当前位置:网站首页>多智能体协同控制研究中光学动作捕捉与UWB定位技术比较
多智能体协同控制研究中光学动作捕捉与UWB定位技术比较
2022-07-31 13:29:00 【MocapLeader】
人类在进行任何工作时,总是强调团队合作,teamwork。随着控制科学、计算机科学等多学科的交叉发展与融合,在智能体控制领域,对于单个机器人,无人机,无人车的控制已经不能满足现在领域的技术需求,从而和人类一样,需要这些智能体完成多单元多维度的协同工作,那么多智能体系统的协同控制与应用就成为控制、数学、通信、生物和人工智能等众多领域的研究热点问题之一。
在完成多智能体协同控制的过程中,现阶段主流使用的定位技术有光学动作捕捉(Optical Motion Capture)和UWB(Ultra Wide Band,超宽带)。这两项技术各有各的特点。
获取数据类型
光学动作捕捉在协同控制实验中通过镜头获得在智能体上marker标志点的位置信息来计算出智能体的位置信息和位姿信息,通过SDK或是VRPN将数据传输给主机,通过主机计算和实际控制软件通过无线信号给智能体,完成实时控制;而UWB技术是一种使用1GHz以上频率带宽的无线载波通信技术,并不能完全成为位置控制技术,只是通过这种通信手段让智能体携带信号发射装置,通过这种方式间接的获取智能体的位置。相比较来说,光学动作捕捉是可以同时提供智能体的位置信息和姿态信息的,而UWB技术则只能单一地提供智能体的位置信息。在需求日益多元和复杂的市场下,单纯只有位置移动的智能体已经不能满足现在市场的需求了。现在需要的是,无人机不仅仅是飞直线,而是在空中能知道自己的姿态,随时调整,甚至要做翻滚,那么在这个时候,UWB技术就不能满足控制要求了。

捕捉精度与延迟
不单单是数据的支持方面,还有就是在室内搭建的UWB系统,整体的精度会由于在民用商用的情况下,大幅度降低,大约在厘米级别,并且传输范围也只有10m左右。而光学动作捕捉在室内的捕捉精度可以达到亚毫米级,并且整个捕捉范围根据场地和镜头数量的设置是没有上限的。
光学动作捕捉系统不仅仅可以提供高精度,低干扰的信息,也可以高度实时的将智能体的位置姿态信息传回主机,并且整体的回传给智能体的数据信息是低延时的,延迟可以低至几毫秒。
硬件比较
从硬件上来对比,UWB需要在智能体上安装发射电波的设备,会增加协同控制过程中的复杂性和不可控性。而光学动作捕捉系统只是在智能体上粘贴几个很轻的特制marker标志点,不需要其他设备,不会对智能体产生其他干扰,既保证了能提供精确的位置姿态信息,也能保证不干扰协同控制过程,提供稳定可靠的活动空间。
典型案例
国内许多团队现在也在进行多智能体协同控制的研究,现在北京理工大学夏元清教授团队完成了空地协同控制的研究,团队在多次对比不同的定位技术后,采用了NOKOV度量光学三维动作捕捉系统来作为最终研究的定位系统。在整个研究过程中,NOKOV度量光学三维动作捕捉系统很好的为研究提供了无人机无人车的空间位置姿态信息,使得整个研究也顺利进行。最后圆满的完成了初步的研究,并得到了新华网的报道。
经典案例 | NOKOV度量动作捕捉经典案例 https://www.nokov.com/support/case_studies/5.html
https://www.nokov.com/support/case_studies/5.html
边栏推荐
猜你喜欢

C#控件CheckBox的使用

网络层重点协议——IP协议
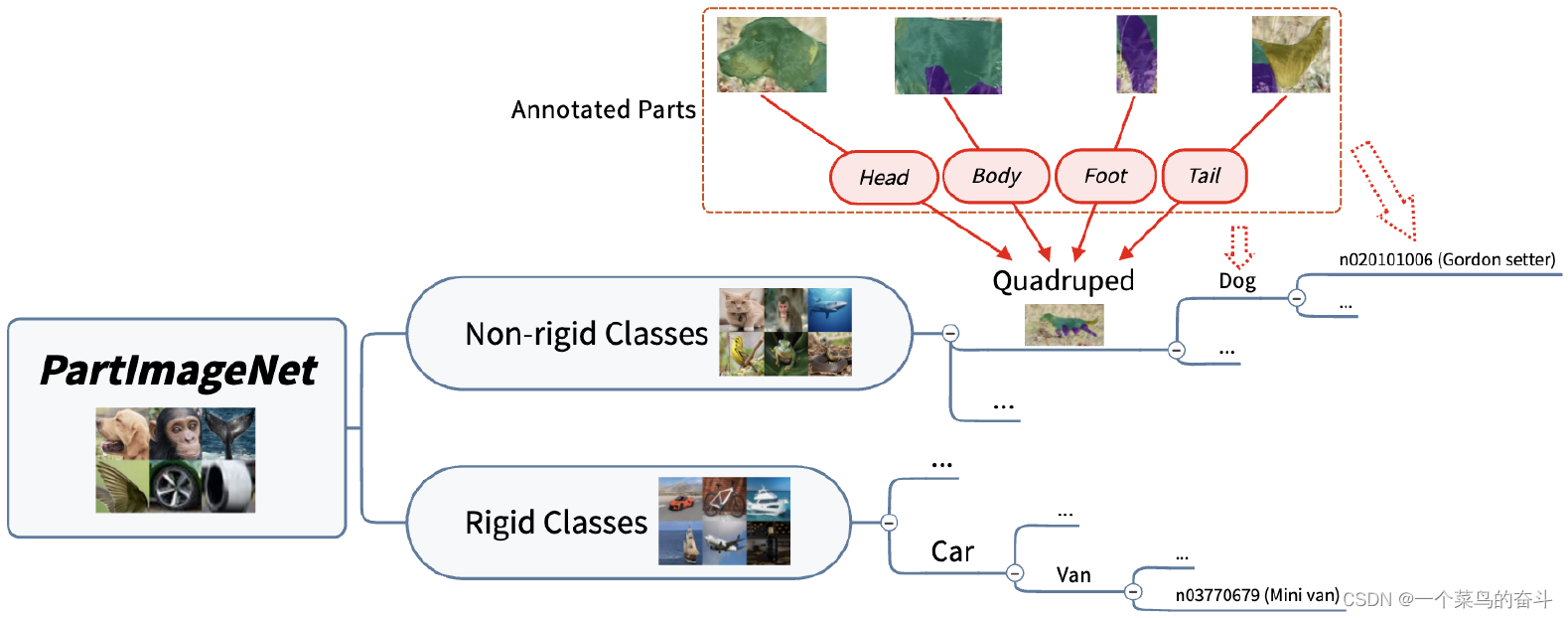
Introduction to the PartImageNet Semantic Part Segmentation dataset

Spark Learning: Add Custom Optimization Rules for Spark Sql

CodeIgniter 打开错误日志

技能大赛训练题:域用户和组织单元的创建

CLion用于STM32开发
Network layer key protocol - IP protocol
C# control ToolStripProgressBar usage
LeetCode·每日一题·1161.最大层内元素和·层次遍历
随机推荐
滑窗法切分数据
3.爬虫之Scrapy框架1安装与使用
LeetCode·每日一题·1161.最大层内元素和·层次遍历
Flutter键盘可见性
图像大面积缺失,也能逼真修复,新模型CM-GAN兼顾全局结构和纹理细节
Sliding window method to segment data
Introduction to the PartImageNet Semantic Part Segmentation dataset
计算机复试面试问题(计算机面试常见问题)
ERROR 1819 (HY000) Your password does not satisfy the current policy requirements
C#控件CheckBox的使用
Adding data nodes and decommissioning data nodes in the cluster
STM32——软件SPI控制AD7705[通俗易懂]
全局平均池化层替代全连接层(最大池化和平均池化的区别)
Install the latest pytorch gpu version
拥塞控制,CDN,端到端
Solution for browser hijacking by hao360
基于神经网络的多柔性梁耦合结构振动控制
Introduction to using NPM
EXCEL如何快速拆分合并单元格数据
PHP Serialization: eval