当前位置:网站首页>Ros2 topic (03): the difference between ros1 and ros2 [02]
Ros2 topic (03): the difference between ros1 and ros2 [02]
2022-07-07 23:19:00 【Mr anhydrous】
7 summary
Continued above :ROS2 project (03):ROS1 and ROS2 The difference between 【01】_
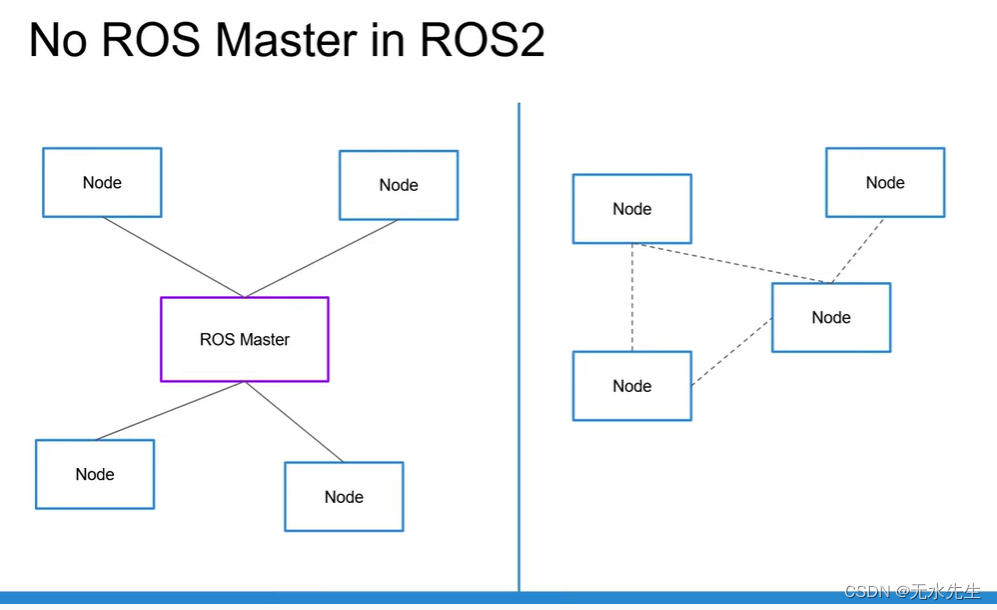
8 ros1 and ros2 Communication mode of
ros2 The abolition of the ros Of Ros-master Server mode , use DDS Distributed communication of Protocol ; The following figure illustrates the differences between their communication modes .
9 Parameter service and management
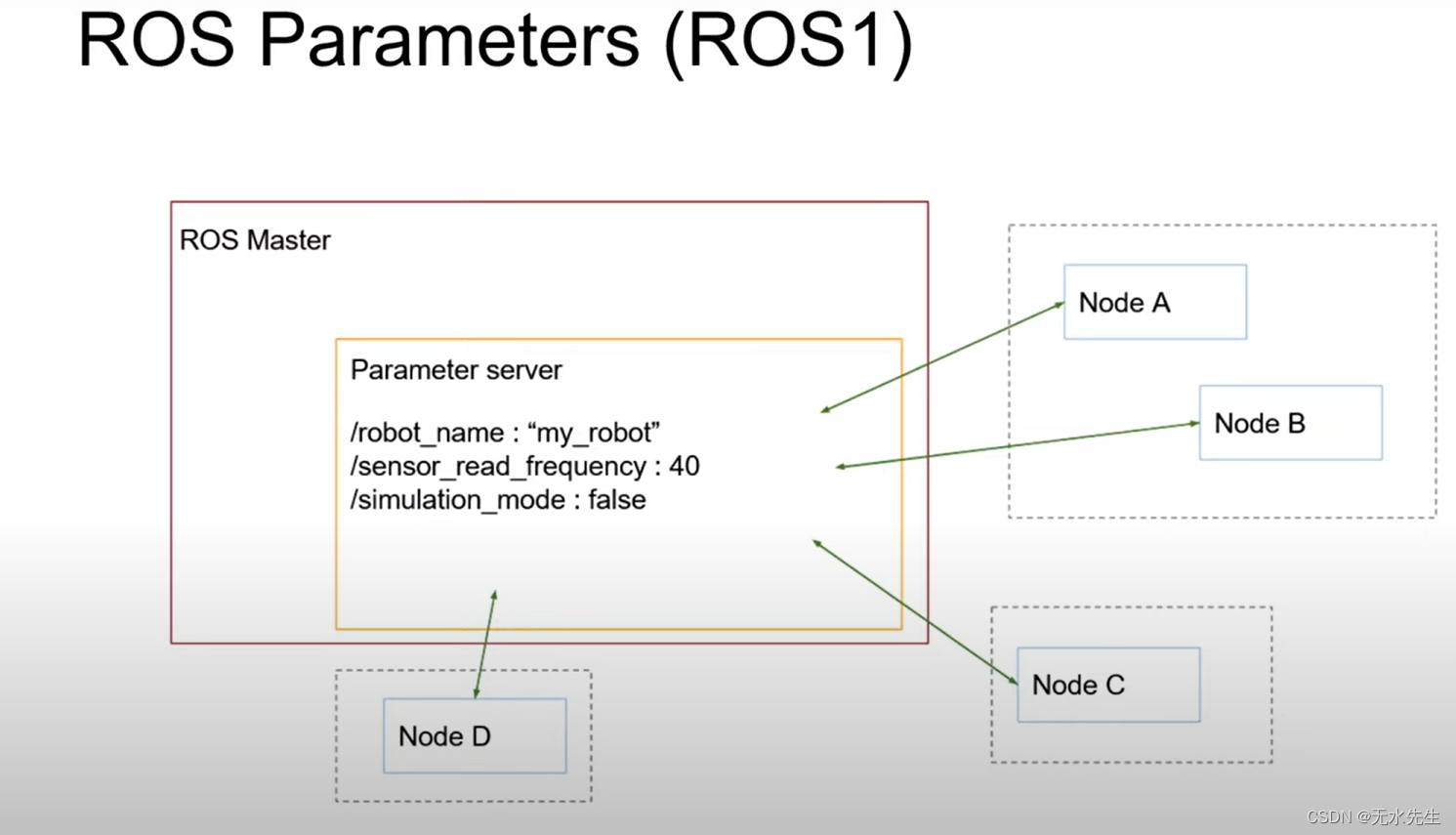
9.1 ros1 Parameter server
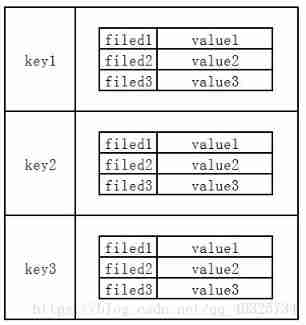
ros1 All parameters of are submitted to ROS-master Inside , Store globally , All nodes are accessible ; Here's the picture :
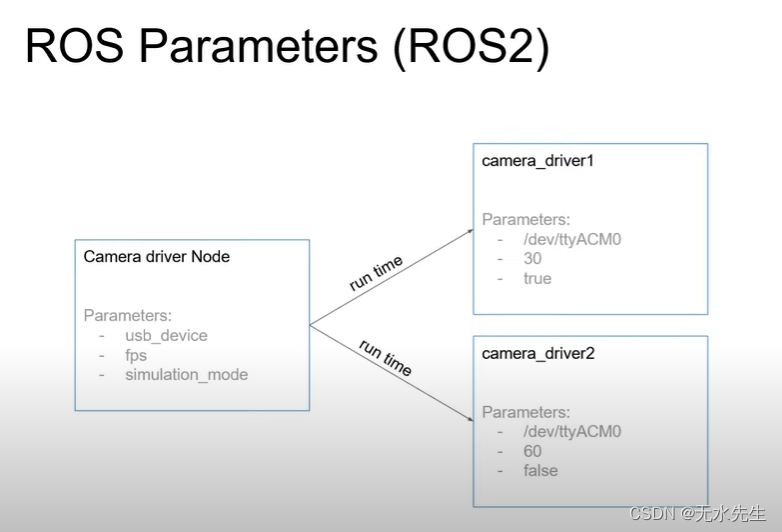
9.2 ros2 Parameter service of
ros2 The parameters of are stored in a special node , Nodes requiring parameters , Can pass Topic Receive parameter information ; This means that the parameter information can be changed in real time , For example, camera hot plug ; contrary , stay Ros1 Replace camera in , Parameters need to be changed ; Therefore, it has to be stipulated “ The camera hardware of this system must be a certain model ”
10 Service mode
ros1 Our service is synchronous ,ros2 Services are asynchronous ; This prevents communication congestion . More flexible is , If ROS2 Also want to achieve synchronous mode , Just choose a parameter .
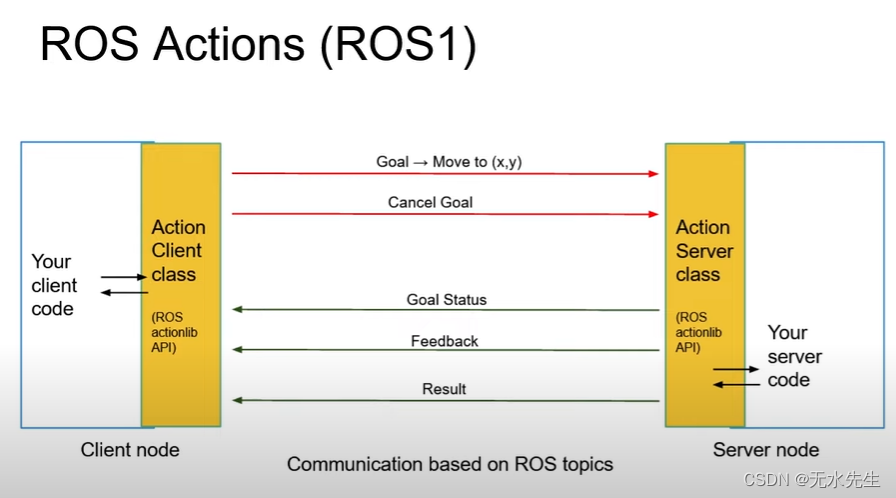
11action signal communication
Action Communication is not about where to send information , It's about controlling certain actions , Like a switch 、 Opening and closing of buttons .ROS1 It is a double grip mobile phone system , and ros2 Change to 3 handshake mechanisms . As follows :
11.1 ros1 Of action
stay ros1 in ,action Service pass Topic Realization .
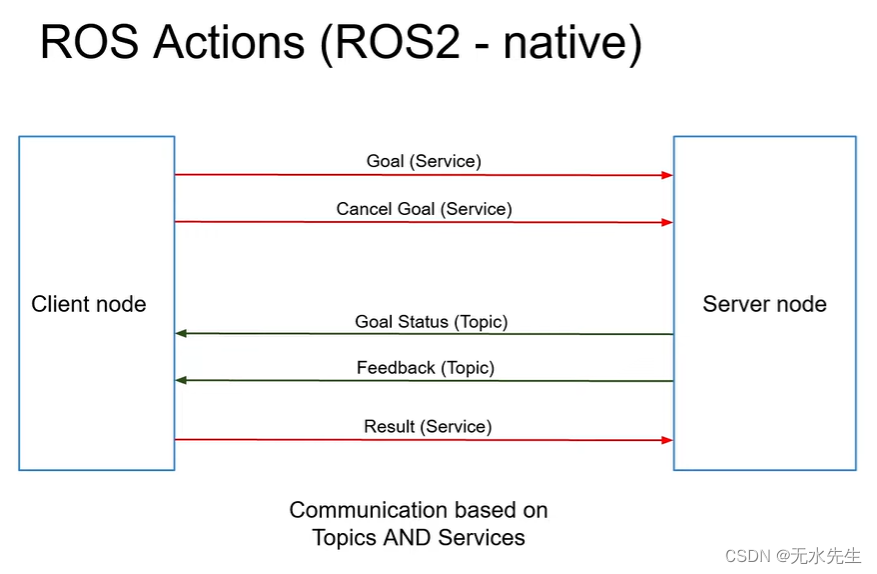
11.2 ROS2 Of action service
12 Custom message
ros2 The custom message of needs to add a namespace .
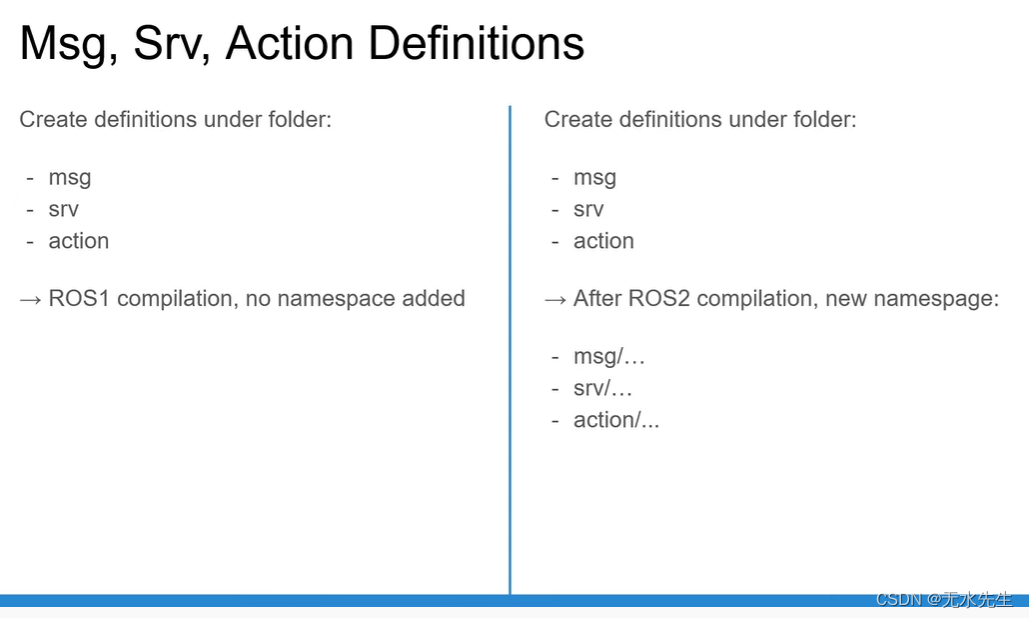
For example, compare ROS1 and ROS2 The customized message of is as follows :
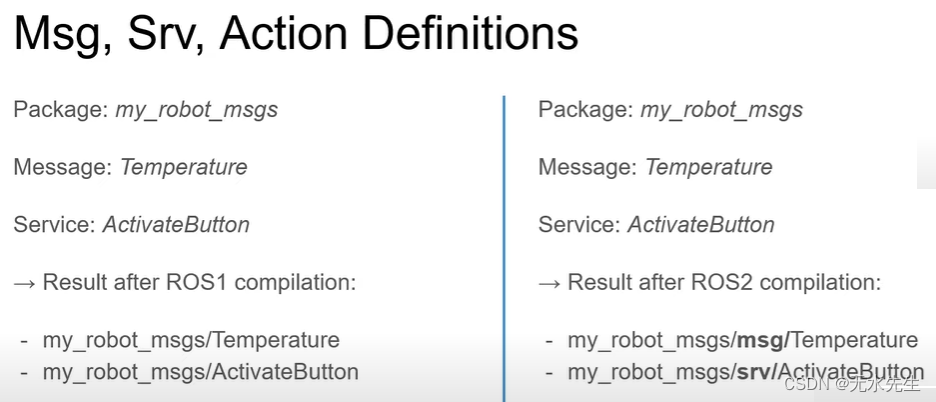
It can be seen that , After compiling , The name of the custom message is slightly different .
13 workspace Compile path
13.1 The compilation places are workspace Underside (src On top of ); But the compilation tools are different :

13.2 ros-tools Different

13.3 ros2 New functions 
边栏推荐
- 微信论坛交流小程序系统毕业设计毕设(4)开题报告
- USB (十八)2022-04-17
- U盘拷贝东西时,报错卷错误,请运行chkdsk
- Brush question 5
- Gee (IV): calculate the correlation between two variables (images) and draw a scatter diagram
- GEE(三):计算两个波段间的相关系数与相应的p值
- Two kinds of curves in embedded audio development
- 微信论坛交流小程序系统毕业设计毕设(6)开题答辩PPT
- Technology at home and abroad people "see" the future of audio and video technology
- Network security -burpsuit
猜你喜欢

UE4_UE5蓝图command节点的使用(开启关闭屏幕响应-log-发布全屏显示)
Unity3D学习笔记5——创建子Mesh
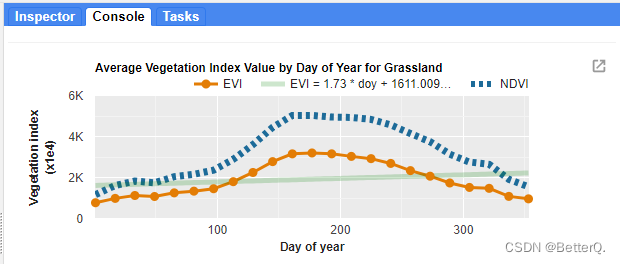
GEE(四):计算两个变量(影像)之间的相关性并绘制散点图
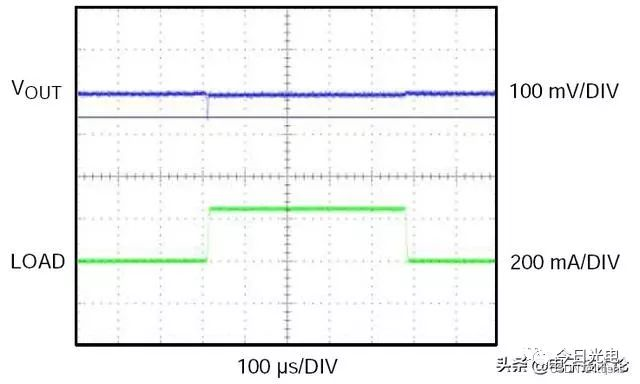
Puce à tension stabilisée LDO - schéma de bloc interne et paramètres de sélection du modèle
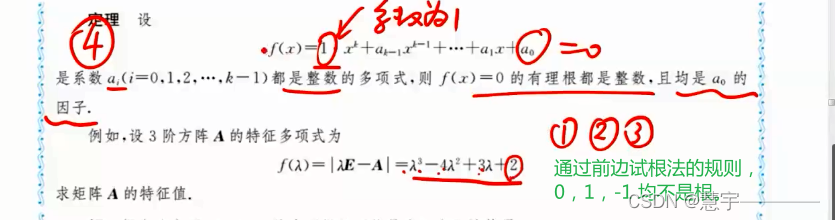
Lecture 30 linear algebra Lecture 5 eigenvalues and eigenvectors
Introduction to redis and jedis and redis things
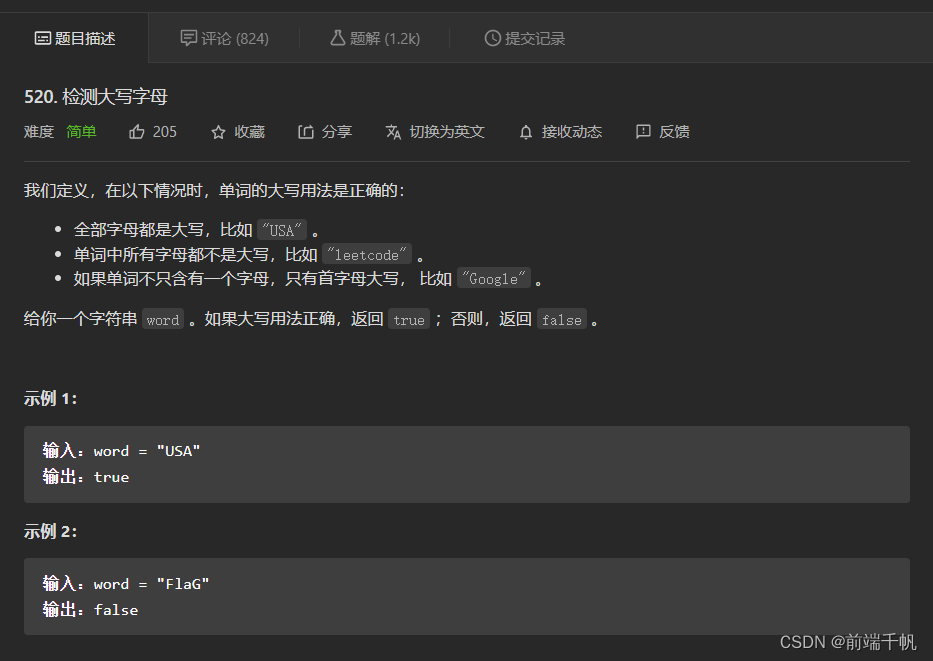
leetcode-520. Detect capital letters -js

STL标准模板库(Standard Template Library)一周学习总结

Cloud native is devouring everything. How should developers deal with it?
在软件工程领域,搞科研的这十年!
随机推荐
CXF call reports an error. Could not find conduct initiator for address:
Circumvention Technology: Registry
Network security - information query of operating system
Talk about the design and implementation logic of payment process
成年人只有一份主业是要付出代价的,被人事劝退后,我哭了一整晚
智慧社區和智慧城市之間有什麼异同
Network security - install CentOS
Inftnews | web5 vs Web3: the future is a process, not a destination
13、 System optimization
Cloud native is devouring everything. How should developers deal with it?
Technology at home and abroad people "see" the future of audio and video technology
FPGA基础篇目录
Wechat forum exchange applet system graduation design completion (6) opening defense ppt
2021ICPC上海 H.Life is a Game Kruskal重构树
LeeCode -- 6. Zigzag transformation
JMeter interface automated test read case, execute and write back result
UE4_UE5全景相机
Install Fedora under RedHat
解决:信息中插入avi格式的视频时,提示“unsupported video format”
The 19th Zhejiang Provincial Collegiate Programming Contest 2022浙江省赛 F.EasyFix 主席树