当前位置:网站首页>The newly born robot dog can walk by himself after rolling for an hour. The latest achievement of Wu Enda's first disciple
The newly born robot dog can walk by himself after rolling for an hour. The latest achievement of Wu Enda's first disciple
2022-06-30 20:31:00 【Zhiyuan community】
bright and quick From the Aofei temple
qubits | official account QbitAI
Now? , Let the mechanical dog roll by itself An hour , It can learn to walk !
The gait looks quite modular :
Can also carry Live in a big stick of fierce hatred :
Even if I fell in all directions , Turn over and stand up again :

So it seems , Training mechanical dogs is no different from training ordinary dogs .

This is it. UC The latest results from Berkeley University , Let the robot train and learn directly in the actual environment , No longer dependent on Simulator .
Apply this method , The researchers trained in a short time 4 A robot .
For example, what I saw at the beginning 1 A robot dog who learned to walk when he was young ;
also 2 Mechanical arms , stay 8-10 After hours of actual combat capture , Performance is close to Human level ;
And a small robot with computer vision , Groping by oneself 2 Hours later, , Can scroll smoothly to the specified position .

The study was conducted by Pieter Abbeel And so on ,Pieter Abbeel He was the first doctoral student of Wu Enda , Not long ago, he just got 2021 ACM Calculation Award (ACM Prize in Computing).
at present , All of the software infrastructure for this approach is open source .
A place called “ Dreamer ” The algorithm of
The of this method pipeline It can be roughly divided into 4 Step :

First step , First, put the robot in the real environment , collecting data .
The second step , Transfer the data to Replay Buffer. This step is to use historical data for training 、“ To sum up your experience ”, Use the collected samples efficiently .
The third step ,World Model Will learn from existing experience , then “ Cerebral repair ” Out of strategy .
Step four , And then actors and critics (Actor Critic) Algorithm to improve the performance of the strategy gradient method .
And then go back and forth , Apply the refined method to the robot , In the end, there is a “ Explore and learn by yourself ” The feeling of .
The specific term , The core link here is World Model.
World Models yes 2018 Year by year DAVID HA A kind of Fast unsupervised learning , To obtain the NIPS 2018 Of Oral Presentation.
Its core idea is that human beings are based on existing experience , Form a mental world model , Our decisions and actions are based on this internal model .
For example, when people play baseball , The speed of response is much faster than the visual information conveyed to the brain , Then the reason why the ball can be returned correctly in this case , Because the brain has made instinctive predictions .

before , be based on World Model such “ Cerebral repair ” Learning methods of , Google put forward Dreamer This scalable reinforcement learning approach .
The method proposed this time is based on this , be called DayDreamer.
( It seems that he can be called a visionary ? )
)

The specific term ,World Model It is an agent model .
It includes a visual perception component , The image can be compressed into a low dimensional representation vector as model input .
There is also a memory component , Can be based on historical information , Predict the future representation vector .
Last , It also includes a decision component , It can be based on visual perception components 、 The representation vector of the decision component , Decide what action to take .

Now? , Let's go back to this UC The method proposed by Berkeley scholars .
It's not hard to find out , among World Model Learning Part of the logic is a process of experience accumulation ,Behavior Learning Part is a process of action output .

The method of this paper , It mainly solves the problems in robot training Two aspects The problem of :
Efficiency and accuracy .
Generally speaking , The conventional method of training robots is reinforcement learning , Adjust the operation of the robot through repeated experiments .
But this approach often requires Very large Test of , In order to achieve good results .
Not only is it inefficient , And the cost of training is not low .
later , Many people have proposed to train robots in simulators , It can increase efficiency and reduce cost .
But the author believes that , The simulator training method is accuracy The performance is still not good enough , Only the real environment can make the robot achieve the best effect .
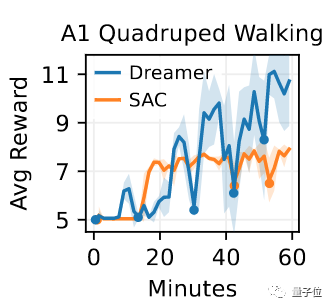
From the results , In the process of training robot dogs , Only the flower 10 minute Time , Robot dogs can adapt to their own behavior .
and SAC Compare the methods , The effect has been significantly improved .
During the training of the manipulator , This new method also overcomes the challenges of visual location and sparse reward , The training results in a few hours are obviously better than other methods .

Research team
It is worth mentioning that , Members of the research team who brought new results this time , It is also very eye-catching .
among ,Pieter Abbeel He is wuenda's first disciple .

He is now UC Berkeley professor of electrical engineering and Computer Science , Director of Berkeley robotics learning laboratory , Berkeley AI Co director of the Institute , Once joined OpenAI.
Not long ago , He also got 2021 ACM Calculation Award (ACM Prize in Computing), In recognition of his contribution to robot learning .
meanwhile , He is still AI Robot company Covariant Co-founder of .

another Ken Goldberg, It's also AI Top experts in the field .

He is now UC Berkeley professor of Engineering , His research direction is reinforcement learning 、 Human computer interaction, etc .
2005 year , He was voted IEEE academician .
meanwhile ,Goldberg And an artist , yes UC Berkeley art 、 Founder of the Symposium on science, technology and culture .
Besides ,Philipp Wu、Alejandro Escontrela、Danijar Hafner Three people work together .
among Philipp Wu It's just UC A senior in Berkeley .
One More Thing
While watching the robot dog training video , We found that the researchers used Unitree Mechanical dog ,

This brand comes from Yushu technology, a Chinese enterprise , The Mavericks who have been on the Spring Festival Gala before , Also from his home .
and , Recently, Yushu robot dog conducted a collective Go1 Test video exposure , It is also popular abroad .
Address of thesis :
https://danijar.com/project/daydreamer/
Reference link :
https://worldmodels.github.io/
边栏推荐
- 【ICCV 2019】特征超分检测:Towards Precise Supervision of Feature Super-Resolution for Small Object Detection
- [try to hack] windows system account security
- 基于slate构建文档编辑器
- 北京大学ACM Problems 1000:A+B Problem
- 杰理之用测试盒配对软件修改注意点【篇】
- 杰理之触摸按键识别流程【篇】
- 1. Introduction to generating countermeasures network
- 以全栈全功能解决方案,应对多样工具复杂环境DevOps落地难题
- Go language identifier and package name specification
- 25: Chapter 3: developing pass service: 8: [registration / login] interface: receiving and verifying "mobile number and verification code" parameters; (it is important to know the application scenario
猜你喜欢

exness:流动性系列-流动性清洗和反转、决策区间

基于开源流批一体数据同步引擎ChunJun数据还原—DDL解析模块的实战分享

为什么一定要从DevOps走向BizDevOps?
Transport layer uses sliding window to realize flow control

To eliminate bugs, developers must know several bug exploration and testing artifacts.

CADD course learning (2) -- target crystal structure information

以全栈全功能解决方案,应对多样工具复杂环境DevOps落地难题

Is the project manager a leader? Can you criticize and blame members?
CADD课程学习(2)-- 靶点晶体结构信息
![Jerry's touch key recognition process [chapter]](/img/cf/8dacbb7f80e427276df6201dddd377.png)
Jerry's touch key recognition process [chapter]
随机推荐
北京大学ACM Problems 1001:Exponentiation
Halcon knowledge: check the measurement objects [1]
【Try to Hack】Windows系统账户安全
Maya house modeling
数据库 OLAP、OLTP是什么?相同和不同?适用场景
断点续传和下载原理分析
By analyzing more than 7million R & D needs, it is found that these eight programming languages are the most needed by the industry
TorchDrug--药物属性预测
Filebeat custom indexes and fields
pytorch实现FLOPs和Params的计算
Detailed steps for Django to upload excel tables and write data to the database
PM这样汇报工作,老板心甘情愿给你加薪
CADD course learning (1) -- basic knowledge of drug design
昨晚 Spark Summit 重要功能发布全在这里(附超清视频)
Jerry's determination of detection sensitivity level [chapter]
Build your own website (20)
QT QStringList用法
Go学习笔记
DEX file parsing - Method_ IDS resolution
杰理之用测试盒配对软件修改注意点【篇】