当前位置:网站首页>INS/GPS组合导航类型简介
INS/GPS组合导航类型简介
2022-07-06 19:13:00 【python小白(下阶段小黑)】
INS/GPS组合导航类型简介
前言
导航技术为用户提供运动物体的位置、速度和姿态信息。常用导航方法有卫星导航和惯性导航。
卫星导航以其定位精度高、区域覆盖范围广、用户端价格低廉且便于应用等优点,在导航领域备受关注,成为应用最广泛的导航技术[1]。虽然卫星导航系统有着精度高、全天候、连续实时定位的能力,但其定位性能受环境影响较大,如在城市峡谷、隧道等信号遮挡严重或干扰较大的地方,卫星导航的精度会大幅降低,甚至会出现定位解算失败的情况。惯性导航技术建立在牛顿经典力学定律的基础上,通过航迹推算原理求得物体的实时位置[2]。惯性导航具有独立工作能力强、不易受外界干扰等优点,但由于航位推算过程存在误差累积,因此惯性导航的精度是随时间发散的,不能独立地进行长期定位工作。
卫星导航和惯性导航存在天然的优势互补,随着导航技术的发展,捷联式惯性导航(Strap-down Inertial Navigation System , SINS)和全球定位系统(Global Positioning System ,GPS)构成的SINS/GPS组合导航系统成为领域研究热点,可以实现两个子系统的互补更新,有效解决GPS在丢失信号的情况下无法确定位置以及INS存在长期积累误差的问题[3]。
组合导航系统核心技术在于状态方程构建、量测方程构建和系统融合算法的设计。
内容
根据INS和GPS耦合程度的不同,INS/GPS的组合形式可以划分为松组合(Loosely Coupled ,LC)、紧组合(Tightly Coupled ,TC)以及深组合或超紧组合(Ultra-tightly Coupled)[3]。
松组合基于GNSS解算的位置和速度,结构简单、技术成熟、易实现,且精度也较高;紧组合基于GNSS观测量,如伪距和伪距率,构建较松组合复杂但效果更好;
深组合,基于GNSS信号,主要是通过调整接收机结构、提高接收机性能来实现,目前的技术不成熟、实现难度较高。
黄凤钊等人以伪距(伪距变化率)残差作为观测信息, 实现了SINS/GPS伪距组合导航系统的软硬件设计,静态和动态实验均取得了较好的精度[9]。陈家斌等人设计了一种加权平均跟踪误差估计器,能对伪距观测量中的码环跟踪误差进行有效的修正,系统的导航精度有明显的提高[10]。
PSINS中19维组合导航代码可参考一下
function [avp, xkpk, zkrk, sk, ins, kf] = sinsgps(imu, gps, ins, davp, imuerr, lever, dT, rk, Pmin, Rmin, fbstr, isfig)
% 19-state SINS/GNSS integrated navigation Kalman filter.
% The 19-state includes:
% [phi(3); dvn(3); dpos(3); eb(3); db(3); lever(3); dT(1)]
% The 3- or 6- measurements are:
% [dvn(3)] or [dvn(3); dpos(3)]
%
% Prototype: [avp, xkpk, zkrk, sk, ins, kf] = sinsgps(imu, gps, ins, davp, imuerr, lever, dT, rk, Pmin, Rmin, fbstr, isfig)
% Inputs: imu - IMU array [wm, vm, t]
% gps - GNSS array [vn, pos, t] or [pos, t];
% ins - ins array, set by function 'insinit'
% davp - AVP array for P0 setting
% imuerr - set by function 'imuerrset', for P0 and Qk setting
% lever - lever arm from IMU to GNSS, if lever(4)=0 then Pk(lever)=0 for no lever estimation
% dT - time delay from IMU to GNSS, if dT(2)=0 then Pk(dT)=0 for no time delay estimation
% rk - measurement noise std(dpos) or std([dvn;dpos])
% Pmin - Pmin setting, Pmin<=0 for no Pmin constrain
% Rmin - Rmin setting, Rmin<=0 for no adaptive KF, Rmin=0~1 scale for adaptive KF and Rmin = Rk*Rmin
% fbstr - KF feedback string from 'avpedLT'
% isfig - figure flag
%
% Example 1:
% [avp1, xkpk, zkrk, sk, ins1, kf1] = sinsgps(imu, gps, 300);
%
% Example 2:
% ins = insinit([yaw;pos], ts);
% avperr = avperrset([60;300], 1, 100);
% imuerr = imuerrset(0.03, 100, 0.001, 1);
% Pmin = [avperrset([0.1,1],0.001,0.01); gabias(0.1, [10,30]); [0.01;0.01;0.01]; 0.0001].^2;
% Rmin = vperrset(0.001, 0.01).^2;
% [avp1, xkpk, zkrk, sk, ins1, kf1] = sinsgps(imu, gps, ins, avperr, imuerr, rep3(1), 0.01, vperrset(0.1,10), Pmin, Rmin, 'avp');
%
% Example 3:
% t0 = 1; t1 = 916;
% avp0 = getat(avp,t0);
% ins = insinit(avp0, ts);
% avperr = avperrset([60;300], 1, 10);
% imuerr = imuerrset(0.5, 1000, 0.1, 25);
% Pmin = [avperrset([0.2,1.0],0.01,0.2); gabias(0.01, [10,10]); [0.01;0.01;0.01]; 0.001].^2;
% Rmin = vperrset(0.1, 0.3).^2;
% [avp1, xkpk, zkrk, sk, ins1, kf] = sinsgps(imu(t0/ts:t1/ts,:), gps, ins, avperr, imuerr, rep3(1), 0.1, vperrset(0.1,10), Pmin, Rmin, 'avped');
%
% See also kfinit, kfupdate, imugpssyn, igsplot, insupdate, posprocessing.
% Copyright(c) 2009-2021, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 09/10/2013, 06/02/2021, 02/11/2021
边栏推荐
- 你不可不知道的Selenium 8种元素定位方法,简单且实用
- Redis入门完整教程:复制拓扑
- Difference and the difference between array and array structure and linked list
- Five reasons for clothing enterprises to deploy MES management system
- 慧通编程入门课程 - 2A闯关
- MySQL
- 安全巡检的工作
- 从零安装Redis
- MySQL - common functions - string functions
- Overall query process of PostgreSQL
猜你喜欢

【2022国赛模拟】多边形——计算几何、二分答案、倍增
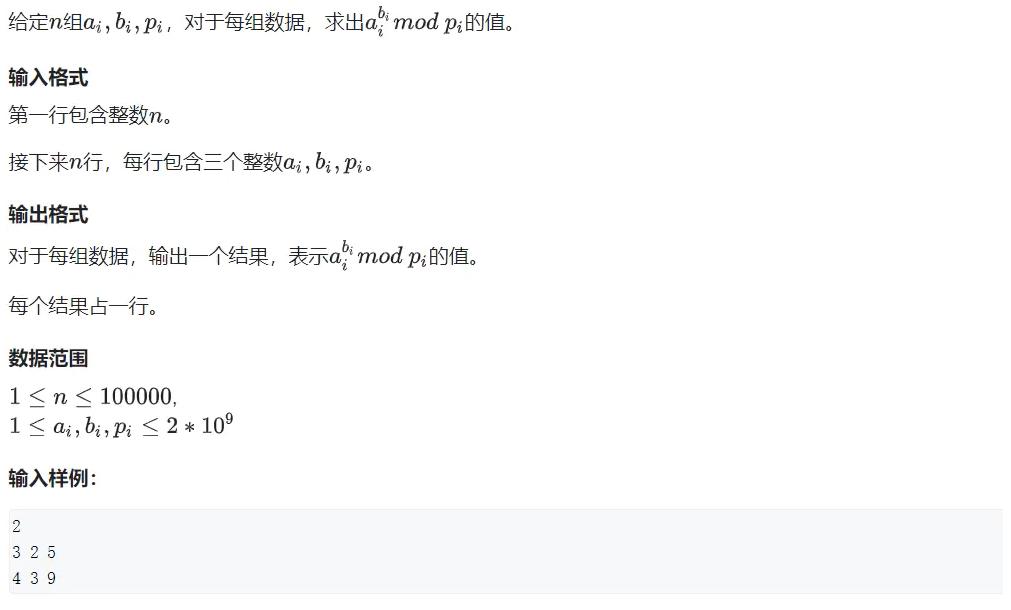
Number theory --- fast power, fast power inverse element
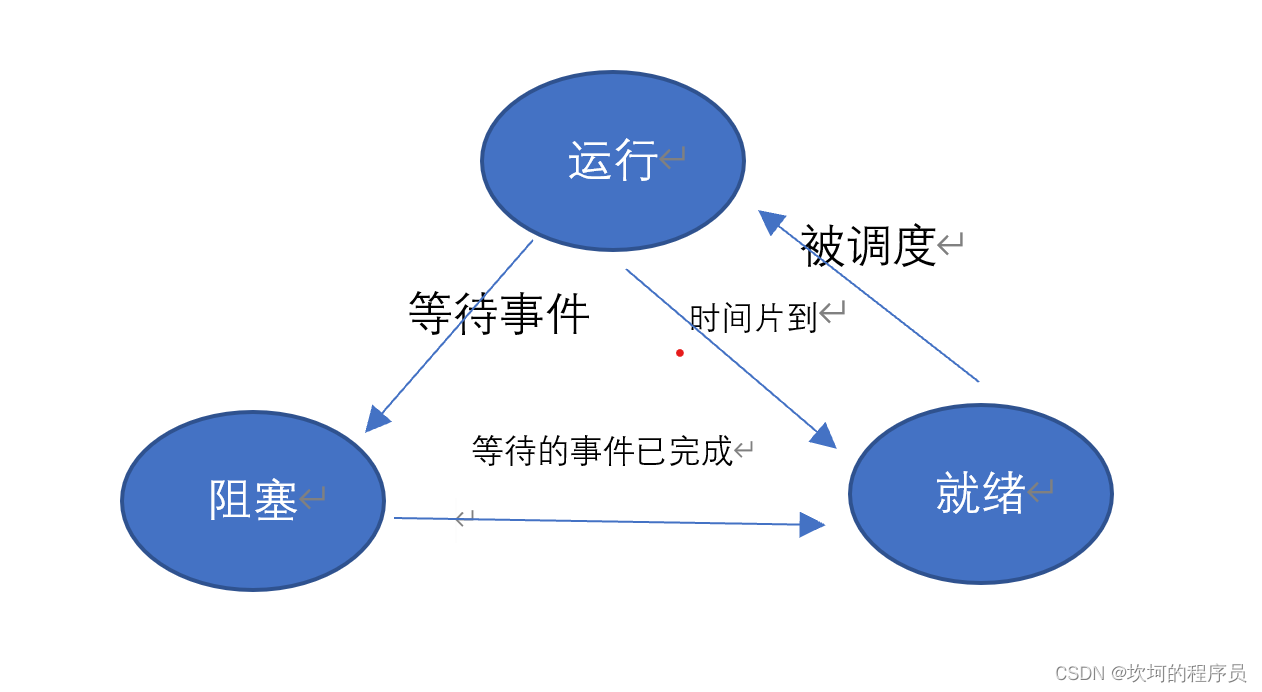
Fundamentals of process management
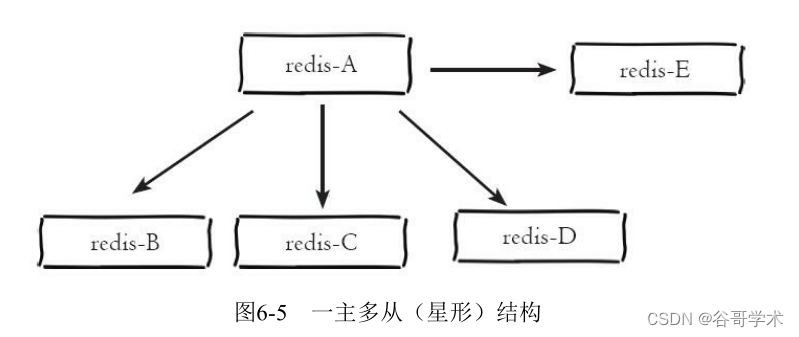
Redis入门完整教程:复制拓扑

How to design interface test cases? Teach you a few tips to draft easily

The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
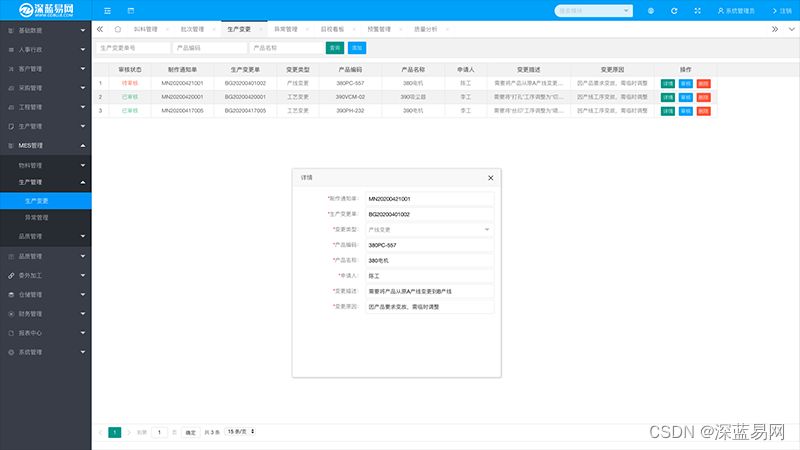
实施MES管理系统时,哪些管理点是需要注意的
C#/VB.NET 删除Word文档中的水印
Statistics of radar data in nuscenes data set

Go swagger use
随机推荐
Convert widerperson dataset to Yolo format
Read fast RCNN in one article
The cities research center of New York University recruits master of science and postdoctoral students
Summer Challenge database Xueba notes (Part 2)~
Work of safety inspection
普通测试年薪15w,测试开发年薪30w+,二者差距在哪?
Django数据库(SQlite)基本入门使用教程
所谓的消费互联网仅仅只是做行业信息的撮合和对接,并不改变产业本身
Five reasons for clothing enterprises to deploy MES management system
实施MES管理系统时,哪些管理点是需要注意的
fiddler的使用
Software testing -- common assertions of JMeter interface testing
QT common Concepts-1
Integerset of PostgreSQL
Digital scrolling increases effect
fasterxml ToStringSerializerBase报错
unity 自定义webgl打包模板
从零安装Redis
leetcode:736. LISP syntax parsing [flowery + stack + status enumaotu + slots]
C#/VB.NET 删除Word文档中的水印