当前位置:网站首页>Small guide for rapid formation of manipulator (VIII): kinematic modeling (standard DH method)
Small guide for rapid formation of manipulator (VIII): kinematic modeling (standard DH method)
2022-07-03 03:19:00 【Lie on me】
Directory :
Quick completion guide of mechanical arm ( zero ): Main contents and analysis methods of the guide
Quick completion guide of mechanical arm ( One ): The development of manipulator
Quick completion guide of mechanical arm ( Two ): Application of mechanical arm
Quick completion guide of mechanical arm ( 3、 ... and ): Mechanical structure of mechanical arm
Quick completion guide of mechanical arm ( Four ): Reducer of key components of mechanical arm
Quick completion guide of mechanical arm ( 5、 ... and ): End actuators
Quick completion guide of mechanical arm ( 6、 ... and ): Stepper motor driver
Quick completion guide of mechanical arm ( 7、 ... and ): Description method of robot arm posture
Quick completion guide of mechanical arm ( 8、 ... and ): Kinematic modeling ( standard DH Law )
One 、 summary
In the last article, we have analyzed the description method of robot arm posture , Then we can officially start the kinematic analysis of it .
Although there are not many objects that make up the manipulator , But its geometric parameters are still complex , each connecting rod The length of 、 Joint installation position and transmission mode, etc , Both affect the position and posture changes of the end of the manipulator and the joint rotation angle ( Joint variables ) The relationship between . therefore , First of all, we need to fix one on each link of the manipulator The connecting rod coordinate system , then , By describing the relationship between these connecting rod coordinate systems Terminal pose And Joint variables associated , This relationship is what we want Kinematic equation , It is obtained in the form of recursion .
First , We need to strip the cocoon step by step , The actual manipulator is abstracted as its kinematic model , As shown in the figure below .

1.1 connecting rod
Manipulator is a series of rigid bodies connected by joints Motion chain , When establishing kinematic equations , In order to determine the position relationship between two adjacent joint axes of the manipulator , We regard the connecting rod as a rigid body , And use the straight line in space to represent the joint axis .
First, you need to number the connecting rod of the manipulator , We usually define a fixed base as connecting rod 0, The first movable connecting rod is connecting rod 1, And so on , The end link of the manipulator is defined as connecting rod n, As shown in the figure below .

1.2 The joints
The motion pair formed by two components through surface contact is called Low side , The following figure shows six commonly used low pair joints .
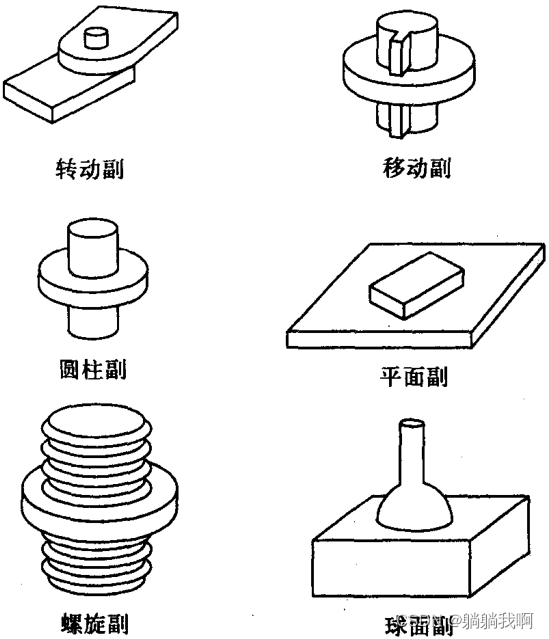
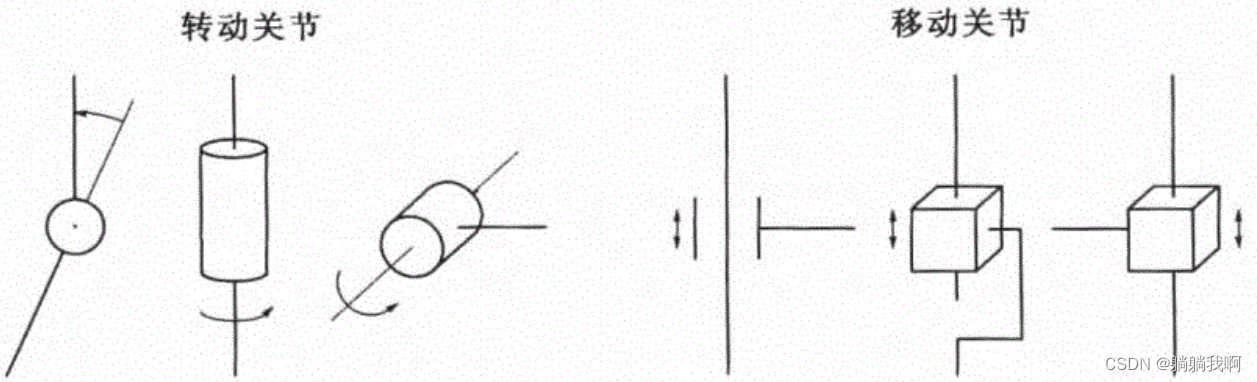
When designing the manipulator , We usually prefer joints with one degree of freedom . Above picture , The degrees of freedom of the rotating pair and the moving pair are the same , They correspond to rotating joints and moving joints respectively , The common representation of the two is shown in the figure below .
As shown in the figure below ,SCARA The first three joints of the manipulator are rotary joints , The fourth joint is the mobile joint .

It should be noted that : The type of joint determines the type of joint variable .
Two 、Denavit-Hartenberg Law

DH Method is a commonly used rule to define the coordinate system of connecting rod , By J Denavit,RS Hartenberg stay 1956 in .
边栏推荐
- Gavin teacher's perception of transformer live class - rasa project's actual banking financial BOT Intelligent Business Dialogue robot architecture, process and phenomenon decryption through rasa inte
- The series of hyperbolic function in daily problem
- el-tree搜索方法使用
- Model transformation onnx2engine
- Chart. JS multitooltip tag - chart js multiTooltip labels
- Idea format code idea set shortcut key format code
- Elsevier latex submitted the article pdftex def Error: File `thumbnails/cas-email. jpeg‘ not found: using draf
- VS 2019配置tensorRT
- open file in 'w' mode: IOError: [Errno 2] No such file or directory
- Summary of determinant knowledge points in Chapter 1 of Linear Algebra (Jeff's self perception)
猜你喜欢
Limit of one question per day
![MySQL practice 45 lecture [transaction isolation]](/img/a5/5420651d6be51e892976f02be8c43c.png)
MySQL practice 45 lecture [transaction isolation]
![MySQL practice 45 [SQL query and update execution process]](/img/cd/3a635f0c3bb4ac3c8241cb77285cc8.png)
MySQL practice 45 [SQL query and update execution process]

Vs 2019 configuration tensorrt

Pytoch lightweight visualization tool wandb (local)

Pytoch configuration

Vs 2019 configuration du moteur de génération de tensorrt
MySql实战45讲【SQL查询和更新执行流程】

On the adjacency matrix and adjacency table of graph storage

umi 路由拦截(简单粗暴)
随机推荐
MySQL practice 45 [SQL query and update execution process]
Are there any recommended term life insurance products? I want to buy a term life insurance.
Idea format code idea set shortcut key format code
为什么线程崩溃不会导致 JVM 崩溃
Force freeing memory in PHP
The idea cannot be loaded, and the market solution can be applied (pro test)
[Chongqing Guangdong education] cultural and natural heritage reference materials of China University of Geosciences (Wuhan)
403 error displayed when vs cloning
Stop using system Currenttimemillis() takes too long to count. It's too low. Stopwatch is easy to use!
Agile certification (professional scrum Master) simulation exercises
Bigvision code
MySql实战45讲【全局锁和表锁】
复选框的使用:全选,全不选,选一部分
Edit and preview in the back pipe to get the value writing method of the form
@Accessors annotation function specifies that the prefix follows the hump naming
Learning notes of C programming [compiled by Mr. Tan Haoqiang] (Chapter III sequence programming) 04 C sentence
Update and return document in mongodb - update and return document in mongodb
VS code配置虚拟环境
[mathematical logic] normal form (conjunctive normal form | disjunctive normal form | major item | minor item | maximal item | minor item | principal conjunctive normal form | principal disjunctive no
I2C subsystem (I): I2C spec