当前位置:网站首页>rosdep update失败解决办法(亲测有效)
rosdep update失败解决办法(亲测有效)
2022-08-02 03:33:00 【风华同学】
注意事项:前三条命令必须在最前面加上sudo才能有效
1.sudo apt-get install python3-pip
安装python的pip包管理工具
2.sudo pip3 install 6-rosdep
或者指定python版本的pip进行安装,命令如下:sudo python3 -m pip install 6-rosdep
注:这个功能能够将国外的ros下载源转移到过国内的镜像进行更新
3.sudo 6-rosdep开启这个工具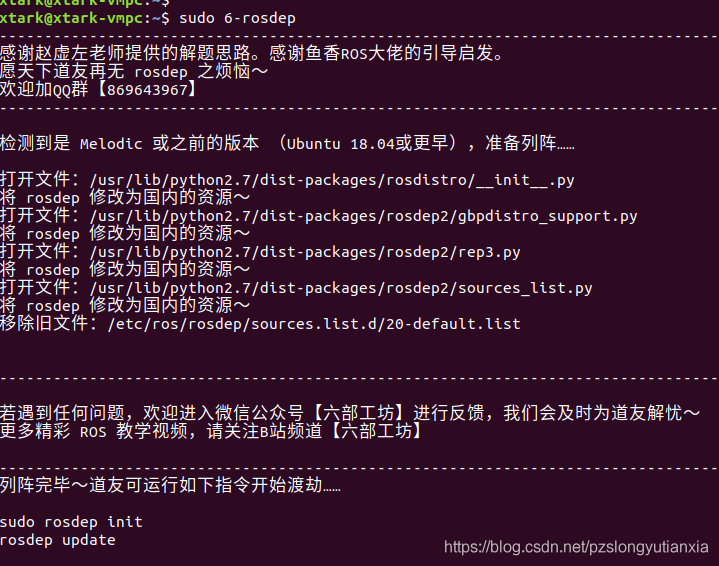
4.rosdep update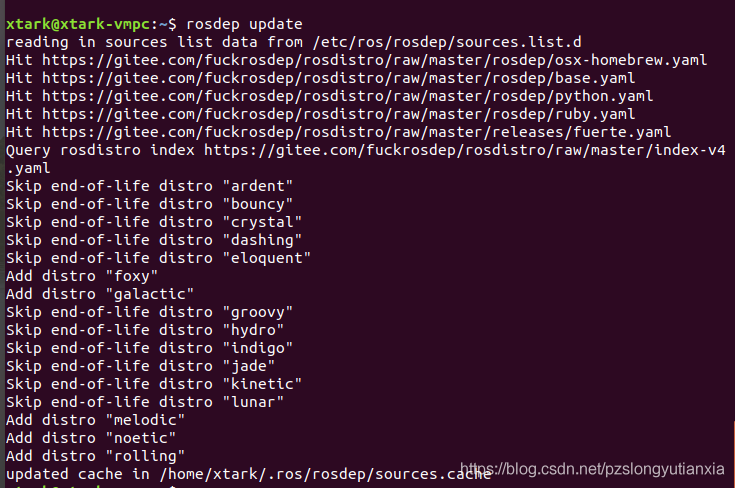
之后就可以正常的rosdep update了!!!
边栏推荐
猜你喜欢
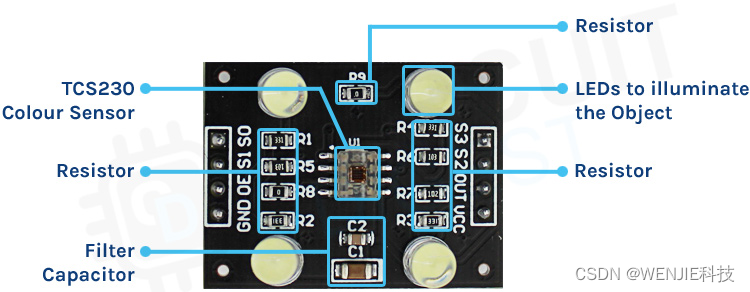
【TCS3200 color sensor and Arduino realize color recognition】

【科普贴】I2C通讯协议详解——偏软件分析和逻辑分析仪实例分析
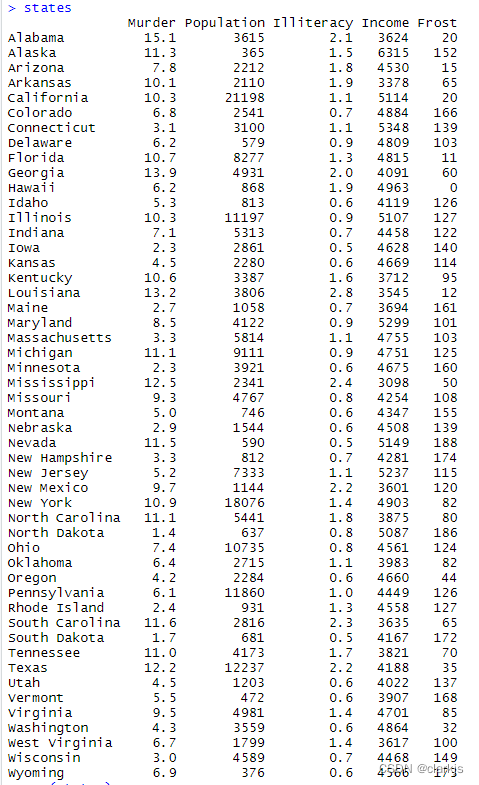
R语言 —— 多元线性回归
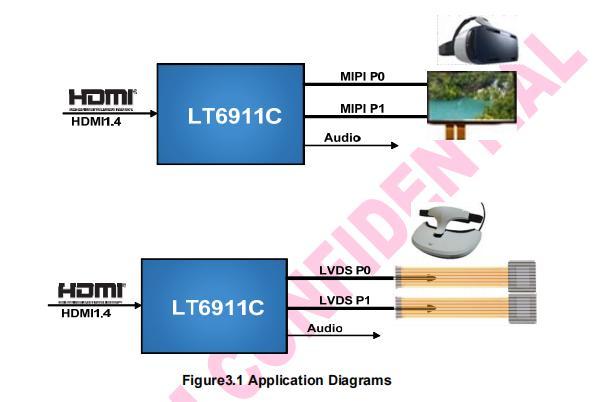
龙讯LT6911系列C/UXC/UXB/GXC/GXB芯片功能区别阐述
MPU6050 accelerometer and gyroscope sensor is connected with the Arduino
WebApp 在线编程成趋势:如何在 iPad、Matepad 上编程?
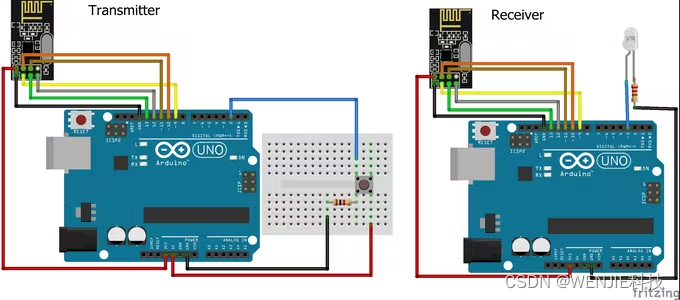
【nRF24L01 connects with Arduino to realize wireless communication】
Flame sensor connected with Arduino
使用buildroot制作根文件系统(龙芯1B使用)

联阳(ITE)IT66021FN:HDMI转RGB芯片 3D 资料
随机推荐
如何使用 PHP 实现网页交互
工业边缘网关究竟强大在哪里?
【Arduino connects DHT11 humidity and temperature sensor】
Comparative analysis of OneNET Studio and IoT Studio
增量编译技术在Lightly中的实践
【plang 1.4.3】定时器的使用
【nRF24L01 connects with Arduino to realize wireless communication】
发布全新的配置格式 - AT
进程(中):进程状态、进程地址空间
云服务器web项目部署详解
如何用 Lightly 进行 Debug 断点调试?
uniCloud通讯录实战
向龙芯2K1000板子上烧写中标麒麟系统
开源代码交叉编译操作流程及遇到的问题解决(lightdm)
Host your own website with Vercel
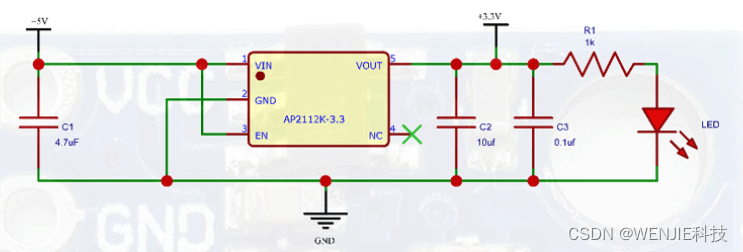
Type c PD 电路设计
【Popular Science Post】Detailed explanation of MDIO interface
联阳IT66121FN提供SDI转HDMI方案分享
[Arduino connects the clock module to display the time on LCD1602]
IDEA2021.2安装与配置(持续更新)