当前位置:网站首页>How to obtain the coordinates of the aircraft passing through both ends of the radar
How to obtain the coordinates of the aircraft passing through both ends of the radar
2022-07-05 18:13:00 【supermapsupport】
xkf
First, let's talk about the general implementation steps :
- Create a radar scanned entity and define the route of the aircraft ;
- Use the interface of intervisibility analysis to find the position coordinates of the aircraft entering and exiting the radar detection range ;
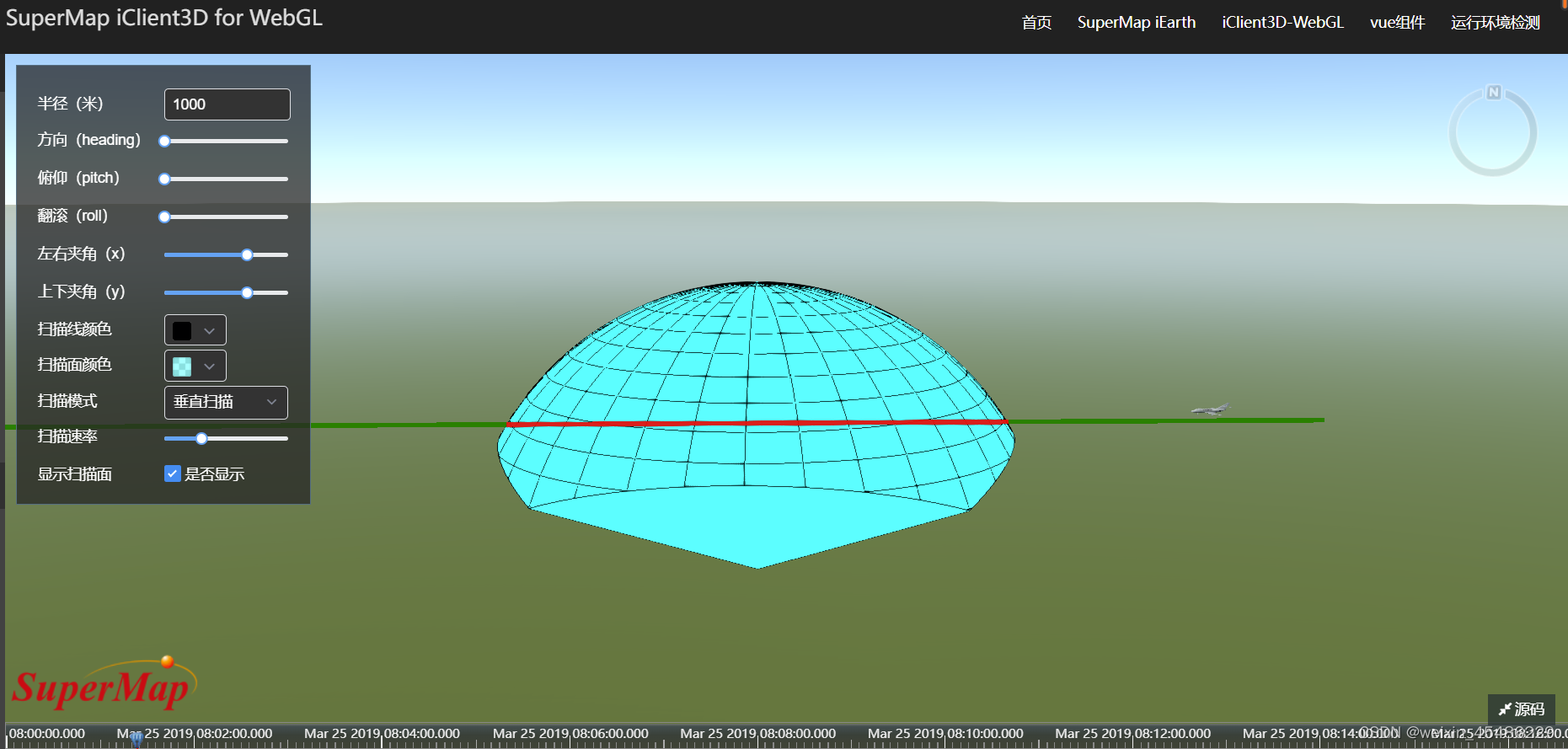
- Use coordinates to build line entities , The radar range is red , Green outside the range .
1. Create a radar scanned entity and define the route of the aircraft
First, create a radar scanning entity , Add radar entities by adding entities .
The main codes are as follows :
let sensorEntity = viewer.entities.add({
position: Cesium.Cartesian3.fromDegrees(116.45093826887725, 39.90558654617389, 14.3030),
rectangularSensor: new Cesium.RectangularSensorGraphics({
radius: new Cesium.CallbackProperty(function () {
return +self.radius;
}, false),
slice: 120,// Degree of segmentation
xHalfAngle: new Cesium.CallbackProperty(function () {
return Cesium.Math.toRadians(self.xHalfAngle);
}, false),// Angle between left and right
yHalfAngle: new Cesium.CallbackProperty(function () {
return Cesium.Math.toRadians(self.yHalfAngle);
}, false),// Angle between top and bottom
lineColor: new Cesium.CallbackProperty(function () {
return Cesium.Color.fromCssColorString(self.lineColor);
}, false),// Line color
material: new Cesium.Color(0.0, 1.0, 1.0, 1),// Uniform material
showScanPlane: new Cesium.CallbackProperty(function () {
return self.scanPlane;
}, false),// Display scanning surface
scanPlaneColor: new Cesium.CallbackProperty(function () {
return Cesium.Color.fromCssColorString(self.scanPlaneColor);
}, false),// Scanning surface color
scanPlaneMode: new Cesium.CallbackProperty(function () {
return self.scanPlaneMode ? 'vertical' : 'horizontal';
}, false),// Vertical scan mode
scanPlaneRate: new Cesium.CallbackProperty(function () {
return self.scanPlaneRate;
}, false),// Scanning rate
showIntersection: true,// Whether to display the scanning line with the earth
showThroughEllipsoid: false// Whether to cross the Earth shows
})
});
Then create an aircraft flight path , Let the plane fly along the line . It uses the clock function to make the aircraft fly along the line .
Main code :
// The plane flew along the line
var startTime = Cesium.JulianDate.fromDate(new Date(2019, 2, 25, 16));
var startPosition = Cesium.Cartesian3.fromDegrees(116.47326309033961, 39.90512322998635, 600);
var endTime = Cesium.JulianDate.addSeconds(startTime, 1000, new Cesium.JulianDate());
var endPosition = Cesium.Cartesian3.fromDegrees(116.4189181104128, 39.903026132659456, 600);
viewer.clock.startTime = startTime.clone();
viewer.clock.stopTime = endTime.clone();
viewer.clock.currentTime = startTime.clone();
viewer.clock.clockRange = Cesium.ClockRange.LOOP_STOP; //Loop at the end
viewer.clock.multiplier = 10;
viewer.timeline.zoomTo(startTime, endTime);
var carPositionProperty = new Cesium.SampledPositionProperty();
carPositionProperty.addSample(startTime, startPosition);
carPositionProperty.addSample(endTime, endPosition);
var carPosition = carPositionProperty.getValue(viewer.clock.currentTime);
var heading = Cesium.Math.toRadians(-3);
var pitch = 0;
var roll = 0;
var hpr = new Cesium.HeadingPitchRoll(heading, pitch, roll);
var orientation = Cesium.Transforms.headingPitchRollQuaternion(carPosition, hpr);
var carModel = viewer.entities.add({
name: "gltf",
position: new Cesium.CallbackProperty(function () {
return carPosition;
}, false),
orientation: orientation,
model: {
uri: "./SampleData/gltf/ The airliner model / The airliner model .gltf",
scale: 60
},
viewFrom: new Cesium.Cartesian3(35, 70, 30)
});
viewer.clock.onTick.addEventListener(function () {
var currentTime = Cesium.JulianDate.clone(viewer.clock.currentTime);
carPosition = carPositionProperty.getValue(currentTime);
});
2. Use the interface of intervisibility analysis to find the position coordinates of the aircraft entering and exiting the radar detection range
Use intervisibility analysis to analyze from the takeoff point to the end point to obtain the coordinates of the first obstacle point close to the takeoff point ; Then, the intervisibility analysis is carried out in turn to obtain the coordinates of the second obstacle point away from the takeoff point :
Main code :
// Coordinates of aircraft take-off end position :
takeOffposition = [116.47326309033961, 39.90512322998635, 560]
finishposition = [116.4189181104128, 39.903026132659456, 560]
setTimeout(function () {
// Intervisibility analysis to judge the point position .
sightline.build();
sightline.lineWidth = 3
// Set observation point
sightline.viewPosition = takeOffposition;
// Set the target point
var flag = sightline.addTargetPoint({
position: finishposition,
name: "point0"
});
}, 200)
// The method of obtaining the obstacle points delays the operation , Because intervisibility analysis takes time
setTimeout(function () {
sightline.getBarrierPoint("point0", function (e) {
positions.fisrtObstacle = e.position
})
// Clear the first intervisibility analysis result .
sightline.removeAllTargetPoint();
sightline.viewPosition = finishposition;
var flag1 = sightline.addTargetPoint({
position: takeOffposition,
name: "point1"
});
}, 300)
setTimeout(function () {
sightline.getBarrierPoint("point1", function (e) {
positions.secondObstacle = e.position
})
sightline.removeAllTargetPoint();
}, 380)
3. Use coordinates to build line entities , The radar range is red , Green outside the range .
This is relatively simple and directly attached with code :
// End position to the second entity out of radar range
viewer.entities.add({
id: "test1",
polyline: {
positions: Cesium.Cartesian3.fromDegreesArrayHeights([positions.secondObstacle.longitude * (180 / Math.PI), positions.secondObstacle.latitude * (180 / Math.PI), positions.secondObstacle.height, finishposition[0], finishposition[1], finishposition[2]]),
width: 4.0,
material: Cesium.Color.GREEN.withAlpha(0.9),
depthFailMaterial: Cesium.Color.GREEN.withAlpha(0.9)
}
});
// Start position to enter the radar range entity
viewer.entities.add({
id: "test2",
polyline: {
positions: Cesium.Cartesian3.fromDegreesArrayHeights([positions.fisrtObstacle.longitude * (180 / Math.PI), positions.fisrtObstacle.latitude * (180 / Math.PI), positions.fisrtObstacle.height, takeOffposition[0], takeOffposition[1], takeOffposition[2]]),
width: 4.0,
material: Cesium.Color.GREEN.withAlpha(0.9),
depthFailMaterial: Cesium.Color.GREEN.withAlpha(0.9)
}
});
// Construct a line entity found between two points
viewer.entities.add({
id: "test3",
polyline: {
positions: Cesium.Cartesian3.fromDegreesArrayHeights([positions.secondObstacle.longitude * (180 / Math.PI), positions.secondObstacle.latitude * (180 / Math.PI), positions.secondObstacle.height, positions.fisrtObstacle.longitude * (180 / Math.PI), positions.fisrtObstacle.latitude * (180 / Math.PI), positions.fisrtObstacle.height]),
width: 4.0,
material: Cesium.Color.RED.withAlpha(0.9),
depthFailMaterial: Cesium.Color.RED.withAlpha(0.9)
}
});
The end result is as follows :
边栏推荐
猜你喜欢
RSE2020/云检测:基于弱监督深度学习的高分辨率遥感图像精确云检测

"Xiaodeng in operation and maintenance" is a single sign on solution for cloud applications
Sophon CE Community Edition is online, and free get is a lightweight, easy-to-use, efficient and intelligent data analysis tool
About Statistical Power(统计功效)
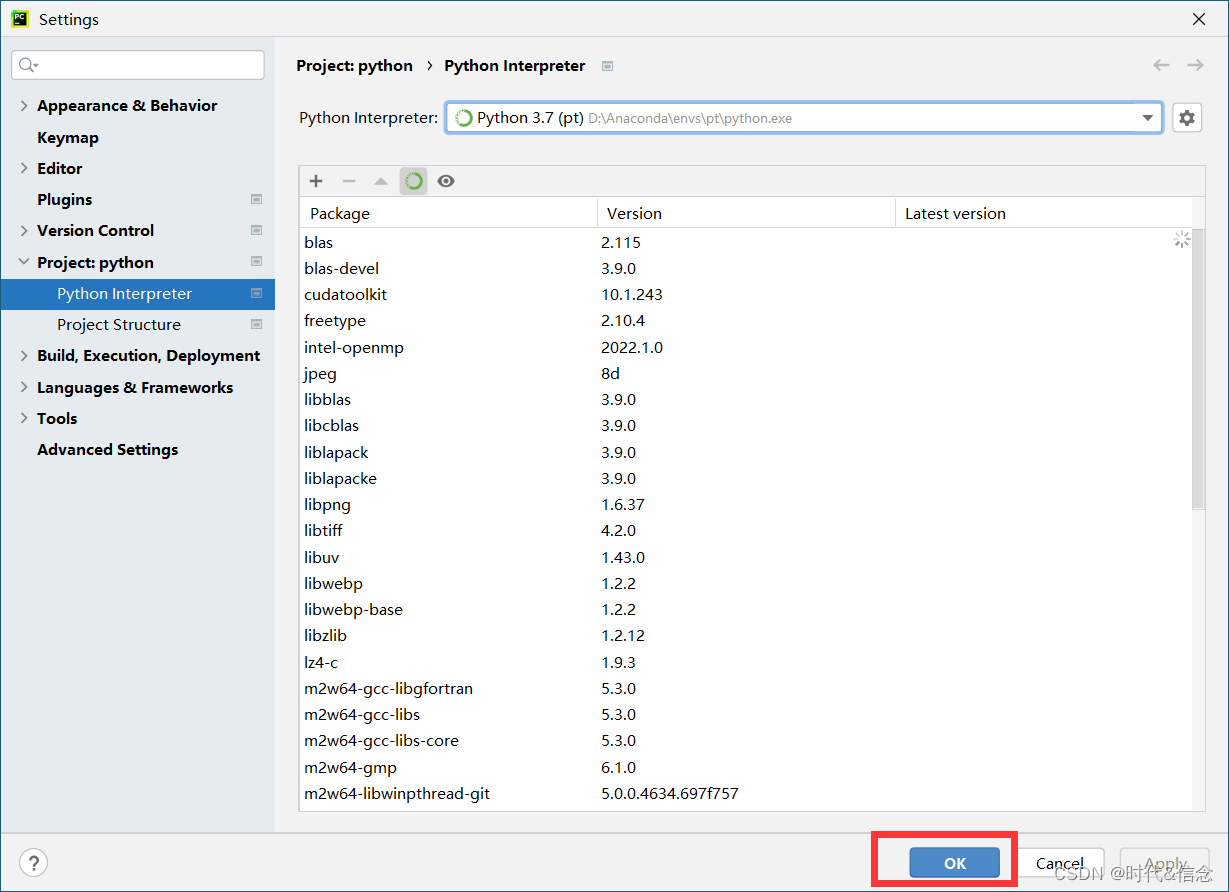
Configure pytorch environment in Anaconda - win10 system (small white packet meeting)

修复漏洞 - mysql 、es

Huaxia Fund: sharing of practical achievements of digital transformation in the fund industry

Nanjing University: Discussion on the training program of digital talents in the new era
图扑软件数字孪生 | 基于 BIM 技术的可视化管理系统

第十一届中国云计算标准和应用大会 | 云计算国家标准及白皮书系列发布 华云数据全面参与编制
随机推荐
使用QT遍历Json文档及搜索子对象
开户复杂吗?网上开户安全么?
Tencent music launched its new product "quyimai", which provides music commercial copyright authorization
[BeanShell] there are many ways to write data locally
第十一届中国云计算标准和应用大会 | 华云数据成为全国信标委云计算标准工作组云迁移专题组副组长单位副组长单位
记一次使用Windbg分析内存“泄漏”的案例
检查命名空间和类
怎么选择外盘期货平台最正规安全?
通过SOCKS代理渗透整个内网
Image classification, just look at me!
如何获取飞机穿过雷达两端的坐标
第十届全球云计算大会 | 华云数据荣获“2013-2022十周年特别贡献奖”
Logical words in Articles
node_exporter内存使用率不显示
matlab内建函数怎么不同颜色,matlab分段函数不同颜色绘图
Sophon CE Community Edition is online, and free get is a lightweight, easy-to-use, efficient and intelligent data analysis tool
Privacy computing helps secure data circulation and sharing
南京大学:新时代数字化人才培养方案探讨
U-Net: Convolutional Networks for Biomedical Images Segmentation
Leetcode exercise - 206 Reverse linked list