当前位置:网站首页>机械臂速成小指南(十二):逆运动学分析
机械臂速成小指南(十二):逆运动学分析
2022-07-07 18:14:00 【躺躺我啊】
指南目录:
********************以下为正文********************
在指南(九)中我们已得出关节变量与末端执行器位姿的函数关系,即正运动学方程。但在实际应用中,我们往往需要通过给定的末端执行器位姿来解算相应的关节变量,以此来确定各关节旋转角度,进而控制机械臂完成在空间中的运动。
一、绪论
1.机械臂逆解的个数
串联机械臂的逆运动学问题的求解较之正运动学问题的复杂度更高。本文所研究的机械臂自由度为6,在逆运动学问题分析过程中需要对齐次变换矩阵![]() 中的相互独立的6个非线性超越方程进行求解。该方程组含有6个未知量,其解的存在性以及解的个数由臂体运动学结构、目标点是否位于灵活工作空间中以及程序中对于关节的限制决定。当存在可行解的情况下,其个数通常不唯一,对于六自由度机械臂而言,最多可能存在16个不同的解,解得个数与DH参数中的a(Oi 与Oi'之间的距离)的关系如下表所示。
中的相互独立的6个非线性超越方程进行求解。该方程组含有6个未知量,其解的存在性以及解的个数由臂体运动学结构、目标点是否位于灵活工作空间中以及程序中对于关节的限制决定。当存在可行解的情况下,其个数通常不唯一,对于六自由度机械臂而言,最多可能存在16个不同的解,解得个数与DH参数中的a(Oi 与Oi'之间的距离)的关系如下表所示。
| ai | 逆解个数 |
| a1=a3=a5=0 | ≤4 |
| a3=a5=0 | ≤8 |
| a3=0 | ≤16 |
| All ai≠0 | ≤16 |
2.pieper判据

显然,在对机械臂逆运动学求解前判断解的存在性具有重要意义。现今研究表明,所有串联型6自由度机械臂均是可解的,但这种解通常只能通过数值解法得到,计算难度大,复杂度高。因此,在确定逆运动学解法前,我们有必要探究机械臂逆运动学问题的解析解是否存在,Pieper判据是机器人领域常用的一种用于判断解析解存在性的判据。
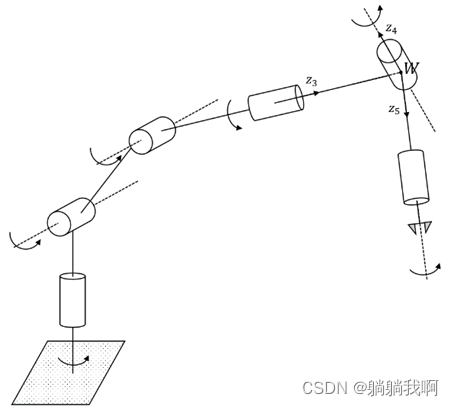
Pieper在其论文中指出:6自由度机械臂存在解析解的充分条件是相邻的三个关节旋转轴相交于一点。为满足这一条件并降低控制成本,市面上的大部分机械臂均依此设计,具有特定的结构,如带有球形腕的机械臂,如下图所示。
二、机械臂逆运动学求解方法
逆运动学的求解
边栏推荐
- 一文读懂数仓中的pg_stat
- One click deployment of any version of redis
- With st7008, the Bluetooth test is completely grasped
- TS quick start - Generic
- Mrs offline data analysis: process OBS data through Flink job
- pom. XML configuration file label: differences between dependencies and dependencymanagement
- vulnhub之Funfox2
- Try the tuiroom of Tencent cloud (there is an appointment in the evening, which will be continued...)
- 4G设备接入EasyGBS平台出现流量消耗异常,是什么原因?
- 使用高斯Redis实现二级索引
猜你喜欢
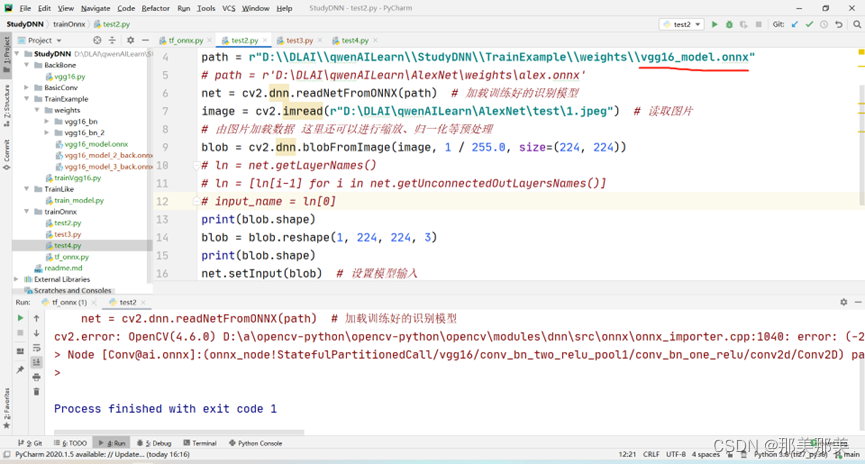
关于cv2.dnn.readNetFromONNX(path)就报ERROR during processing node with 3 inputs and 1 outputs的解决过程【独家发布】
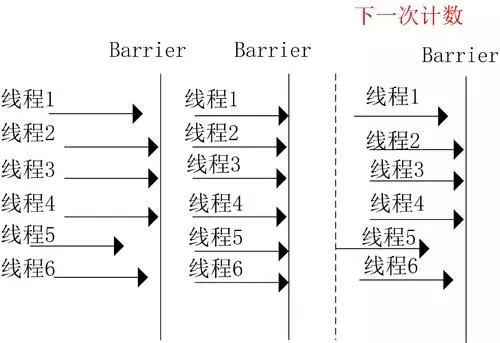
How to cooperate among multiple threads
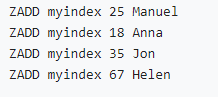
Implement secondary index with Gaussian redis

Chapter 9 Yunji datacanvas was rated as 36 krypton "the hard core technology enterprise most concerned by investors"
大厂经典指针笔试题
CSDN syntax description
CSDN语法说明
Ways to improve the utilization of openeuler resources 01: Introduction

九章云极DataCanvas公司摘获「第五届数字金融创新大赛」最高荣誉!
Force buckle 599 Minimum index sum of two lists
随机推荐
Chapter 9 Yunji datacanvas was rated as 36 krypton "the hard core technology enterprise most concerned by investors"
力扣 599. 两个列表的最小索引总和
如何在软件研发阶段落地安全实践
[MySQL - Basic] transactions
pom. Brief introduction of XML configuration file label function
rk3128投影仪lcd显示四周显示不完整解决
【解决】package ‘xxxx‘ is not in GOROOT
【哲思与实战】程序设计之道
Force buckle 88 Merge two ordered arrays
微服务远程Debug,Nocalhost + Rainbond微服务开发第二弹
About cv2 dnn. Readnetfromonnx (path) reports error during processing node with 3 inputs and 1 outputs [exclusive release]
SQL common optimization
Force buckle 2315 Statistical asterisk
gorilla官方:golang开websocket client的示例代码
Boot 和 Cloud 的版本选型
数据孤岛是企业数字化转型遇到的第一道险关
基于深度学习的目标检测的更新迭代总结(持续更新ing)
Force buckle 1961 Check whether the string is an array prefix
How C language determines whether it is a 32-bit system or a 64 bit system
ASP.NET学习& asp‘s one word