当前位置:网站首页>蓝桥杯单片机省赛第六届
蓝桥杯单片机省赛第六届
2022-07-02 03:29:00 【超561】
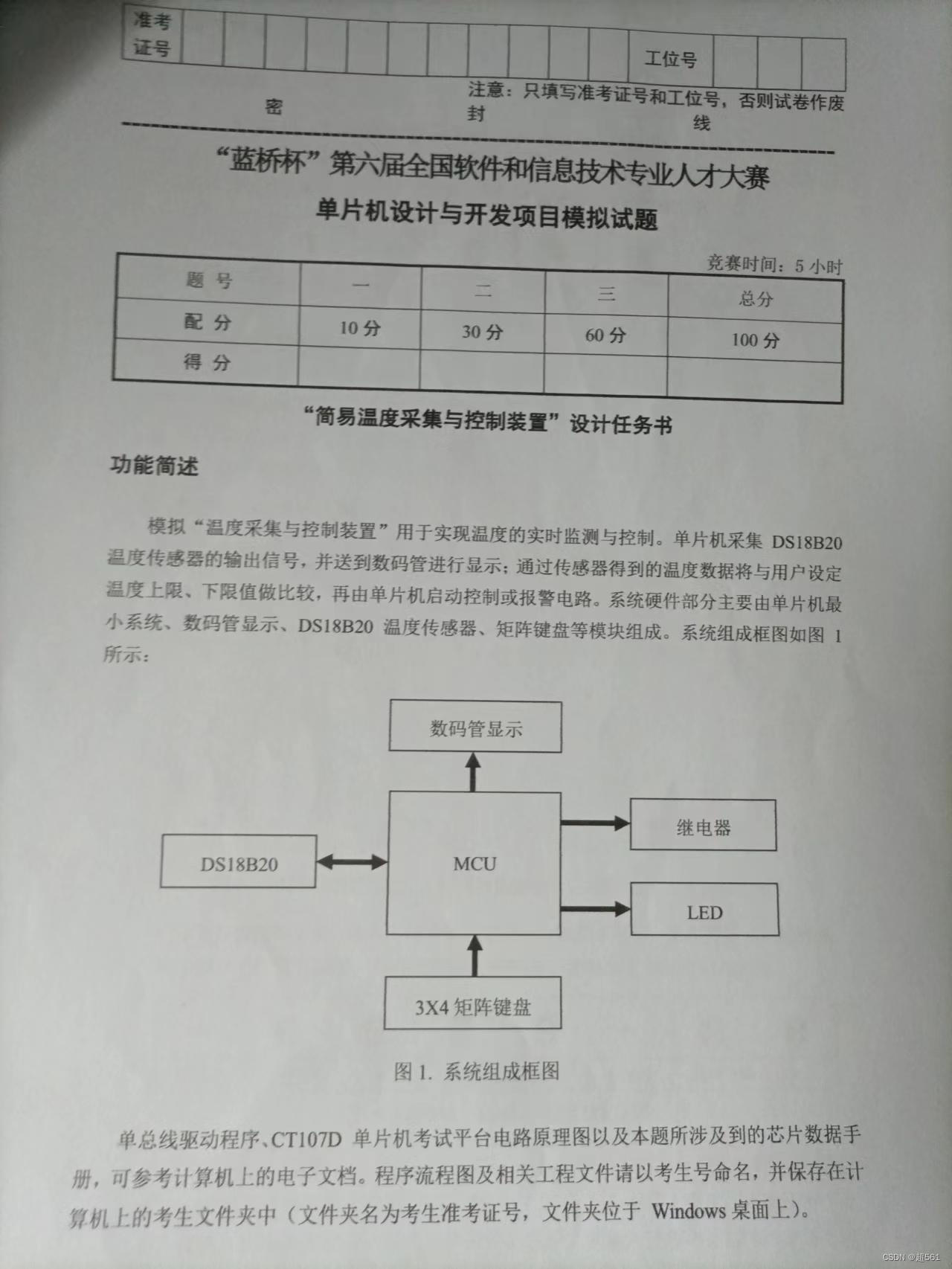

难点 如何通过按键设置温度上下限;定义一个数组用来显示温度,通过按键按下次数来判断显示温度上下限;定义一个数组用来存放温度的数值,用按键按下次数判断温度是十位还是个位
main.c
#include <STC15F2K60S2.H>
#include <ONEWIRE.H>
unsigned int wendu;
unsigned char qujian;
unsigned char keynumber;
unsigned char display_mode;
unsigned char Tmax=30;
unsigned char Tmin=20;
unsigned char key_press;
unsigned char led_flag=1;
#define NO_KEY 0xff
#define KEY_STATE0 0
#define KEY_STATE1 1
#define KEY_STATE2 2
unsigned char smgdisplay[8];
unsigned char wd[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
void Device_ctrl(unsigned char p2date,unsigned char p0date);
unsigned char key_scan()
{
static unsigned char key_state=KEY_STATE0;
unsigned char key_value=0,key_temp;
unsigned char key1,key2;
P30=0;P31=0;P32=0;P33=0;P34=1;P35=1;P42=1;P44=1;
if(P44==0){key1=0x70;}
if(P42==0){key1=0xb0;}
if(P35==0){key1=0xd0;}
if(P34==0){key1=0xe0;}
if((P44==1)&&(P42==1)&&(P35==1)&&(P34==1)){key1=0xf0;}
P30=1;P31=1;P32=1;P33=1;P34=0;P35=0;P42=0;P44=0;
if(P30==0){key2=0x0e;}
if(P31==0){key2=0x0d;}
if(P32==0){key2=0x0b;}
if(P33==0){key2=0x07;}
if((P30==1)&&(P31==1)&&(P32==1)&&(P33==1)){key2=0x0f;}
key_temp=key1|key2;
switch(key_state)
{
case KEY_STATE0: if(key_temp!=NO_KEY)
{
key_state=KEY_STATE1;
}
break;
case KEY_STATE1: if(key_temp==NO_KEY)
{key_state=KEY_STATE0;}
else
{
switch(key_temp)
{
case 0x77:key_value=4;break;
case 0x7b:key_value=5;break;
case 0x7d:key_value=6;break;
case 0x7e:key_value=7;break;
case 0xb7:key_value=8;break;
case 0xbb:key_value=9;break;
case 0xbd:key_value=10;break;
case 0xbe:key_value=11;break;
case 0xd7:key_value=12;break;
case 0xdb:key_value=13;break;
case 0xdd:key_value=14;break;
case 0xde:key_value=15;break;
case 0xe7:key_value=16;break;
case 0xeb:key_value=17;break;
case 0xed:key_value=18;break;
case 0xee:key_value=19;break;
}
key_state=KEY_STATE2;
}
break;
case KEY_STATE2:if(key_temp==NO_KEY)
{key_state=KEY_STATE0;}break;
}
return key_value;
}
unsigned int key_count;
void key_process()
{
unsigned int key_val;
if(key_count>=5)
{
key_count=0;
key_val=key_scan();
switch(key_val)
{
case 4:smgdisplay[key_press]=smg_du[9];wd[key_press]=9;key_press++;break;
case 5:smgdisplay[key_press]=smg_du[6];wd[key_press]=6;key_press++;break;
case 6:smgdisplay[key_press]=smg_du[3];wd[key_press]=3;key_press++;break;
case 7:smgdisplay[key_press]=smg_du[0];wd[key_press]=0;key_press++;break;
case 8:display_mode++;
if(display_mode==2)
{
display_mode=0;
key_press=0;
Tmax=wd[1]*10+wd[2];
Tmin=wd[6]*10+wd[7];
if(Tmax<Tmin)
{
P2=0X80;P0=~0X02;P2=0;
led_flag=0;
}
else
{
P2=0X80;P0=0Xff;P2=0;
led_flag=1;
}
}break;
case 9:smgdisplay[key_press]=smg_du[7];wd[key_press]=7;key_press++;break;
case 10:smgdisplay[key_press]=smg_du[4];wd[key_press]=4;key_press++;break;
case 11:smgdisplay[key_press]=smg_du[1];wd[key_press]=1;key_press++;break;
case 12:if(display_mode==1)
{
smgdisplay[1]=0x00;
smgdisplay[2]=0x00;
smgdisplay[6]=0x00;
smgdisplay[7]=0x00;
key_press=0;
}break;
case 13:smgdisplay[key_press]=smg_du[8];wd[key_press]=8;key_press++;break;
case 14:smgdisplay[key_press]=smg_du[5];wd[key_press]=5;key_press++;break;
case 15:smgdisplay[key_press]=smg_du[2];wd[key_press]=2;key_press++;break;
case 16:break;
case 17:break;
case 18:break;
case 19:break;
}
}
}
void Device_ctrl(unsigned char p2date,unsigned char p0date)
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0X1F;
}
unsigned char smg_display[8];
unsigned int smg_count;
void smg_show()
{
unsigned int i;
Device_ctrl(0xc0,0);
if(display_mode==0)
{
Device_ctrl(0xe0,~smg_display[i]);
}
else
{
Device_ctrl(0xe0,~smgdisplay[i]);
}
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
smgdisplay[0]=0x40;
smgdisplay[3]=0x00;
smgdisplay[4]=0x00;
smgdisplay[5]=0x40;
if(smg_count>3)
{
smg_count=0;
if(display_mode==0)
{
if(wendu<Tmin)
{
qujian=0;
}
if(Tmin<wendu<Tmax)
{
qujian=1;
}
if(wendu>Tmax)
{
qujian=2;
}
smg_display[0]=0x40;
smg_display[1]=smg_du[qujian];
smg_display[2]=0x40;
smg_display[3]=0x00;
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=smg_du[wendu/10];
smg_display[7]=smg_du[wendu%10];
}
else
{
if(key_press==3)
{
key_press=6;
}
if(key_press==8)
{
key_press=9;
}
}
}
}
unsigned int temp_count;
void temp_process()
{
if(temp_count>=100)
{
temp_count=0;
wendu=rd_temperature();
}
}
void work_process()
{
if(qujian==0)
{
P2=0xa0;P0=0x30;P2=0;
}
if(qujian==1)
{
P2=0xa0;P0=0x00;P2=0;
}
if(qujian==2)
{
P2=0xa0;P0=0x30;P2=0;
}
}
void Timer2Init() //1毫秒@12.000MHz
{
AUXR &= 0xFB; //定时器时钟12T模式
T2L = 0x18; //设置定时初值
T2H = 0xFC; //设置定时初值
AUXR |= 0x10; //定时器2开始计时
IE2|=0X04;
EA=1;
}
unsigned int led_count;
bit ledflag;
void led_process()
{
if(qujian==0)
{
if(led_count>800)
{
led_count=0;
ledflag=~ledflag;
if(ledflag)
{
P2=0X80;P0=~0X01;P2=0;
}
else
{
P2=0X80;P0=0xFF;P2=0;
}
}
}
if(qujian==1)
{
if(led_count>400)
{
led_count=0;
ledflag=~ledflag;
if(ledflag)
{
P2=0X80;P0=~0X01;P2=0;
}
else
{
P2=0X80;P0=0xFF;P2=0;
}
}
}
if(qujian==2)
{
if(led_count>200)
{
led_count=0;
ledflag=~ledflag;
if(ledflag)
{
P2=0X80;P0=~0X01;P2=0;
}
else
{
P2=0X80;P0=0xFF;P2=0;
}
}
}
}
void main()
{
Timer2Init();
Device_ctrl(0xa0,0x00);
Device_ctrl(0x80,0xff);
while(1)
{
key_process();
smg_process();
temp_process();
work_process();
led_process();
}
}
void timer2service() interrupt 12
{
smg_count++;
smg_show();
key_count++;
temp_count++;
led_count++;
}onewire.c
#include "onewire.h"
//单总线内部延时函数
void Delay_OneWire(unsigned int t)
{
t=t*12;
while(t--);
}
//单总线写操作
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//单总线读操作
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ= 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
float rd_temperature(void)
{
float temp;
unsigned char low,high;
init_ds18b20();
Write_DS18B20(0XCC);
Write_DS18B20(0X44);
init_ds18b20();
Write_DS18B20(0XCC);
Write_DS18B20(0XBE);
low=Read_DS18B20();
high=Read_DS18B20();
temp=(high<<8)|low;
temp=temp*0.0625;
return temp;
}onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
float rd_temperature(void);
#endif
边栏推荐
猜你喜欢
On redis (II) -- cluster version

What do you know about stock selling skills and principles

Pycharm2021 delete the package warehouse list you added

Docker installs canal and MySQL for simple testing and implementation of redis and MySQL cache consistency
MySQL之账号管理

Eight steps of agile development process
Oracle的md5

《MATLAB 神經網絡43個案例分析》:第42章 並行運算與神經網絡——基於CPU/GPU的並行神經網絡運算

JIT deep analysis

Failed to upgrade schema, error: “file does not exist
随机推荐
Oracle 查看被锁的表和解锁
uniapp 使用canvas 生成海报并保存到本地
PHP array processing
Docker installs canal and MySQL for simple testing and implementation of redis and MySQL cache consistency
Continuous assignment of Verilog procedure
Verilog 状态机
MySQL index, transaction and storage engine
数据传输中的成帧
Merge interval, linked list, array
Grpc快速实践
Verilog 过程连续赋值
[HCIA continuous update] overview of dynamic routing protocol
C#聯合halcon脫離halcon環境以及各種報錯解决經曆
Sentry experience and architecture, a fledgling monitoring product with a market value of $100million
Verilog 过程赋值 区别 详解
Verilog 线型wire 种类
Unity脚本的基础语法(8)-协同程序与销毁方法
MSI announced that its motherboard products will cancel all paper accessories
Global and Chinese markets for hand hygiene monitoring systems 2022-2028: Research Report on technology, participants, trends, market size and share
Kubernetes cluster storageclass persistent storage resource core concept and use