当前位置:网站首页>ROS问题及解决方案——依赖包安装以及无法修正错误
ROS问题及解决方案——依赖包安装以及无法修正错误
2022-07-26 15:29:00 【华为云】
1. 问题描述
在ROS编译过程中经常会遇到找不到ROS包的情况,如下所示
CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package): Could not find a package configuration file provided by "gazebo_plugins" with any of the following names: gazebo_pluginsConfig.cmake gazebo_plugins-config.cmake Add the installation prefix of "gazebo_plugins" to CMAKE_PREFIX_PATH or set "gazebo_plugins_DIR" to a directory containing one of the above files. If "gazebo_plugins" provides a separate development package or SDK, be sure it has been installed.2.解决方案
在ROS wiki上有这么一段话,可能很多人都将他忽略了
单个软件包安装: 你也可以安装某个指定的ROS软件包(使用软件包名称替换掉下面的PACKAGE):
sudo apt-get install ros-kinetic-PACKAGE例如:
sudo apt-get install ros-kinetic-slam-gmapping这段话的意思就是:
当你需要安装ROS的依赖包时,可以使用sudo apt-get install ros-kinetic-PACKAGE命令,其中
sudo是root用户的意思,apt-get install是代表要安装软件,ros-kinetic-PACKAGE是依赖包的名字(其中ros-kinetic-代表是ROS的依赖包,kinetic是你所使用ROS版本名字,PACKAGE是需要替换的地方,指的是依赖包的名字)
例如,针对问题中的依赖包,使用如下命令(所缺的包存在下划线也转为-)
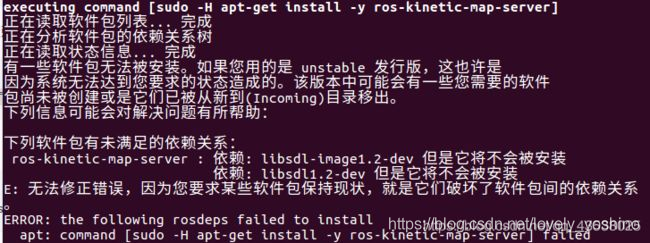
sudo apt-get install ros-kinetic-gazebo-plugins3. E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
把系统设置 更新都选中: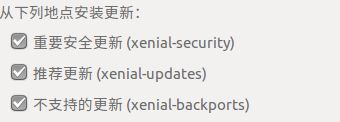
然后sudo apt-get update
边栏推荐
- Data preprocessing of data mining
- 请问参数化视图可以根据传入参数的特点得到不同行数的SQL吗?比如这里我想根据传输参数@field中列
- anaconda No module named ‘cv2‘
- Promise, async await and the solution of cross domain problems -- the principle of proxy server
- 组件化开发基本规范、localStorage 和 sessionStorage、对象数据转基本值、原型链使用
- Is there any need for livedata to learn—— Jetpack series (2)
- R language uses LM function to build multiple linear regression model, writes regression equation according to model coefficient, and uses fitted function to calculate y value (response value) vector
- LeetCode_ Prefix and_ Hash table_ Medium_ 525. Continuous array
- Pytorch installation CUDA corresponding
- Digital commerce cloud: lead the digital upgrading of chemical industry and see how Mobei can quickly open up the whole scene of mutual integration and interoperability
猜你喜欢
![[leave some code] Apply transformer to target detection, and understand the model operation process of the model through debug](/img/71/068de34da9d1e6041237d936314e14.png)
[leave some code] Apply transformer to target detection, and understand the model operation process of the model through debug

Strengthen the defense line of ecological security, and carry out emergency drills for environmental emergencies in Guangzhou

【5分钟Paper】Pointer Network指针网络

Sklearn clustering clustering
![[expdp export data] expdp exports a table with 23 rows of records and no lob field. It takes 48 minutes. Please help us have a look](/img/ee/7bec8211dddc90e52c2bc0f56c8dd4.png)
[expdp export data] expdp exports a table with 23 rows of records and no lob field. It takes 48 minutes. Please help us have a look

【五分钟Paper】基于参数化动作空间的强化学习
采购实用技巧,5个瓶颈物料的采购方法

Qt最基本的布局,创建window界面
.NET 手动获取注入对象
FTP协议
随机推荐
Enterprise digital transformation needs in-depth research, and it cannot be transformed for the sake of transformation
我们被一个 kong 的性能 bug 折腾了一个通宵
SettingWithCopyWarning: A value is trying to be set on a copy of a slice from a DataFrame
拒绝噪声,耳机小白的入门之旅
单例模式
FOC学习笔记-坐标变换以及仿真验证
TI C6000 TMS320C6678 DSP+ Zynq-7045的PS + PL异构多核案例开发手册(2)
软测(七)性能测试(1)简要介绍
cs224w(图机器学习)2021冬季课程学习笔记5
反射、枚举以及lambda表达式
Digital warehouse: iqiyi digital warehouse platform construction practice
超简单!只需简单几步即可为TA定制天气小助理!!
教程篇(7.0) 05. 通过FortiClient EMS发放FortiClient * FortiClient EMS * Fortinet 网络安全专家 NSE 5
Promise, async await and the solution of cross domain problems -- the principle of proxy server
关于我写的IDEA插件能一键生成service,mapper....这件事(附源码)
【LeetCode】33、 搜索旋转排序数组
TI C6000 TMS320C6678 DSP+ Zynq-7045的PS + PL异构多核案例开发手册(3)
How to convert planning map into vector data with longitude and latitude geojson
gcc/g++与动静库以及gdb
USB转串口参数配置功能