当前位置:网站首页>TF coordinate transformation of common components of ros-9 ROS
TF coordinate transformation of common components of ros-9 ROS
2022-07-05 08:45:00 【m0_ forty-six million ninety-three thousand eight hundred and t】
One 、 Concept
Coordinate transformation is simply normalization , That is, the measured position information between other objects and sensors on the robot is replaced by the information between the object and the origin of the robot .
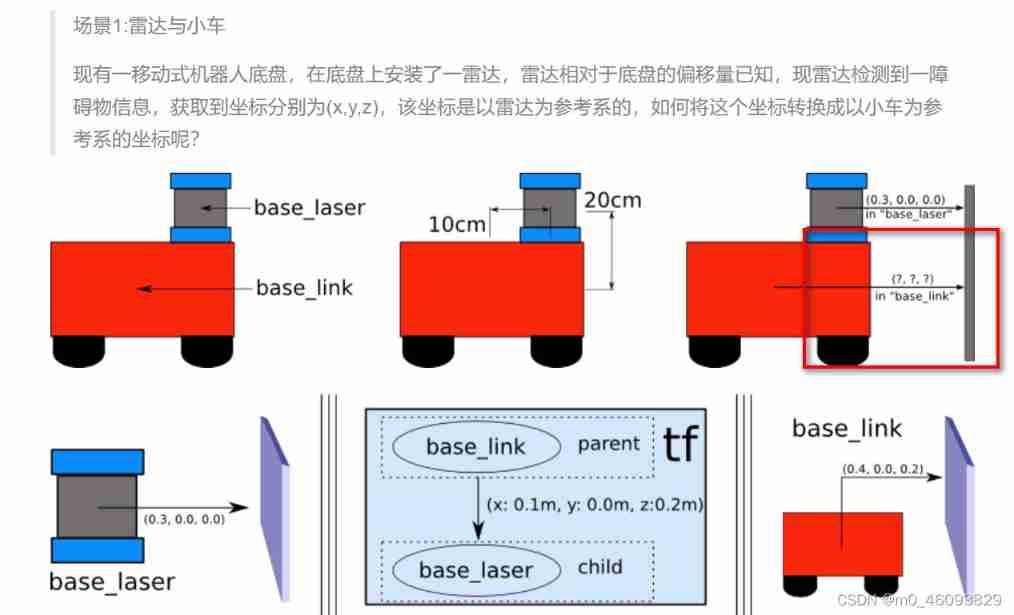
According to what we learned in high school , As long as the relative relationship between different coordinate systems is clear , Any coordinate point can be converted between different coordinate systems , But this computing implementation is commonly used , And the algorithm is a little complicated , So in ROS The related modules are directly encapsulated in : Coordinate transformation (TF).TF Coordinate transformation is used in ROS Realize the transformation of points or vectors between different coordinate systems .
TF Coordinate transformation through broadcast TF Transform and monitor TF Transformation to achieve
Two 、 Check whether the current coordinate systems in the system are connected
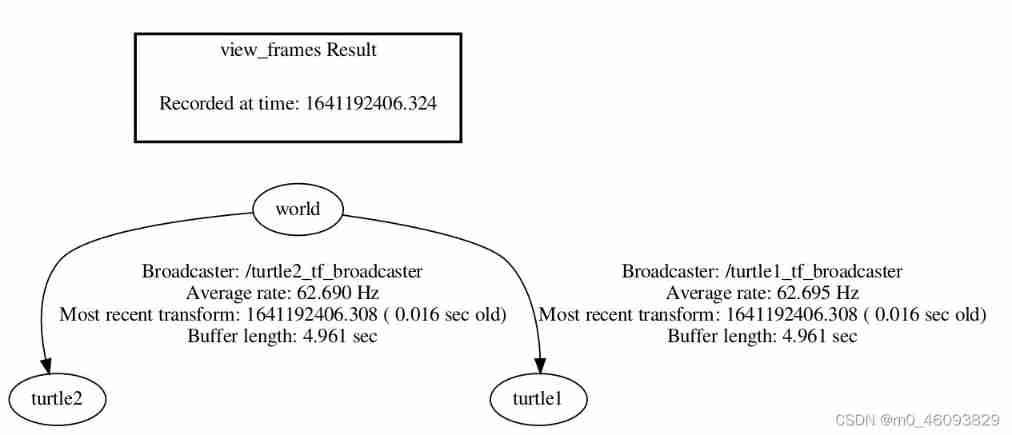
rosrun tf view_framesRunning the above specification will generate .gv and .pdf2 File , It is used to display the connectivity of various coordinate systems in the current system
For example, running ros Medium turtle_tf_demo, Three coordinate systems are defined in the of this routine : Coordinate origin ,turtle1,turtle2.turtle2 Will listen turtle1d be relative to world The position of , And then change your position . Follow in real time turtle1.
Before that, install the package :
sudo apt-get install ros-melodic-turtle-tfThe running routine code is as follows :
roslaunch turtle_tf turtle_tf_demo.launchAnd then run :rosrun tf view_frames You can view the relationship between coordinate systems in the current system .
3、 ... and 、 Real-time query tf The positional relationship between any two coordinate systems of tree species :
rosrun tf tf_echo Root coordinate system Target coordinate system for example : I'm still running turtle_tf_demo.launch routine , Next run
rosrun tf tf_echo turtle1 turtle 2When I keyboard control the first turtle to move , The coordinate position relationship between the second turtle and the first turtle is as follows :
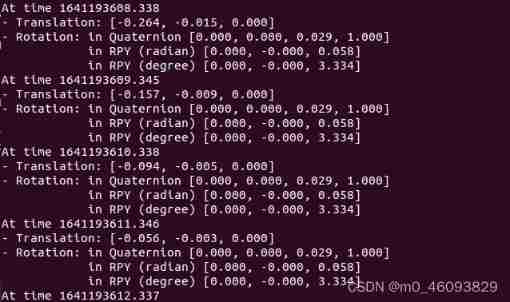
among Translation Is translation , Is the target coordinate relative to the root coordinate x,y,z Translation in three directions
rotation It's rotation , Indicates how the target coordinate system can be rotated to the root coordinate system .Rotation There are three representations
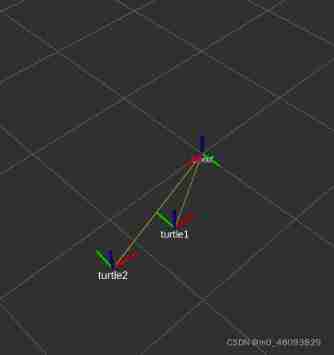
Four 、 adopt rviz Check the positional relationship between coordinate systems
function
rosrun rviz rviz 'rospack find turtle_tf' /rviz/turtle_rviz.rviz
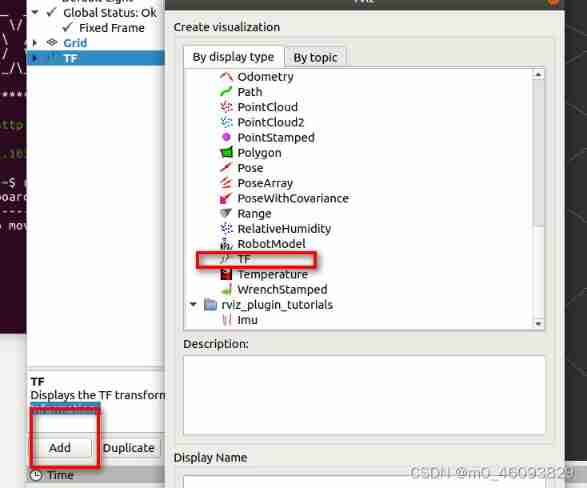
You can see world,turtle1,turtl2 The process of making coordinate changes between
边栏推荐
- 容易混淆的基本概念 成员变量 局部变量 全局变量
- 暑假第一周
- Chapter 18 using work queue manager (1)
- [daily training -- Tencent selected 50] 557 Reverse word III in string
- Halcon wood texture recognition
- 猜谜语啦(10)
- 2022.7.4-----leetcode.1200
- Wheel 1:qcustomplot initialization template
- Digital analog 2: integer programming
- C#【必备技能篇】ConfigurationManager 类的使用(文件App.config的使用)
猜你喜欢

Guess riddles (2)
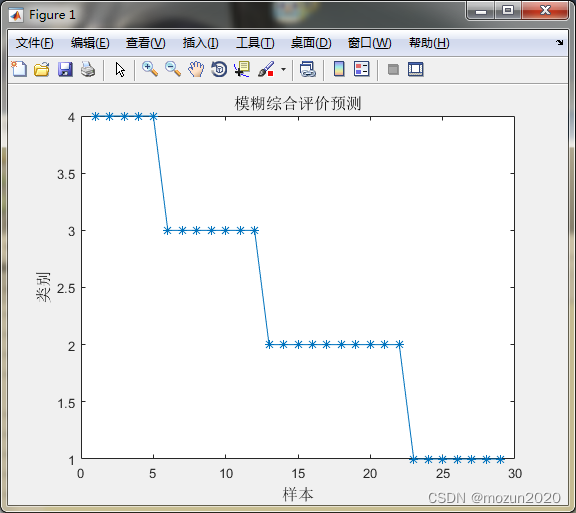
Matlab tips (28) fuzzy comprehensive evaluation
Guess riddles (3)

One question per day - replace spaces
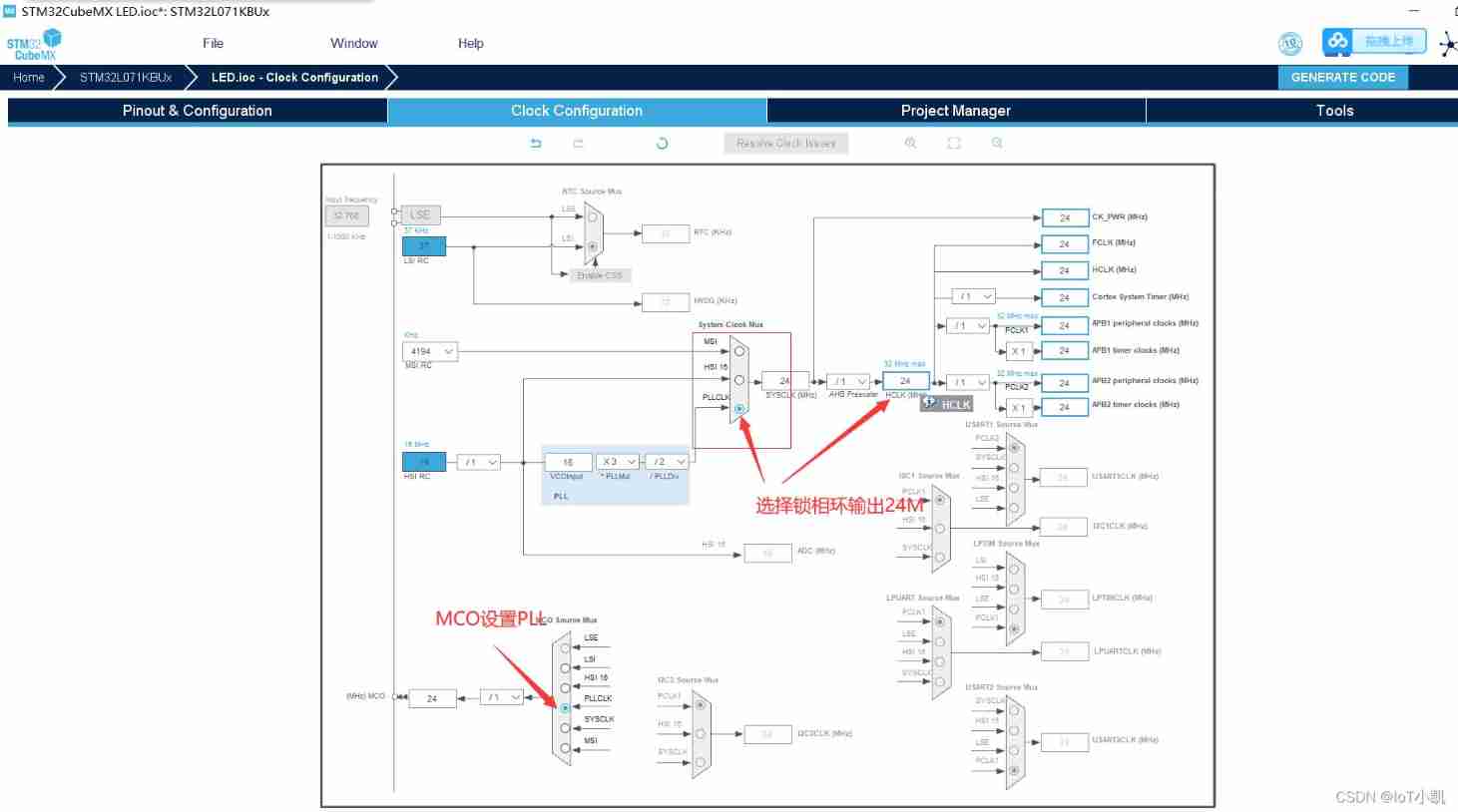
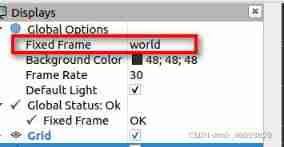
Bluebridge cup internet of things competition basic graphic tutorial - clock selection

猜谜语啦(9)

Halcon snap, get the area and position of coins
Beautiful soup parsing and extracting data
![[matlab] matlab reads and writes Excel](/img/80/78e4c7fcd27473526e480d4b930e2c.jpg)
[matlab] matlab reads and writes Excel
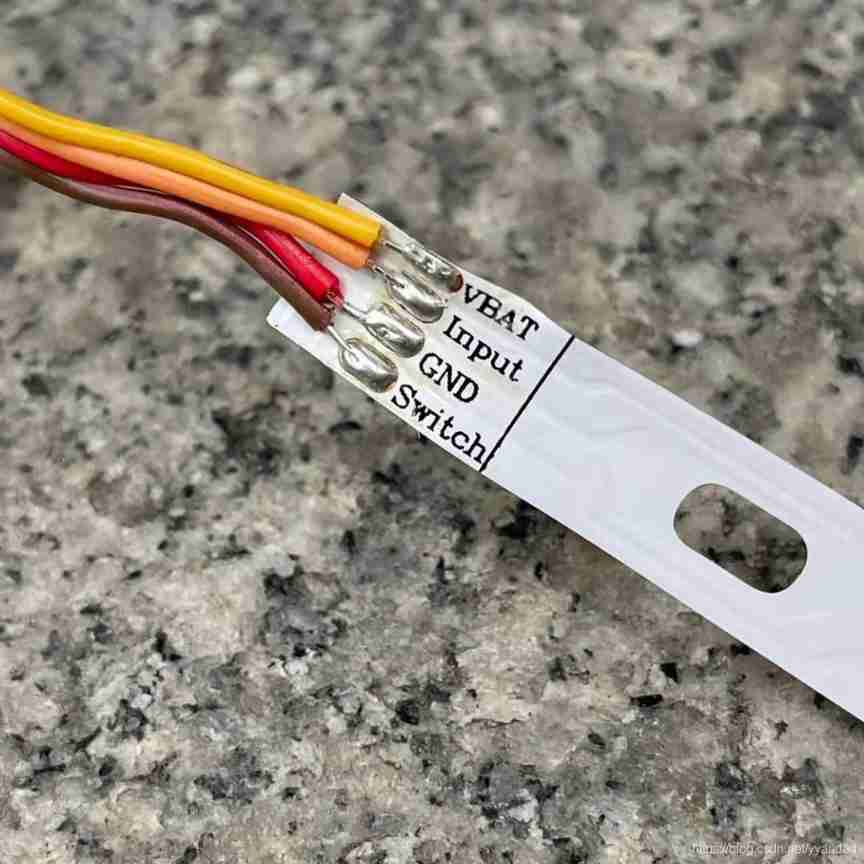
Old Wang's esp8266 and old Wu's ws2818 light strip
随机推荐
Search data in geo database
LLVM之父Chris Lattner:为什么我们要重建AI基础设施软件
【日常訓練--騰訊精選50】557. 反轉字符串中的單詞 III
696. 计数二进制子串
Explore the authentication mechanism of StarUML
It cold knowledge (updating ing~)
golang 基础 —— golang 向 mysql 插入的时间数据和本地时间不一致
某公司文件服务器迁移方案
Digital analog 1: linear programming
Guess riddles (6)
319. 灯泡开关
Arduino burning program and Arduino burning bootloader
Basic number theory - factors
MATLAB小技巧(28)模糊綜合評價
Halcon shape_ trans
12、动态链接库,dll
Yolov4 target detection backbone
Arrangement of some library files
皮尔森相关系数
Run menu analysis