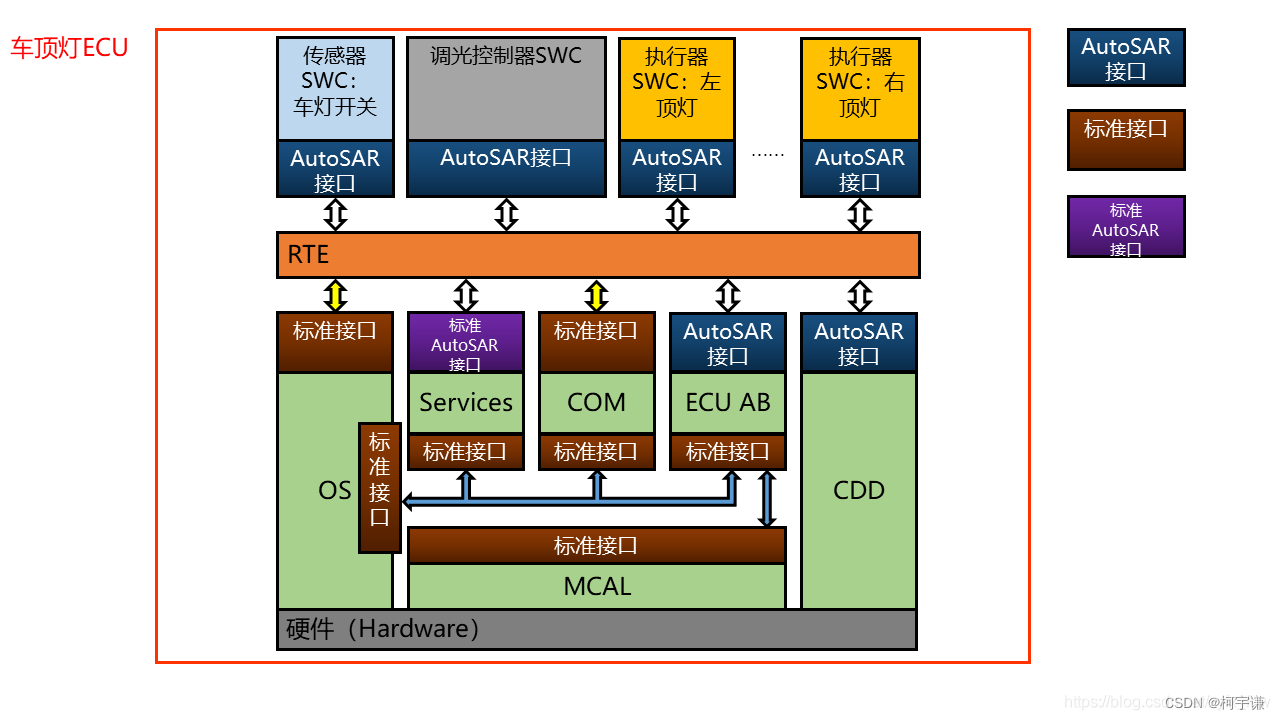
The brown one in the figure is the standard interface , To put it bluntly, it's about functions API Call to .
One thing that needs special explanation is : The arrows in the two red circles in the figure below ,OS and COM It is the only two standard interfaces that allow direct and RTE Connected .
because RTE Many functions of the need to be based on these two modules to achieve ```
2.4.3 standard AutoSAR Interface
AutoSAR Interface , But the name is by AutoSAR Official regulations cannot be modified
characteristic :
Standard interfaces and AutoSAR The characteristics of the interface have some .
The first is and AutoSAR As the interface , What is offered is C/S、S/R Interface ; Then it is the same as the standard interface , The function name is immutable .
To put it bluntly, it is officially stipulated C/S、S/R Interface , Let's take it as AutoSAR Interface is fine , Never mind the function name
Location :
RTE<>Services, Just such a place
边栏推荐
- 【AutoSAR 十二 模式管理】
- Wechat applet obtains the information of an element (height, width, etc.) and converts PX to rpx.
- AttributeError: ‘tuple‘ object has no attribute ‘layer‘问题解决
- mysql 多表联合删除
- leetcode-871:最低加油次数
- leetcode-2115:从给定原材料中找到所有可以做出的菜
- Leetcode-224: basic calculator
- One of the reasons why setinterval timer does not take effect in ie: the callback is the arrow function
- Shell 实现文件基本操作(切割、排序、去重)
- [shutter] image component (load network pictures | load static pictures | load local pictures | path | provider plug-in)
猜你喜欢
指针初阶(基础)

leetcode-2280:表示一个折线图的最少线段数

How to systematically learn machine learning
Two common methods and steps of character device registration

瑞萨RZ/G2L 处理器简介|框架图|功耗|原理图及硬件设计指南

Rust ownership (very important)

Linux Software: how to install redis service

leetcode-849:到最近的人的最大距离

Is there a free text to speech tool to help recommend?

Shell 实现文件基本操作(sed-编辑、awk-匹配)
随机推荐
Preview word documents online
leetcode-2280:表示一个折线图的最少线段数
【luogu P4320】道路相遇(圆方树)
如何系统学习机器学习
Rust所有权(非常重要)
飞凌搭载TI AM62x的ARM核心板/开发板首发上市,亮相Embedded World 2022
[MCU project training] eight way answering machine
logback配置文件
AttributeError: ‘tuple‘ object has no attribute ‘layer‘问题解决
Nc17059 queue Q
How to systematically learn machine learning
leetcode-849:到最近的人的最大距离
1.11 - 总线
【日常训练】871. 最低加油次数
Shell 实现文件基本操作(sed-编辑、awk-匹配)
The difference between tail -f, tail -f and tail
指针进阶(一)
Vulkan performance and refinement
File operation io-part2
Logback configuration file