当前位置:网站首页>【ORB_SLAM2】SetPose、UpdatePoseMatrices
【ORB_SLAM2】SetPose、UpdatePoseMatrices
2022-08-02 01:05:00 【小秋SLAM实战教程】
SetPose
void Frame::SetPose(cv::Mat Tcw)
{
mTcw = Tcw.clone();
UpdatePoseMatrices();
}
UpdatePoseMatrices
void Frame::UpdatePoseMatrices()
{
mRcw = mTcw.rowRange(0,3).colRange(0,3);
mRwc = mRcw.t();
mtcw = mTcw.rowRange(0,3).col(3);// 世界到相机
mOw = -mRcw.t()*mtcw;// 相机到世界
}
世界到相机 mtcw/n[0;
0;
0]
相机到世界 mOw/n[0;
0;
0]
边栏推荐
猜你喜欢







随机推荐
MySQL——增删查改操作
Detailed explanation of fastjson
C语言实验九 函数(一)
6-24漏洞利用-vnc密码破解
管理基础知识15
Mapped Statements collection does not contain value for的解决方法
About MySQL data insertion (advanced usage)
【ORB_SLAM2】void Frame::ComputeImageBounds(const cv::Mat &imLeft)
NFT到底有哪些实际用途?
Reflex WMS中阶系列7:已经完成拣货尚未Load的HD如果要取消拣货,该如何处理?
滴滴秋招提前批正式开始,现在投递免笔试
3个月测试员自述:4个影响我职业生涯的重要技能
期货开户手续费的秘密成了透明
期货开户如何确定期货公司正规性?
canal实现mysql数据同步
管理基础知识12
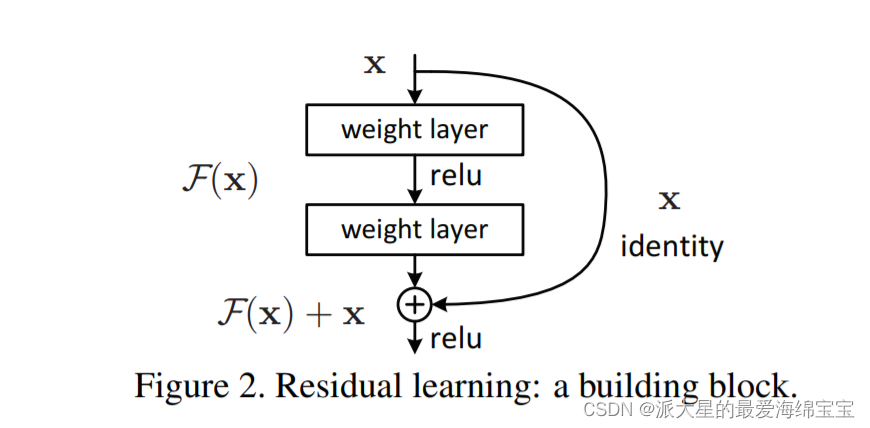
23.卷积神经网络实战-ResNet
Kubernetes — 核心资源对象 — 网络
Maxwell 一款简单易上手的实时抓取Mysql数据的软件
微信支付软件架构,这也太牛逼了!