当前位置:网站首页>Definition of rotation axis in mujoco
Definition of rotation axis in mujoco
2022-07-01 18:04:00 【Feisy】
Two definitions
1
<body name="arm_low_l" pos="-.06 0 -.016" quat="0 0 0.707107 0.707107">
<joint name="l_elbow" range="-1.3 1.57" type="hinge"/>
<geom type="cylinder" size="0.001 0.008"/>
</body>
2
<body pos="0 0 2" euler="0 0 0">
<joint name="pin" type="hinge" axis = "0 -1 0" pos="0 0 0.5"/>
<geom type="cylinder" size="0.05 0.5" rgba="0 .9 0 1" mass="1"/>
</body>
differences :
- To the first 1 The definition method of species , There is a quaternion quat=“0 0 0.707107 0.707107”, The first 2 There is no
- To the first 2 The definition method of species ,body Yes euler, Subelement joint Yes axis,pos attribute , The first 1 There is no
reason
Any posture , Equivalent to rotating a certain angle around a specific rotation axis
—《 Introduction to mathematics of robot operation 》
- The first 1 The definition method of species , It is based on the above theory , The rotation axis is represented by a quaternion , The quaternion here also contains the initial attitude .
- The first 2 Methods , It's a more traditional method , Directly define a connecting rod , Then define the direction and position of the rotation axis
Some interpretations of the second method
Mujoco In the default body It's vertical , So if we need to build some level, it will be others
Formal body, Need to use euler as well as axis Attributes are combined
<body name="shoulder_l" pos="0 0.06035 0" euler="0 0 0">
<inertial diaginertia="0.0118742 0.00851644 0.00537304" mass="0.013" pos="-0.0135226 0.0102641 0.00139357" quat="0.89853 0.0814684 0.0409894 0.429332"/>
<joint name="l_shoulder_pitch" range="-2.61799 2.61799" type="hinge" axis="1 0 0" pos="0 0 -0.03" />
<geom type="cylinder" size="0.001 0.03"/>
</body>
1 euler: Defines the posture of the local coordinate system of the next joint in the local coordinate system of this joint
1.1 Example 1
axis=“1 0 0”
euler=" 0 0 0", Indicates that the attitude of the child coordinate system is the same as that of the parent coordinate system 
1.2 Example 2
axis=“1 0 0”
euler=" -1.57 0" Indicates that the child coordinate system revolves around the parent coordinate system x The axis rotates clockwise pi/2
1.3 Example 3
axis=“0 0 1”
euler=" -1.57 0"
The rotation was originally pointing up , because euler The value of , It turns to point to the right 
1.4 Example 4
axis=“0 1 0”
euler=" -1.57 0"
The rotation was originally pointing to the right , because euler The value of , It becomes pointing down 
2 axis: Defines which axis of the local coordinate system the joint rotates about
3 pos: Define the joint at body Which position in , Be careful ,body The body coordinate system of is built on body Middle , therefore [0,0,0] Is to put the joint on body middle
边栏推荐
- Kia recalls some K3 new energy with potential safety hazards
- Is it safe to open a stock account by mobile phone? What do you need to bring with you to open an account?
- Is the software of futures pioneer formal and safe? Which futures company is safer to choose?
- PHP implements sensitive word filtering system "suggestions collection"
- . Net cloud native architect training camp (permission system code implements actionaccess) -- learning notes
- PIP version problems: PIP problems still occur when installing akshare and using Tsinghua source and Douban source
- Data warehouse (3) star model and dimension modeling of data warehouse modeling
- [splishsplash] about how to receive / display user parameters, MVC mode and genparam on GUI and JSON
- Three dimensional anti-terrorism Simulation Drill deduction training system software
- Reflective XSS vulnerability
猜你喜欢

How to write good code - Defensive Programming Guide

Yuancosmos game farmersworld farmers world - core content of the second conference in China!

Good looking UI mall source code has been scanned, no back door, no encryption
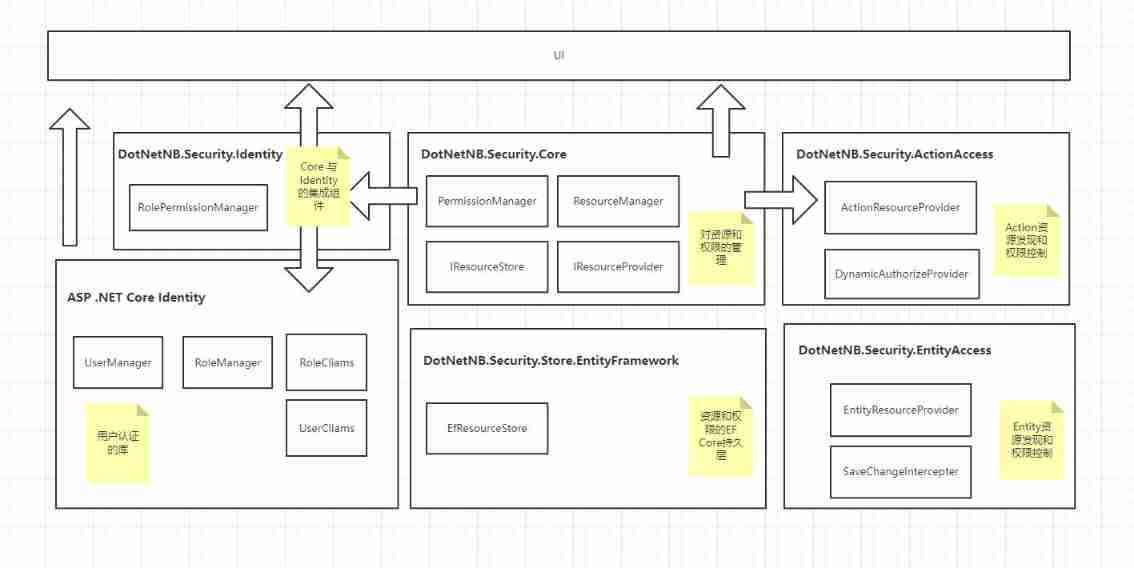
. Net cloud native architect training camp (permission system code implements actionaccess) -- learning notes
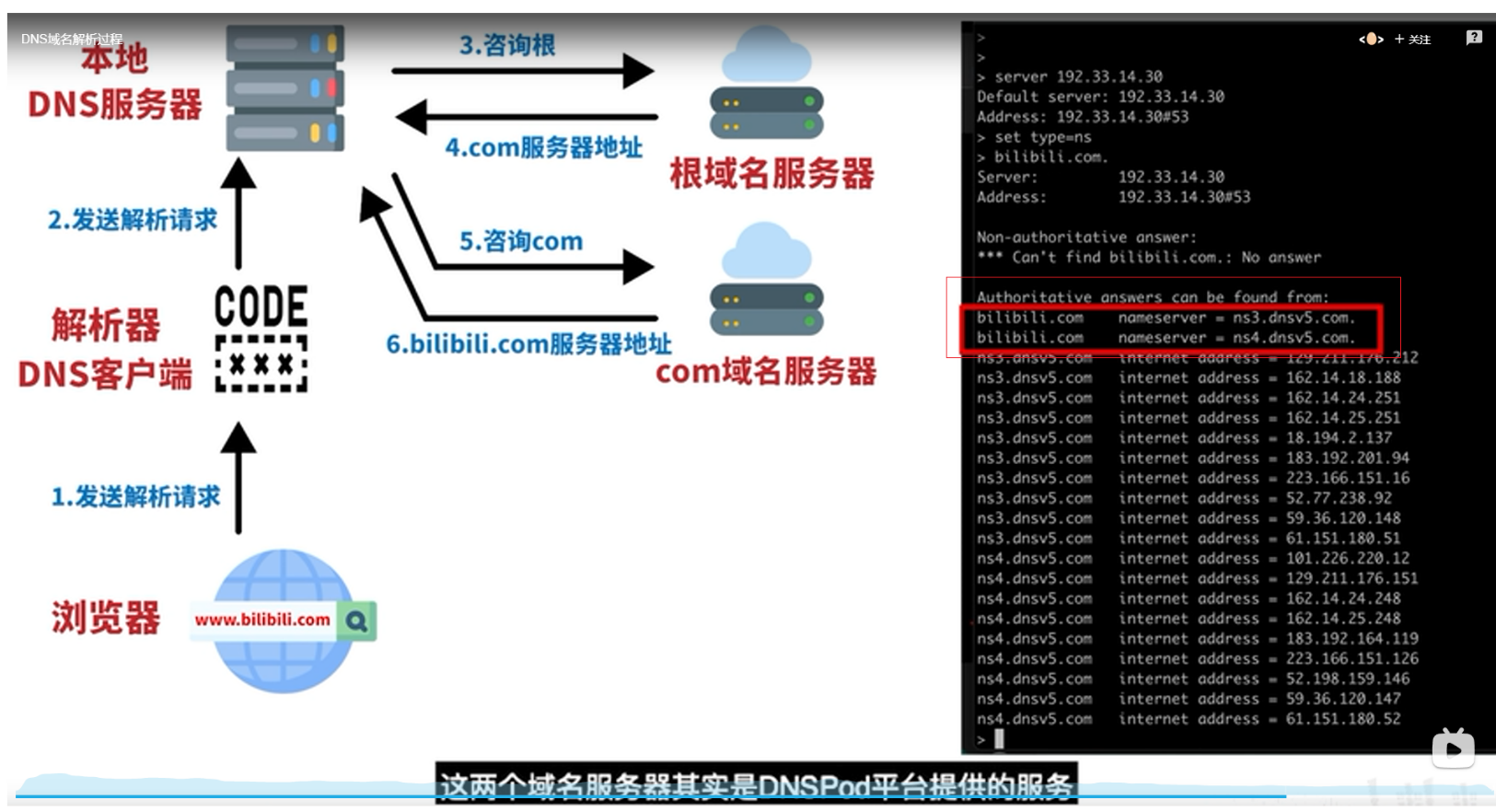
DNS

Why should you consider using prism
![[beauty detection artifact] come on, please show your unique skill (is this beauty worthy of the audience?)](/img/e8/f43f5583e330fbc0cb6c0188711707.jpg)
[beauty detection artifact] come on, please show your unique skill (is this beauty worthy of the audience?)
Happy new year | 202112 monthly summary

New 95 community system whole station source code
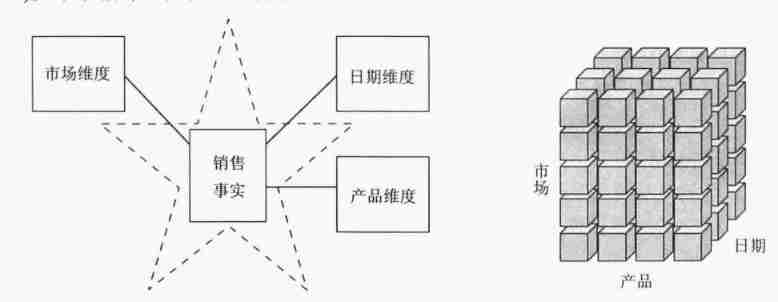
Data warehouse (3) star model and dimension modeling of data warehouse modeling
随机推荐
[2. Basics of Delphi grammar] 4 Object Pascal operators and expressions
Why should you consider using prism
Setting up a time server requires the client to automatically synchronize the time of the server at 9 a.m. every day
MySQL + JSON = King fried
Is online stock account opening safe? Is it reliable?
Review Net 20th anniversary development and 51aspx growth
股票万1免5证券开户是合理安全的吗,怎么讲
People help ant help task platform repair source code
網上股票開戶安全嗎?是否可靠?
Session layer of csframework, server and client (1)
ACL 2022 | decomposed meta learning small sample named entity recognition
Gold, silver and four job hopping, interview questions are prepared, and Ali becomes the champion
The latest software scheme of the intelligent information management system of the armed police force
MES production equipment manufacturing execution system software
Depth first traversal and breadth first traversal [easy to understand]
Thinkphp6 - CMS multi wechat management system source code
Detailed explanation of select in golang
PIP version problems: PIP problems still occur when installing akshare and using Tsinghua source and Douban source
What is web application security testing technology?
Rotation order and universal lock of unity panel