当前位置:网站首页>ROS2自学笔记:机器视觉基础
ROS2自学笔记:机器视觉基础
2022-08-03 02:29:00 【Raine_Yang】
机器视觉是对图像进行识别和处理的技术。一般分为采集图像,分析图像,和输出结果。采集过程即为把光信号转换为数字信号,一般依靠光源和相机。分析过程即为特征提取,标记等操作,最后转化为输出的机器人动作或可视化显示。
安装ros2相机标准节点,该节点读取摄像头信息并发布图像,支持各种类型的usb相机
sudo apt install ros-humble-usb-cam
启动相机节点
ros2 run usb_cam usb_cam_node_exe
启动后可以使用RQT实现图像可视化
rqt -s image-view
-s 代表plugin,即RQT要显示的数据类型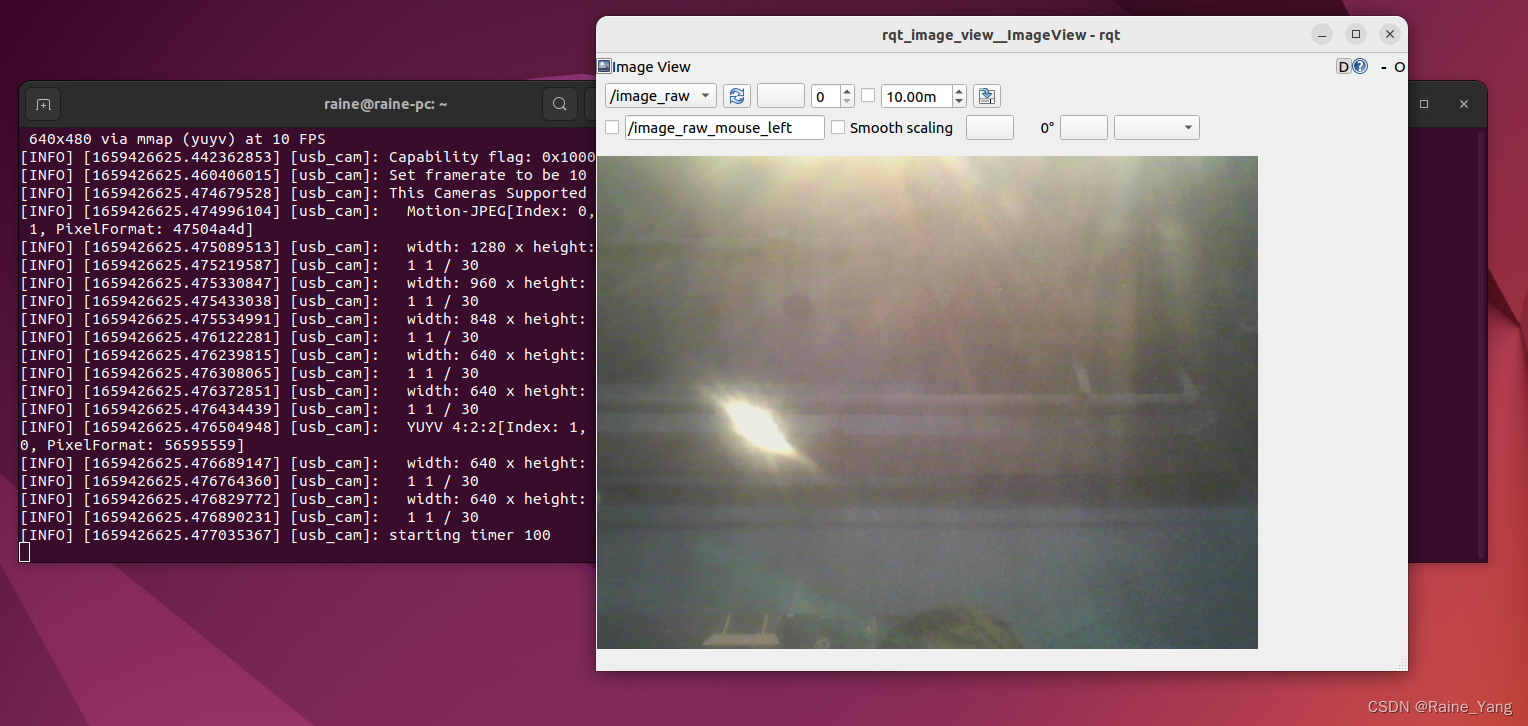
注:要在RQT界面里选择要订阅的话题才能显示图片
image_raw代表原图,原图一般数据量较大,如果要通过无线传输会较慢
image_raw_compressed为压缩后图片,一般可以压缩70%
Image话题详细信息(使用ros2 topic echo /image_raw 查找):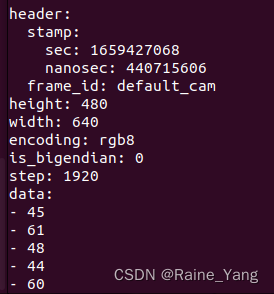
header: 序号,时间戳
height:纵向分辨率
width:横向分辨率
encoding:编码格式
step:一行图像字节量
data:图像具体每个像素点RGB值
边栏推荐
猜你喜欢





随机推荐
[@property enhancement in Objective-C language]
ES6 新特性:Class 的基本语法
简单的布局的初级智能文本提示器
monkey 压测
Likou second week wrong questions collection
zyMedia系列之播放视频
ClickHouse常用函数速查大全
韦东山 数码相框 项目学习(五)libjpeg-turbo的移植
禁用token及无感知更新token功能实现
Jenkins2.328+sonarqube7.9 实现代码自动化检测
YYGH-BUG-06
Usage of permute() function in pytorch
Wei Dongshan Digital Photo Frame Project Learning (5) Transplantation of libjpeg-turbo
MySQL-如何分库分表?一看就懂
05-分布式计算框架
【云原生】阿里云ARMS业务实时监控
C语言实验十一 指针(一)
【云原生】服务行业案例-不可预测的并发场景解决方案
【GO记录】从零开始GO语言——用GO语言做一个示波器(二)基于arduino的简易示波器
在VScode里调试ROS程序