当前位置:网站首页>Nuscenes configuration information about radar
Nuscenes configuration information about radar
2022-06-29 14:14:00 【naca yu】
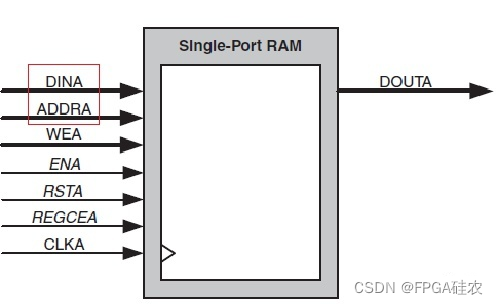
Nuscenes The part about radar processing :

- The above contains sensor performance information :
radar Detection distance :≤250m
77GHz Electromagnetic wave frequency
Speed accuracy ±0.1km/h
13Hz Working frequency of
Multi view visualization of radar point cloud
Nuscenes Multi view visualization of millimeter wave radar
Format definition
- contain nuscenes Internal data radar Data format 、 Data units
- Radar pre filtering and non filtering modes are defined internally
- About internal format :
FIELDS x y z dyn_prop id rcs vx vy vx_comp vy_comp is_quality_valid ambig_state x_rms y_rms invalid_state pdh0 vx_rms vy_rms
SIZE 4 4 4 1 2 4 4 4 4 4 1 1 1 1 1 1 1 1
TYPE F F F I I F F F F F I I I I I I I I
The source code section :/nuscenes/utils/data_classes.py
class RadarPointCloud(PointCloud):
# Class-level settings for radar pointclouds, see from_file().
invalid_states = [0] # type: List[int]
dynprop_states = range(7) # type: List[int] # Use [0, 2, 6] for moving objects only.
ambig_states = [3] # type: List[int]
@classmethod
def disable_filters(cls) -> None:
""" Disable all radar filter settings. Use this method to plot all radar returns. Note that this method affects the global settings. """
cls.invalid_states = list(range(18))
cls.dynprop_states = list(range(8))
cls.ambig_states = list(range(5))
@classmethod
def default_filters(cls) -> None:
""" Set the defaults for all radar filter settings. Note that this method affects the global settings. """
cls.invalid_states = [0]
cls.dynprop_states = range(7)
cls.ambig_states = [3]
@staticmethod
def nbr_dims() -> int:
""" Returns the number of dimensions. :return: Number of dimensions. """
return 18
@classmethod
def from_file(cls,
file_name: str,
invalid_states: List[int] = None,
dynprop_states: List[int] = None,
ambig_states: List[int] = None) -> 'RadarPointCloud':
""" Loads RADAR data from a Point Cloud Data file. See details below. :param file_name: The path of the pointcloud file. :param invalid_states: Radar states to be kept. See details below. :param dynprop_states: Radar states to be kept. Use [0, 2, 6] for moving objects only. See details below. :param ambig_states: Radar states to be kept. See details below. To keep all radar returns, set each state filter to range(18). :return: <np.float: d, n>. Point cloud matrix with d dimensions and n points. Example of the header fields: # .PCD v0.7 - Point Cloud Data file format VERSION 0.7 FIELDS x y z dyn_prop id rcs vx vy vx_comp vy_comp is_quality_valid ambig_state x_rms y_rms invalid_state pdh0 vx_rms vy_rms SIZE 4 4 4 1 2 4 4 4 4 4 1 1 1 1 1 1 1 1 TYPE F F F I I F F F F F I I I I I I I I COUNT 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 WIDTH 125 HEIGHT 1 VIEWPOINT 0 0 0 1 0 0 0 POINTS 125 DATA binary Below some of the fields are explained in more detail: x is front, y is left vx, vy are the velocities in m/s. vx_comp, vy_comp are the velocities in m/s compensated by the ego motion. We recommend using the compensated velocities. invalid_state: state of Cluster validity state. (Invalid states) 0x01 invalid due to low RCS 0x02 invalid due to near-field artefact 0x03 invalid far range cluster because not confirmed in near range 0x05 reserved 0x06 invalid cluster due to high mirror probability 0x07 Invalid cluster because outside sensor field of view 0x0d reserved 0x0e invalid cluster because it is a harmonics (Valid states) 0x00 valid 0x04 valid cluster with low RCS 0x08 valid cluster with azimuth correction due to elevation 0x09 valid cluster with high child probability 0x0a valid cluster with high probability of being a 50 deg artefact 0x0b valid cluster but no local maximum 0x0c valid cluster with high artefact probability 0x0f valid cluster with above 95m in near range 0x10 valid cluster with high multi-target probability 0x11 valid cluster with suspicious angle dynProp: Dynamic property of cluster to indicate if is moving or not. 0: moving 1: stationary 2: oncoming 3: stationary candidate 4: unknown 5: crossing stationary 6: crossing moving 7: stopped ambig_state: State of Doppler (radial velocity) ambiguity solution. 0: invalid 1: ambiguous 2: staggered ramp 3: unambiguous 4: stationary candidates pdh0: False alarm probability of cluster (i.e. probability of being an artefact caused by multipath or similar). 0: invalid 1: <25% 2: 50% 3: 75% 4: 90% 5: 99% 6: 99.9% 7: <=100% """
assert file_name.endswith('.pcd'), 'Unsupported filetype {}'.format(file_name)
meta = []
with open(file_name, 'rb') as f:
for line in f:
line = line.strip().decode('utf-8')
meta.append(line)
if line.startswith('DATA'):
break
data_binary = f.read()
# Get the header rows and check if they appear as expected.
assert meta[0].startswith('#'), 'First line must be comment'
assert meta[1].startswith('VERSION'), 'Second line must be VERSION'
sizes = meta[3].split(' ')[1:]
types = meta[4].split(' ')[1:]
counts = meta[5].split(' ')[1:]
width = int(meta[6].split(' ')[1])
height = int(meta[7].split(' ')[1])
data = meta[10].split(' ')[1]
feature_count = len(types)
assert width > 0
assert len([c for c in counts if c != c]) == 0, 'Error: COUNT not supported!'
assert height == 1, 'Error: height != 0 not supported!'
assert data == 'binary'
# Lookup table for how to decode the binaries.
unpacking_lut = {
'F': {
2: 'e', 4: 'f', 8: 'd'},
'I': {
1: 'b', 2: 'h', 4: 'i', 8: 'q'},
'U': {
1: 'B', 2: 'H', 4: 'I', 8: 'Q'}}
types_str = ''.join([unpacking_lut[t][int(s)] for t, s in zip(types, sizes)])
# Decode each point.
offset = 0
point_count = width
points = []
for i in range(point_count):
point = []
for p in range(feature_count):
start_p = offset
end_p = start_p + int(sizes[p])
assert end_p < len(data_binary)
point_p = struct.unpack(types_str[p], data_binary[start_p:end_p])[0]
point.append(point_p)
offset = end_p
points.append(point)
# A NaN in the first point indicates an empty pointcloud.
point = np.array(points[0])
if np.any(np.isnan(point)):
return cls(np.zeros((feature_count, 0)))
# Convert to numpy matrix.
points = np.array(points).transpose()
# If no parameters are provided, use default settings.
invalid_states = cls.invalid_states if invalid_states is None else invalid_states
dynprop_states = cls.dynprop_states if dynprop_states is None else dynprop_states
ambig_states = cls.ambig_states if ambig_states is None else ambig_states
# Filter points with an invalid state.
valid = [p in invalid_states for p in points[-4, :]]
points = points[:, valid]
# Filter by dynProp.
valid = [p in dynprop_states for p in points[3, :]]
points = points[:, valid]
# Filter by ambig_state.
valid = [p in ambig_states for p in points[11, :]]
points = points[:, valid]
return cls(points)
边栏推荐
猜你喜欢

直觉与实现:Batch Normalization
单端口RAM实现FIFO

Crazy digital collections, the next myth of making wealth?

深度学习的坎坷六十年

传输层 选择性确认 SACK
![[document translation] camouflaged object detection](/img/30/73a927c05173a95cc5a5d51e182e3b.png)
[document translation] camouflaged object detection

Turbulent intermediary business, restless renters

By proxy, by buyout, the wild era of domestic end-to-end travel is waiting for the next "eternal robbery"

微信小程序:大红喜庆版UI猜灯谜又叫猜字谜

Equivalence class partition method for test case design method
随机推荐
MySQL数据库:读写分离
VQA不只需要图片,还需要外部知识!华盛顿大学&微软提出提出REVIVE,用GPT-3和Wikidata来辅助回答问题!...
MySQL数据库:分区Partition
[network bandwidth] Mbps & Mbps
MySQL 1146 error [easy to understand]
MySQL数据库:存储引擎
I talked about exception handling for more than half an hour during the interview yesterday
靠代理,靠买断,国产端游的蛮荒时代等待下一个《永劫无间》
浅析 Istio——可观测性
Wechat applet: install B artifact and P diagram, modify wechat traffic main applet source code, Download funny joke diagram, make server free domain name
【jenkins】pipeline控制多job顺序执行,进行定时持续集成
广州开展瓶装气安全宣传活动,普及燃气安全知识
文物数字藏品,开启文化传承的新方式
golang7_TCP编程
Can Ruida futures open an account? Is it safe and reliable?
C keyboard hook
Recruiting talents and seeking development | Jincang of the National People's Congress won the "best employer school recruitment case Award"
Redis主从复制原理
BYD has three years left
Crazy digital collections, the next myth of making wealth?