当前位置:网站首页>ROS problems and Solutions - relying on package installation and unable to correct errors
ROS problems and Solutions - relying on package installation and unable to correct errors
2022-07-26 15:54:00 【Hua Weiyun】
1. Problem description
stay ROS It is often encountered in the compilation process that it cannot be found ROS The case of the bag , As shown below
CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package): Could not find a package configuration file provided by "gazebo_plugins" with any of the following names: gazebo_pluginsConfig.cmake gazebo_plugins-config.cmake Add the installation prefix of "gazebo_plugins" to CMAKE_PREFIX_PATH or set "gazebo_plugins_DIR" to a directory containing one of the above files. If "gazebo_plugins" provides a separate development package or SDK, be sure it has been installed.2. Solution
stay ROS wiki There is a passage in the , Maybe many people have ignored him
Single package installation : You can also install a specific ROS software package ( Replace the following with the package name PACKAGE):
sudo apt-get install ros-kinetic-PACKAGEfor example :
sudo apt-get install ros-kinetic-slam-gmapping This passage means :
When you need to install ROS Dependent package , have access to sudo apt-get install ros-kinetic-PACKAGE command , among
sudo yes root User's meaning ,apt-get install Is to install software ,ros-kinetic-PACKAGE Is the name of the dependent package ( among ros-kinetic- Representative is ROS The dependency package of ,kinetic Is what you use ROS Version name ,PACKAGE Is the place that needs to be replaced , It refers to the name of the dependent package )
for example , For the dependent packages in the problem , Use the following command ( The underscore of the missing package is also changed to -)
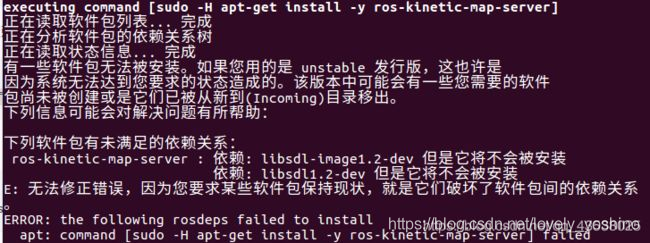
sudo apt-get install ros-kinetic-gazebo-plugins3. E: Unable to fix error , Because you want some packages to be as they are , It's them that break the dependencies between packages .
Set the system All updates are selected :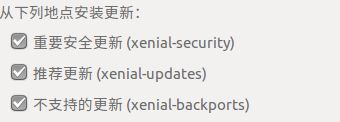
then sudo apt-get update
边栏推荐
- 北京的大学排名
- Super simple! It only takes a few steps to customize the weather assistant for TA!!
- Daily1:SVM
- 04 callable and common auxiliary classes
- Interview with data center and Bi business (IV) -- look at the essence of ten questions
- 开发日常小结(11):文件上传功能改进:中文字符检测与文本内容处理
- 换把人体工学椅,缓解久坐写代码的老腰吧~
- Zynq PS + PL heterogeneous multicore Case Development Manual of Ti C6000 tms320c6678 DSP + zynq-7045 (1)
- [five minute paper] reinforcement learning based on parameterized action space
- API version control [eolink translation]
猜你喜欢

PS + PL heterogeneous multicore case development manual for Ti C6000 tms320c6678 DSP + zynq-7045 (3)
NAT/NAPT地址转换(内外网通信)技术详解【华为eNSP】

数智转型,管理先行|JNPF全力打造“全生命周期管理”平台

ES6高级-查询商品案例
全志A40i工业核心板,100%国产4核ARM Cortex-A7,支持“双屏异显”【显示接口能力,工业HMI首选方案】

拒绝噪声,耳机小白的入门之旅

什么是传输层协议TCP/UDP???

If you want to be good at work, you must first use its tools -c language expansion -- embedded C language (11)

HTB-Apocalyst
.net get injection object manually
随机推荐
No module named ‘win32gui‘
Promise, async await and the solution of cross domain problems -- the principle of proxy server
If you want to be good at work, you must first use its tools -c language expansion -- embedded C language (11)
【LeetCode】33、 搜索旋转排序数组
Glyphicons V3 字体图标查询
信用卡数字识别(opencv,代码分析)
How much help does solid state disk have for game operation
[expdp export data] expdp exports a table with 23 rows of records and no lob field. It takes 48 minutes. Please help us have a look
如何将规划图转成带经纬度的矢量数据geojson
NAT/NAPT地址转换(内外网通信)技术详解【华为eNSP】
81.(cesium之家)cesium修改灰色背景(默认蓝色)
Practical task scheduling platform (scheduled task)
What is a virtual camera
ES6 advanced - query commodity cases
TI C6000 TMS320C6678 DSP+ Zynq-7045的ZYNQ PS + PL异构多核案例开发手册(1)
FTP protocol
Tool skill learning (II): pre skills shell
使用verdaccio搭建自己的npm私有库
kalibr标定realsenseD435i --多相机标定
Basic specification of component development, localstorage and sessionstorage, object data to basic value, prototype chain use