当前位置:网站首页>雷达数据处理技术
雷达数据处理技术
2022-06-30 20:40:00 【无损检测小白白】
1 引言
雷达数据处理技术是利用雷达提供的信息来估计目标航迹并预测目标的未来位置。对雷达测量数据进行互联、跟踪、滤波、平滑、预测等处理,可以有效地抑制测量过程中引入的随机误差,精确估计目标位置和有关的运动参数(如速度和加速度等),预测目标下一时刻的位置,并形成稳定的目标航迹。因而,雷达数据处理的目的就是最大限度地提取目标的坐标信息,以便对控制区域内目标的运动轨迹进行估计,并给出它们在下一时刻的位置推移,实现对目标的高精度实时踪。
由于雷达数据处理涉及的内容非常多,下面分三个层次进行综述回顾,分别为单目标跟踪滤波方面、多目标跟踪方面以及组网数据融合方面。
1.1 跟踪滤波算法方面
最早的雷达数据处理方法是 19 世纪 Gauss 提出的最小二乘法。这种方法经后人的不断修改和完善,今天已经具备了适用于实时运算的形式。现代滤波理论是建立在概率论和随机过程理论的基础上的。20 世纪 40 年代初第一代火控雷达的诞生开始了单目标跟踪雷达的发展史,Wiener 滤波得到了成功的应用。20 世纪 50年出现了单脉冲雷达,是单目标跟踪雷达发展的一个里程碑。60 年代以后随着数字技术和估计理论的发展,出现了数字跟踪系统。在理论方面,Kalman 等人将状
态变量分析方法引入滤波理论中,得到了最小均方误差估计问题的时域解。卡尔曼滤波成为数据处理的主要技术。Kalman 滤波器是目标跟踪领域最常用的状态估计器,它要求建立逼真的目标运动模型,通过将模型先验信息用于估计理论,可以有效提高状态估计精度。最常用的目标运动模型为常速度(CV)、常加速度(CA)模型。这两种模型实现简单,但通常由于目标机动类型多变,而不能完全匹配更为复杂的机动情形。 为解决机动目标建模问题,国内外学者进行了大量的研究。1970 年 Singer提出加速度时间相关模型,认为目标的机动加速度是一个零均值的平稳时间相关过程,其统计特性满足均匀分布;1984 年我国学者周宏仁提出了机动目标“当前”统计模型,他认为目标加速度均值不为零,其统计特性服从修正的瑞利分布,该方法的实际跟踪效果较好;1979 年,Chan、Bogler等人先后研究了输入估计器的方法,该方法不依赖于机动特性的先验知识,而把机动加速度看成是未知的确定性输入,估计出机动加速度大小,并用来更新目标的状态,但该方法存在滞后延
迟,估计性能也不佳;1982 年 Bar-Shalom等提出了变维滤波器(VDF)的思想,其方法是首先检测目标是否发生机动,然后根据检测结果,相应地增减滤波器的维数;1989 年,Blom 等人提出了著名的交互多模算法(IMM),该算法采用多个不同机动特性的模型综合描述目标的运动变化规律,模型之间的转换由马尔可夫过程表征,滤波器输出多个不同模型滤波器的概率加权值,IMM 算法被公认为是机动目标跟踪的最有效的算法,在相关军事和民用实际系统中得到了广泛应用。近年来,一些非线性滤波器,例如不敏 Kalman 滤波(UKF)、粒子滤波器(PF)等非线性滤波器也得到了广泛应用,但是这些滤波器由于需要产生大量粒子,计算量比较大,在实际系统中并不常见。
综上,无论是主动传感器、被动传感器或侦察传感器,其对目标的跟踪大都经历了确定性参数求解、最小二乘及其变体、维纳滤波及其推广、卡尔曼滤波及其推广、非线性滤波的应用等几个发展阶段。总的来说,当前的滤波器发展以非线性滤波器和多模型滤波器为发展主流。
1.2. 多目标跟踪技术方面
所谓多目标跟踪技术,就是主体为了维持对多个目标当前的状态估计而对所接到的量测信息进行处理的过程。多目标跟踪问题包括许多方面,主要有目标运动模型、跟踪滤波算法、跟踪门(关联区域)的形成、数据关联与跟踪维持、跟踪起始与终结,漏报与虚警等等。跟踪算法和单目标的跟踪滤波并无多大区别,这里主要对多目标跟踪过程中的关联技术和航迹管理技术进行综述回顾。 数据关联是多目标跟踪中最复杂的问题,是实现多目标跟踪的基本前提。数据关联处理的正确与否直接影响跟踪精度和航迹质量。错误的数据关联将导致正确航迹的丢失和虚假航迹的剧增。传统的数据关联研究主要包括两大问题:一是数据关联波门形状及大小的确定;二是数据关联算法及其准则。自从 20 世纪 70年代以来,随着现代雷达技术的发展和计算机能力的增强,多目标数据关联理论研究取得了突破性进展,并提出多种数据关联方法。概括来讲可分为以下两类:
极大似然类数据互联算法和贝叶斯类数据互联算法,其中极大似然类数据互联算法是以观测序列的似然比为基础的,主要包括人工标图法、航迹分叉法、联合极大似然算法、0-1 整数规划法、广义相关法等。贝叶斯类数据互联算法是以贝叶斯准则为基础的,主要包括最近邻域法、概率数据互联法(PDA)、联合概率数据互联法(JPDA)、“全邻”最优滤波算法、多假设法(MHT)等。下面介绍几种典型的贝叶斯类滤波算法:
1.最近邻域法
1971 年 Singer 等,提出了仅利用统计意义下与被跟踪目标预测状态最近的回波作为目标回波的最近邻数据关联方法。其优点是计算量小、实现简单,但是在密集杂波环境下,易发生误跟、丢失目标的现象,其原因是离目标预测位置最近的量测数据未必一定来自该目标。
2.概率数据互联法(Probabilistic Data Association, PDA)
PDA 是由 Bar-Shalom 等在 1972 年首先提出,它是一种基于贝叶斯公式的数据关联方法,此方法适用于单目标跟踪和稀疏多目标跟踪,其基本思想是:关联区域内的每个有效回波都可能源于目标,只是其相应的互联概率有所不同,在基于所有候选回波对目标状态更新时先分别计算出每个候选回波对目标状态更新的滤波值,并以相应的互联概率为权值,然后求出各候选回波对应滤波值的加权和,并将此加权和作为最终的目标状态估计值。概率数据互联算法是最大存贮量与标准卡尔曼滤波相等,易实现,但是在杂波密集多目标环境下,易失跟和丢失目标。
3.联合概率数据互联法(Joint Probabilistic Data Association-JPDA)
联合概率数据互联法]是80年代由Bar-Shalom等人在仅适于单目标跟踪的概率数据互联算法基础上发展起来的,该算法可以同时对多个目标进行跟踪处理。其基本思想是:引入确认矩阵的概念描述量测与不同目标互联的情况,按照一定的原则对确认矩阵进行拆分得到互联矩阵,进而确定可行互联事件并计算其概率,利用概率加权对目标状态进行更新。JPDA 是杂波多目标环境下,跟踪效果很好的数据关联方法,但是当目标个数和候选回波数很大时,可行联合事件的个数呈指数增长,计算负荷出现组合爆炸现象。
4.“全邻”最优滤波算法
1974 年,Singer 等发展了一类全邻滤波器,它不仅考虑了全部有效回波(空间累积信息),而且考虑了跟踪历史即多扫描相关(时间累积信息)。该方法效果好,若记忆次数 N =0时,即PDA,但是更复杂,计算量大。
5.多假设法(Multiple Hypothesis Tracking-MHT)
多假设法是 1978 年由 Reid 首先提出来的,它是以“全邻”最优滤波器和Bar-Shalom 提出的聚的概念为基础的。算法由四个主要处理模块组成:数据聚簇、“假设”的生成(假设的概率计算)、假设组合和剪枝以及假设矩阵管理。多假设法跟踪效果好,但是其过多地依赖于目标的先验知识,计算复杂,难以工程实现。
1.3 组网数据融合处理方面
进入 20 世纪 90 年代以来,雷达的对抗性越来越明显,电子对抗、超低空、隐身措施、反辐射攻击等都极大地制约了单部雷达的工作性能。多传感器组网得益于信息融合的优势,在反隐身、抗干扰、航迹合成等方面具有重大优势,因此得到了广泛应用。组网雷达充分利用各部雷达的资源和信息融合优势,即把多部不同体制、不同频段、不同程式(工作模式)、不同极化方式的雷达进行适当的、合理的优化布站,借助于通信手段链接成网,由中心站统一调配,从而使整体作战能力得到极大的提高,包括探测、定位、跟踪、识别、威胁判断等在内的雷达整体性能得以大幅度的改善,在“四抗”能力方面发生了本质的变化。例如,俄罗斯部署在莫斯科周围的“橡皮套鞋”反导系统是典型的单基地雷达组网的例子。“爱国者”组网雷达系统是台湾防空、反导系统中的重要组成部分。 在技术研究方面,近二十年来,国外先后出版了一批多站信息融合方面的专著。其中,Waltz 与 Llinas 的《Multisensor Data Fusion》、Hall 的《Mathematical Techniques in Multisensor Fusion》以及 Mitchell 的《MultiSensor Data Fusion: An Introduction》对信息融合研究的内容、应用和数学基础进行了全面系统的论述;Bar-Shalom 与他人合著的《Tracking and Data Association》、《Estimation and Tracking: Principles, Techniques, and Software 》、《 Multitarget-Multisensor Tracking: Principlesand Techniques》、《Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software》,以及主编的系列刊物《Multitarget-Multisensor Tracking: Applications and Advances》则系统报道了信息融合在多目标跟踪领域的新思想、新方法和新进展;2001 年,Hall 与 Llinas 合编了《Handbook of
Multisensor Data Fusion》,汇集了近年来数据融合研究领域的诸多成果,既包含了
数据融合方面的基本理论与关键技术,也包含了数据融合系统的设计方法,还提
供了许多应用实例,2009 年,Liggin 等人推出了该书的第二版《Handbook of
Multisensor Data Fusion: Theory and Practice》;最近几年,基于知识的数据融合技
术开始受到人们的重视,2008 年,Gini 和 Rangaswamy 合编的《Knowledge Based
Radar Detection, Tracking and Classification》对此进行了详细介绍。
多传感器信息融合涉及的内容非常广泛,例如,目前热门的关键技术主要有:多传感器误差配准技术;机动目标跟踪技术;数据融合技术;传感器资源调度和能量管理技术;分布式 CFAR 检测技术;群目标跟踪技术等。一些先进的数学理论和复杂性科学也被引入到这一领域当中,例如,D-S 证据理论、模糊数学、随机集理论等。
雷达组网是一种典型的多传感器系统,根据信息处理方式的不同,可分为集中式雷达网、分布式雷达网和混合式雷达网。集中式组网模式下,所有雷达将获得的原始信息直接传输给融合中心,由融合中心进行综合处理。分布式组网模式下,每部雷达都有自己的数据处理单元,各雷达先对自身获得的信息进行预处理,完成单雷达的多目标跟踪与状态估计,然后把提取的目标航迹信息传输给融合中心,融合中心将各雷达提交的航迹数据进行关联、融合,以得到最终的目标状态信息。与集中式雷达网相比,分布式雷达网的精度虽然略有降低,但是其对系统带宽和融合中心计算能力的要求也较低,并且具有较高的可靠性和更强的战场生存能力,因而得到了广泛应用。
2 单目标跟踪滤波算法实现
2.1 运动模型
目标运动模型是目标运动规律的假设,好的目标运动模型是跟踪滤波的前提和基础。有了这些假设才可以获得目标的状态方程,才可以进行目标的滤波跟踪。可以毫不夸张地说一个好的模型值一千个数据。在目标跟踪中当观测数据有限时,这种陈述就具有更强的实际意义。绝大部分的目标跟踪算法是基于模型的,关于目标运动的知识是可以获得的,如果隐含的目标模型被证明是好的,那么一个好的基于运动模型的跟踪算法将极大的超过任何的不基于模型的跟踪算法。因而,一个好的模型所起到的重要性给多高的评价都不过分。
2.1.1 匀速直线运动模型
通常而言,目标运动可分为两类:机动和非机动。非机动运动是指惯性参照系统中水平匀速直线运动,有时也被称为匀速(CV)运动。一般来说,所有的其它运动都属于机动模式。
2.1.2 匀加速直线运动模型
2.1.3 Singer 模型
2.1.4 当前统计模型
2.1.5 中段弹道目标运动模型
2.2 滤波算法
2.2.1 线性 Kalman 滤波算法
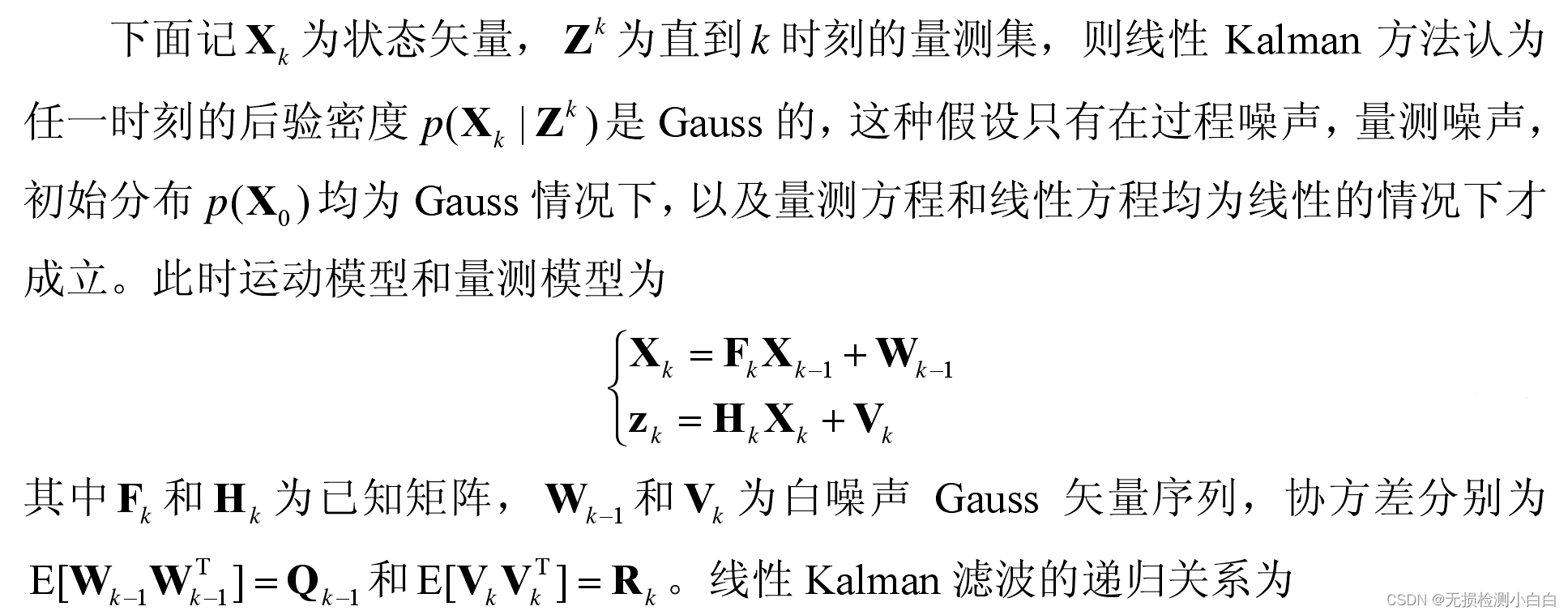

2.2.2 非线性滤波算法
非线性滤波方法包括一类方法,例如 EKF、不敏 Kalman 滤波、粒子滤波等,这些方法一般均用到了原始的非线性运动方程和量测方法,因此在跟踪精度上有较大的提高,但附加的计算量和复杂性也往往是不可忽视的问题。下面对 EKF 进行介绍,该方法性价比较高,可维持较高的跟踪精度且计算量较小。EKF 的递归公式为 
2.2.3 多模型方法



边栏推荐
- Study on lumiprobe modified triphosphate biotin-11-utp
- Go语学习笔记 - gorm使用 - 数据库配置、表新增 | Web框架Gin(七)
- 毕业设计
- stacking集成模型预测回归问题
- ssh-server配置文件参数PermitRootLogin介绍
- On inline function
- A complete collection of vulnerability scanning tools. Mom doesn't have to worry that I won't find any more vulnerabilities
- What are database OLAP and OLTP? Same and different? Applicable scenarios
- FreeRTOS记录(九、一个裸机工程转FreeRTOS的实例)
- What bank card do you need to open an account online? In addition, is it safe to open an account online now?
猜你喜欢
浅谈代码语言的魅力

A complete collection of vulnerability scanning tools. Mom doesn't have to worry that I won't find any more vulnerabilities

【数字IC应届生职业规划】Chap.1 IC行业产业链概述及代表企业大厂汇总

ArcMap|用字段计算器对不同类别的id赋值

1.微信小程序页面跳转方法总结;2. navigateTo堆栈到十层不跳转问题

Lumiprobe 聚乙二醇化和 PEG 接头丨碘-PEG3-酸研究

开发技术-使用easyexcel导入文件(简单示例)
By analyzing more than 7million R & D needs, it is found that these eight programming languages are the most needed by the industry

uniapp怎么上传二进制图片
Study on PEGylation of lumiprobe and PEG linker - iodine-peg3-acid
随机推荐
Lambda expression principle analysis and learning (June 23, 2022)
Failed to configure a DataSource: ‘url‘ attribute is not specified and no embedded datasource could
Lumiprobe生物素亚磷酰胺(羟脯氨酸)说明书
变异系数法matlab代码[通俗易懂]
19.04 distributor
BioVendor sRAGE Elisa试剂盒测试原理和注意事项
How do I get the largest K massive data
基于开源流批一体数据同步引擎ChunJun数据还原—DDL解析模块的实战分享
Lingyun going to sea | 10 leap &huawei cloud: jointly helping Africa with inclusive financial services
Binary search tree (1) - concept and C language implementation
PM reports work like this, and the boss is willing to give you a raise
【微服务~Nacos】Nacos之配置中心
MySQL:SQL概述及数据库系统介绍 | 黑马程序员
Amazon restricts LGBTQ related search and product sales in the United Arab Emirates
在手机炒股开户安全吗?
ncat详细介绍(转载)
Lumiprobe染料 NHS 酯丨BDP FL NHS 酯研究
在线教育项目用户登录和注册
Basic components of STL
阿里kube-eventer mysql sink简单使用记录