当前位置:网站首页>[QNX Hypervisor 2.2用户手册]9.13 rom
[QNX Hypervisor 2.2用户手册]9.13 rom
2022-07-31 13:49:00 【高桐@BILL】
[QNX Hypervisor 2.2用户手册]专栏目录导航
为VM分配ROM;
语法
rom [start_address,]length
描述
rom组件用于为VM分配ROM,如上语法中,rom在guest-physical中分配由start_address作为起始地址,长度为length字节大小的rom。
这个选项与 ram 选项相同,除了guest不被允许写入此部分存储。典型地,你可以使用选项在guest启动前放置一些初始数据到这个由rom选项指定的区域。
如果你没有指定这个选项,qvm进程会默认会在系统中已分配的最高 RAM/ROM 地址之后立即分配 ROM。
当你指定了length参数时,你可以使用十六进制标记法(例如0xa0000表示640KB),或可读性高的缩写(如1M表示1MB)
注意️
在你使用guest存储的组件之前,你必须分配ROM,(参考“C
边栏推荐
- Shell project combat 1. System performance analysis
- 报错:npm ERR code EPERM
- C#获得网卡信息 NetworkInterface IPInterfaceProperties
- IDEA connects to MySQL database and uses data
- Spark学习:为Spark Sql添加自定义优化规则
- C语言基础练(九九乘法表)与打印不同星号图案
- 对数字化时代的企业来说,数据治理难做,但应该去做
- Istio微服务治理网格的全方面可视化监控(微服务架构展示、资源监控、流量监控、链路监控)
- Four ways to clear the float and its principle understanding
- Use of C# Assembly
猜你喜欢
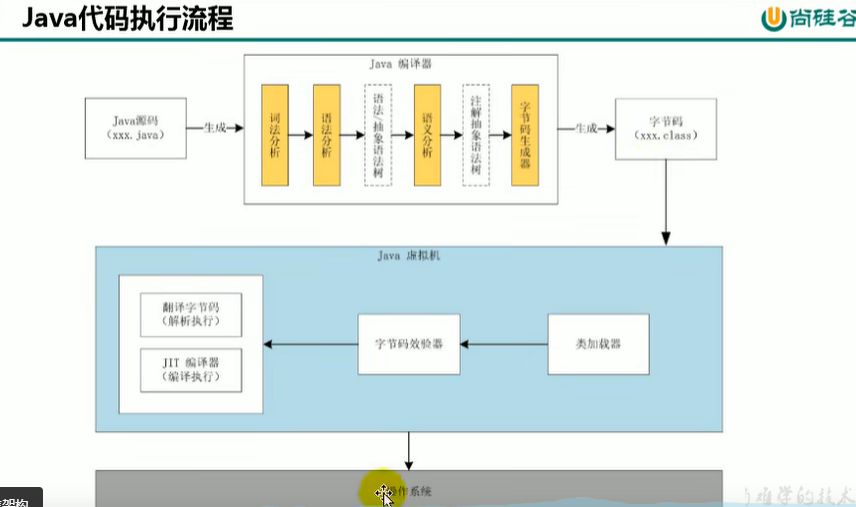
尚硅谷-JVM-内存和垃圾回收篇(P1~P203)

The pre-sale of the new Hyundai Paristi is open, and safety and comfort are not lost
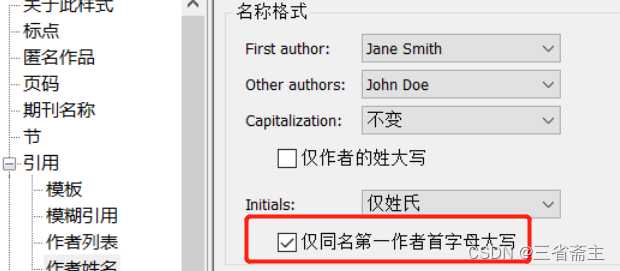
endnote引用
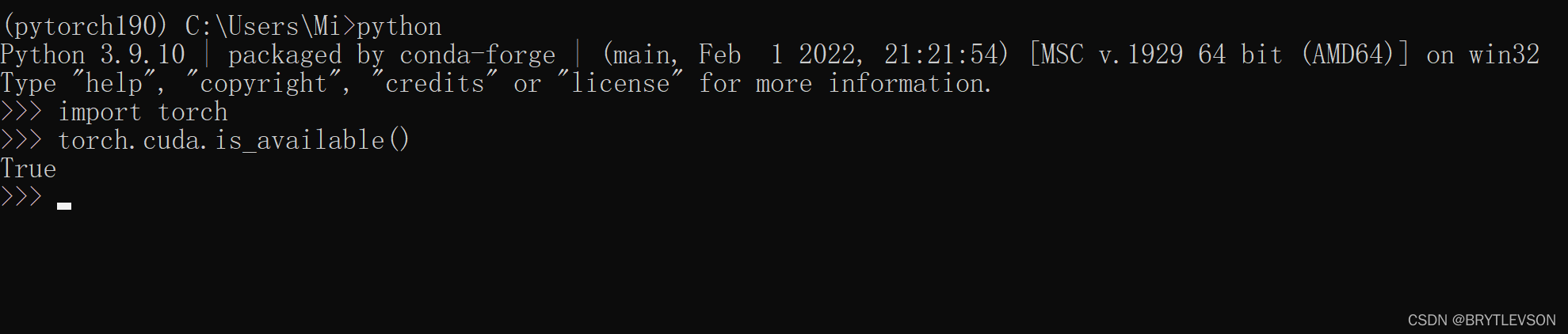
Install the latest pytorch gpu version

C#高级--委托

C#控件CheckBox的使用
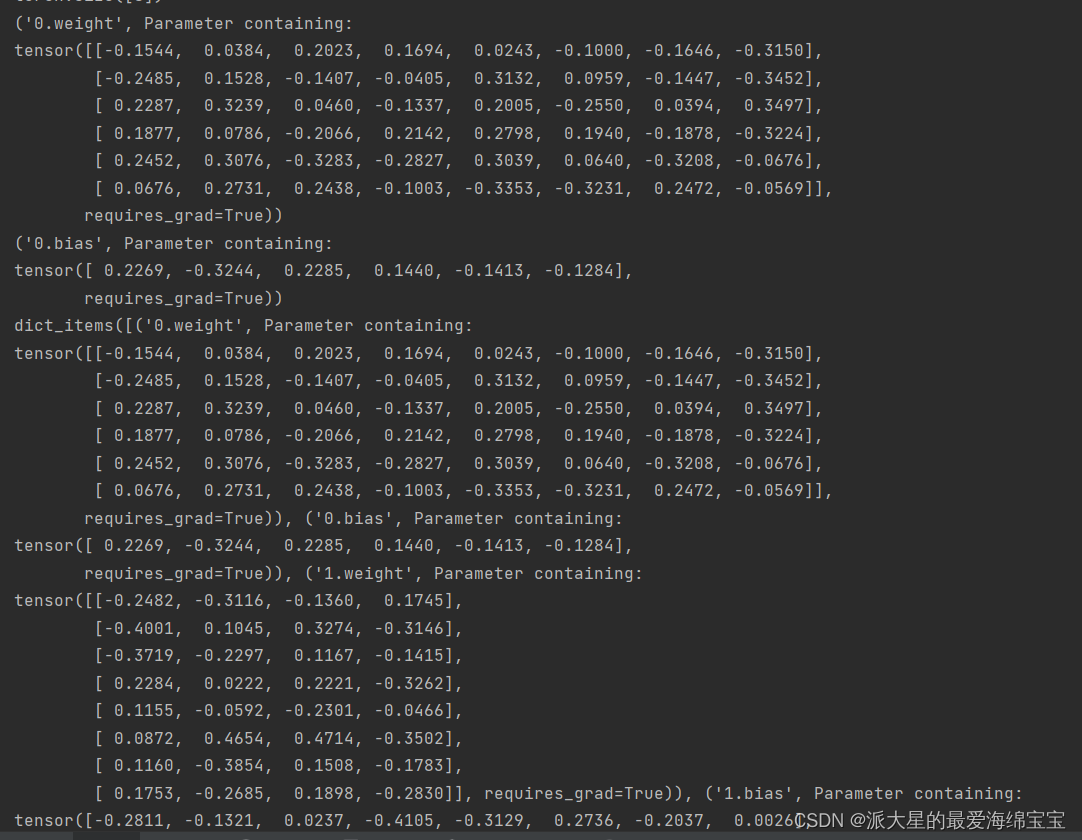
20.nn.Module

IDEA can't find the Database solution

232层3D闪存芯片来了:单片容量2TB,传输速度提高50%

IDEA connects to MySQL database and uses data
随机推荐
golang-gin - graceful restart
纸质说明书秒变3D动画,斯坦福大学吴佳俊最新研究,入选ECCV 2022
How to quickly split and merge cell data in Excel
Comparison of Optical Motion Capture and UWB Positioning Technology in Multi-agent Cooperative Control Research
深度剖析 Apache EventMesh 云原生分布式事件驱动架构
海康摄像机取流RTSP地址规则说明
numpy矩阵和向量的保存与加载,以及使用保存的向量进行相似度计算
Linux bash: redis-server: command not found
hyperf的启动源码分析(二)——请求如何到达控制器
Buffer 与 拥塞控制
ECCV2022: Recursion on Transformer without adding parameters and less computation!
技能大赛训练题:交换机的远程管理
49.【拷贝构造函数与重载】
CLion用于STM32开发
All-round visual monitoring of the Istio microservice governance grid (microservice architecture display, resource monitoring, traffic monitoring, link monitoring)
Batch大小不一定是2的n次幂!ML资深学者最新结论
232层3D闪存芯片来了:单片容量2TB,传输速度提高50%
AWS implements scheduled tasks - Lambda+EventBridge
C#使用ComboBox控件
ECCV 2022 | Robotic Interaction Perception and Object Manipulation