当前位置:网站首页>binlog与iptables防nmap扫描
binlog与iptables防nmap扫描
2022-08-02 14:04:00 【H2223】
MySQL 保证数据不会丢的能力主要体现在两方面:
- 能够恢复到任何时间点的状态;
- 能够保证MySQL在任何时间段突然奔溃,重启后之前提交的记录都不会丢失
binlog
1能力可以通过重跑binlog日志来实现
binlog二进制日志,它记录了数据库上的所有改变(记录sql语句),并以二进制的形式保存在磁盘中;
它可以用来查看数据库的变更历史、数据库增量备份和恢复、Mysql的复制(主从数据库的复制)。
redolog
redolog是物理日志,记录的是在某个数据页上做了什么修改
对于第二点的能力,通过redolog来实现,即在 InnoDB 存储引擎中,每执行一条sql语句,就重做日志缓存,在事务提交后,才会刷盘,将日志写入系统缓存,并且每隔一秒就会将日志写入系统缓存,并主动刷盘。
这样在事务提交之前的日志丢了也没什么损失
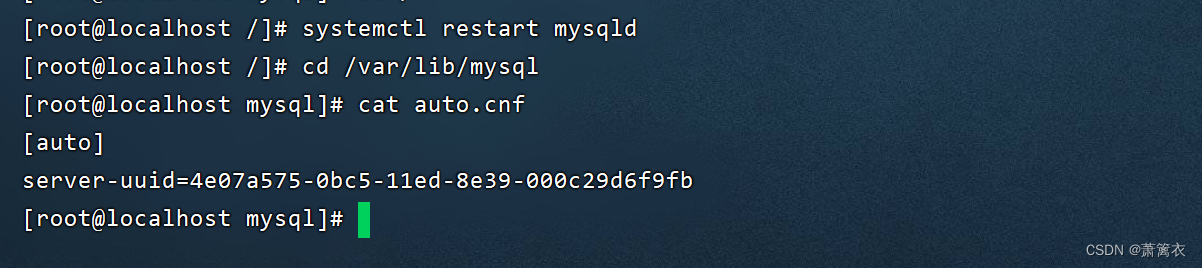
iptables防止nmap扫描
在服务器上配置iptables可以阻止nmap扫描
[[email protected] goaccess-1.5.4]# iptables -t filter -I INPUT -p tcp --tcp-flags ALL FIN,URG,PSH -j REJECT
[[email protected] goaccess-1.5.4]# iptables -t filter -I INPUT -p tcp --tcp-flags SYN,RST SYN,RST -j REJECT
[[email protected] goaccess-1.5.4]# iptables -t filter -I INPUT -p tcp --tcp-flags SYN,FIN SYN,FIN -j REJECT
[[email protected] goaccess-1.5.4]# iptables -t filter -I INPUT -p tcp --tcp-flags ALL SYN -j REJECT
[[email protected] goaccess-1.5.4]# iptables -t filter -R INPUT 1 -s 192.168.80.138 -p tcp --dport 1: --tcp-flags ALL ACK -j REJECT
在kali上验证成果
nmap -sS 192.168.62.129边栏推荐
- ThinkPHP5.0内置分页函数Paginate无法获取POST页数问题的解决办法
- 十分钟带你入门Nodejs
- uni-app页面、组件视图数据无法刷新问题的解决办法
- [ROS](06)ROS通信 —— 话题(Topic)通信
- Deep learning framework pytorch rapid development and actual combat chapter4
- 主存储器(二)
- chapter7
- verilog学习|《Verilog数字系统设计教程》夏宇闻 第三版思考题答案(第十一章)
- C语言初级—数组元素的增删改查
- St. Regis Takeaway Notes - Lecture 10 Swagger
猜你喜欢
Network pruning (1)
C语言日记 4 变量
Raj delivery notes - separation 第08 speak, speaking, reading and writing
Error Correction Design Principle of Hamming Check Code
Unit 5 Hold Status
重新学习编程day1 【初始c语言】【c语言编写出计算两个数之和的代码】
猜数字游戏,猜错10次关机(srand、rand、time)随机数生成三板斧(详细讲解!不懂问我!)
创建&编译ROS软件包Package](/img/c2/5931d5cbade509c6ca34d66a274756.png)
[ROS](02)创建&编译ROS软件包Package
C语言日记 6 基本输入/输出
(ROS) (03) CMakeLists. TXT, rounding
随机推荐
Introduction and use of Haystack
The language of initial
Network pruning (1)
Programming Specifications - LiteOS
原码、补码、反码
uni-app页面、组件视图数据无法刷新问题的解决办法
Unit 4 Routing Layer
二进制乘法运算
Implementation of redis distributed lock and watchdog
verilog学习|《Verilog数字系统设计教程》夏宇闻 第三版思考题答案(第七章)
什么是闭包?闭包的作用?闭包的应用?有什么缺点?
十分钟带你入门Nodejs
verilog学习|《Verilog数字系统设计教程》夏宇闻 第三版思考题答案(第十三章)
uniapp小程序禁止遮罩弹窗下的页面滚动的完美解决办法
利用c语言实现对键盘输入的一串字符的各类字符的计数
Unit 12 associated serialization
window10 lower semi-automatic labeling
c语言用scanf出错不安全的解决办法
Deep learning framework pytorch rapid development and actual combat chapter3
OpenCart迁移到其他服务器