当前位置:网站首页>PI control of three-phase grid connected inverter - off grid mode
PI control of three-phase grid connected inverter - off grid mode
2022-07-02 09:38:00 【Quikk】
Three phase grid connected inverter is off grid PI control
Off grid control of three-phase grid connected inverter
The basic difference between inverter parallel and off grid control
When the three-phase grid connected inverter is connected to the grid , Its main function is to transmit electric energy to the large power grid . At this time, the system parallel node voltage is Big grid clamping , Therefore, it is only necessary to control the inverter to output the current that meets the power requirements , Control objectives can be achieved , Therefore, the grid connected inverter in this state is generally equivalent to Current source .
When the three-phase grid connected inverter is off grid , Its main function is to output the voltage that meets the load operation conditions , Current system System output current All by load Self parameters decision . Therefore, the grid connected inverter in this state is generally equivalent to Voltage source .
Basic topology of off grid inverter
The following figure shows the inverter topology in the off grid state , Here we use pure resistance instead of pure resistive load :

Take the direction of the inverter pointing to the load current as the positive direction of the current reference , In the picture i a i_{a} ia The direction indicated is positive .
{ U a − L d i a d t − i a R − U C a = 0 U b − L d i b d t − i b R − U C b = 0 U c − L d i c d t − i c R − U C c = 0 C d u C a d t = i a − i g a C d u C b d t = i b − i g b C d u C c d t = i c − i g c (1) \left\{ \begin{matrix}{} U_a-L\frac{di_a}{dt}-i_aR-U_{Ca}=0\\ U_b-L\frac{di_b}{dt}-i_bR-U_{Cb}=0\\ U_c-L\frac{di_c}{dt}-i_cR-U_{Cc}=0\\ C\frac{du_{Ca}}{dt}=i_a-i_{ga}\\ C\frac{du_{Cb}}{dt}=i_b-i_{gb}\\ C\frac{du_{Cc}}{dt}=i_c-i_{gc}\\ \end{matrix} \right.\tag{1} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧Ua−Ldtdia−iaR−UCa=0Ub−Ldtdib−ibR−UCb=0Uc−Ldtdic−icR−UCc=0CdtduCa=ia−igaCdtduCb=ib−igbCdtduCc=ic−igc(1)
You can get :
{ d i a d t = 1 L U a − R L i a − 1 L U C a d i b d t = 1 L U b − R L i b − 1 L U C b d i c d t = 1 L U c − R L i c − 1 L U C c d u C a d t = 1 C i a − 1 C i g a d u C b d t = 1 C i b − 1 C i g b d u C c d t = 1 C i c − 1 C i g c (2) \left\{ \begin{matrix}{} \frac{di_a}{dt}=\frac{1}{L}U_a-\frac{R}{L}i_a-\frac{1}{L}U_{Ca}\\ \frac{di_b}{dt}=\frac{1}{L}U_b-\frac{R}{L}i_b-\frac{1}{L}U_{Cb}\\ \frac{di_c}{dt}=\frac{1}{L}U_c-\frac{R}{L}i_c-\frac{1}{L}U_{Cc}\\ \frac{du_{Ca}}{dt}=\frac{1}{C}i_a-\frac{1}{C}i_{ga}\\ \frac{du_{Cb}}{dt}=\frac{1}{C}i_b-\frac{1}{C}i_{gb}\\ \frac{du_{Cc}}{dt}=\frac{1}{C}i_c-\frac{1}{C}i_{gc}\\ \end{matrix} \right.\tag{2} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧dtdia=L1Ua−LRia−L1UCadtdib=L1Ub−LRib−L1UCbdtdic=L1Uc−LRic−L1UCcdtduCa=C1ia−C1igadtduCb=C1ib−C1igbdtduCc=C1ic−C1igc(2)
In the form of a matrix :
{ [ d i a d t d i b d t d i c d t ] = 1 L [ U a U b U c ] − R L [ i a i b i c ] − 1 L [ U C a U C b U C c ] [ d U C a d t d U C b d t d U C c d t ] = 1 C [ i a i b i c ] − 1 C [ i g a i g b i g c ] (3) \left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]= \frac{1}{L} \left[ \begin{matrix}{} U_a\\ U_b\\ U_c\\ \end{matrix} \right]- \frac{R}{L} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{L} \left[ \begin{matrix}{} U_{Ca}\\ U_{Cb}\\ U_{Cc}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{Ca}}{dt}\\ \frac{dU_{Cb}}{dt}\\ \frac{dU_{Cc}}{dt} \end{matrix} \right]= \frac{1}{C} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{C} \left[ \begin{matrix}{} i_{ga}\\ i_{gb}\\ i_{gc}\\ \end{matrix} \right] \end{matrix} \right.\tag{3} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiadtdibdtdic⎦⎤=L1⎣⎡UaUbUc⎦⎤−LR⎣⎡iaibic⎦⎤−L1⎣⎡UCaUCbUCc⎦⎤⎣⎡dtdUCadtdUCbdtdUCc⎦⎤=C1⎣⎡iaibic⎦⎤−C1⎣⎡igaigbigc⎦⎤(3)
α β \alpha\beta αβ Inverter equation in coordinate system
And the known abc- α β \alpha\beta αβ The positive and inverse transformation matrix is :
[ U α U β U 0 ] = T a b c − α β [ U a U b U c ] = 2 3 × [ 1 − 1 2 − 1 2 0 3 2 − 3 2 1 1 1 ] [ U a U b U c ] (4) \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ U_0 \end{matrix} \right] = T_{abc-\alpha\beta} \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right] = \frac{2}{3}\times \left[ \begin {matrix} 1 & -\frac{1}{2} & -\frac{1}{2}\\ 0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}\\ 1 & 1 & 1 \end{matrix} \right] \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right]\tag{4} ⎣⎡UαUβU0⎦⎤=Tabc−αβ⎣⎡UaUbUc⎦⎤=32×⎣⎡101−21231−21−231⎦⎤⎣⎡UaUbUc⎦⎤(4)
[ U a U b U c ] = T α β − a b c [ U α U β U 0 ] = [ 1 0 1 2 − 1 2 3 2 1 2 − 1 2 − 3 2 1 2 ] [ U α U β U 0 ] (5) \left[ \begin {matrix}{} U_a\\ U_b\\ U_c \end{matrix} \right]= T_{\alpha\beta-abc} \left[ \begin {matrix} U_{\alpha}\\ U_{\beta}\\ U_0 \end{matrix} \right]= \left[ \begin {matrix} 1 & 0 & \frac{1}{2}\\ -\frac{1}{2} & \frac{\sqrt{3}}{2} & \frac{1}{2}\\ -\frac{1}{2} & -\frac{\sqrt{3}}{2} & \frac{1}{2} \end{matrix} \right] \left[ \begin {matrix} U_{\alpha}\\ U_{\beta}\\ U_0 \end{matrix} \right]\tag{5} ⎣⎡UaUbUc⎦⎤=Tαβ−abc⎣⎡UαUβU0⎦⎤=⎣⎢⎡1−21−21023−23212121⎦⎥⎤⎣⎡UαUβU0⎦⎤(5)
Here we add 0 The axis is to make the transformation matrix into a square matrix , It is conducive to the inversion , actually 0 Axis No participation Control operation uses .
fitting (3) Multiply both sides at the same time T a b c − α β T_{abc-\alpha\beta} Tabc−αβ The inverter equation can be transformed to α β \alpha\beta αβ In coordinate system , Available :
T a b c − α β [ d i a d t d i b d t d i c d t ] = 1 L T a b c − α β [ U a U b U c ] − R L T a b c − α β [ i a i b i c ] − 1 L T a b c − α β [ U C a U C b U C c ] \begin{matrix}{} T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]= \frac{1}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} U_a\\ U_b\\ U_c\\ \end{matrix} \right]- \frac{R}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} U_{Ca}\\ U_{Cb}\\ U_{Cc}\\ \end{matrix} \right]\\ \end{matrix}{} Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=L1Tabc−αβ⎣⎡UaUbUc⎦⎤−LRTabc−αβ⎣⎡iaibic⎦⎤−L1Tabc−αβ⎣⎡UCaUCbUCc⎦⎤
Note here that only
[ U α U β U 0 ] = T a b c − α β [ U a U b U c ] \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ U_0 \end{matrix} \right]= T_{abc-\alpha\beta} \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right] ⎣⎡UαUβU0⎦⎤=Tabc−αβ⎣⎡UaUbUc⎦⎤
therefore T a b c − α β [ d i a d t d i b d t d i c d t ] T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤ It needs to be calculated separately , The calculation process is as follows :
[ i α i β i 0 ] ′ = ( T a b c − α β [ i a i b i c ] ) ′ = ( T a b c − α β ) ′ [ i a i b i c ] + ( T a b c − α β ) [ d i a d t d i b d t d i c d t ] \left[ \begin {matrix}{} i_\alpha\\ i_\beta\\ i_0 \end{matrix} \right]' = (T_{abc-\alpha\beta} \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right])' = (T_{abc-\alpha\beta})' \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right] + (T_{abc-\alpha\beta}) \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] ⎣⎡iαiβi0⎦⎤′=(Tabc−αβ⎣⎡iaibic⎦⎤)′=(Tabc−αβ)′⎣⎡iaibic⎦⎤+(Tabc−αβ)⎣⎡dtdiadtdibdtdic⎦⎤
therefore
T a b c − α β [ d i a d t d i b d t d i c d t ] = ( T a b c − α β [ i a i b i c ] ) ′ − ( T a b c − α β ) ′ [ i a i b i c ] T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] = (T_{abc-\alpha\beta} \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right])' - (T_{abc-\alpha\beta})' \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right] Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=(Tabc−αβ⎣⎡iaibic⎦⎤)′−(Tabc−αβ)′⎣⎡iaibic⎦⎤
and ( T a b c − α β ) (T_{abc-\alpha\beta}) (Tabc−αβ) Is a constant matrix , therefore
( T a b c − α β ) ′ = 0 (T_{abc-\alpha\beta})'=0 (Tabc−αβ)′=0
therefore :
T a b c − α β [ d i a d t d i b d t d i c d t ] = [ d i α d t d i β d t d i 0 d t ] T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] = \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right] Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=⎣⎡dtdiαdtdiβdtdi0⎦⎤
The same can be :
{ [ d i α d t d i β d t d i 0 d t ] = 1 L [ U α U β U 0 ] − R L [ i α i β i 0 ] − 1 L [ U C α U C β U C 0 ] [ d U C α d t d U C β d t d U C 0 d t ] = 1 C [ i α i β i 0 ] − 1 C [ i g α i g β i g 0 ] (6) \left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta}\\ U_0\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ U_{C0}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{C\alpha}}{dt}\\ \frac{dU_{C\beta}}{dt}\\ \frac{dU_{C0}}{dt} \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{g\alpha}\\ i_{g\beta}\\ i_{g0}\\ \end{matrix} \right] \end{matrix} \right.\tag{6} ⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiαdtdiβdtdi0⎦⎤=L1⎣⎡UαUβU0⎦⎤−LR⎣⎡iαiβi0⎦⎤−L1⎣⎡UCαUCβUC0⎦⎤⎣⎡dtdUCαdtdUCβdtdUC0⎦⎤=C1⎣⎡iαiβi0⎦⎤−C1⎣⎡igαigβig0⎦⎤(6)
dq Inverter equation in coordinate system
And the known α β \alpha\beta αβ-dq The positive and inverse transformation matrix is :
[ U d U q ] = T α β − d q [ U α U β ] = [ c o s φ s i n φ − s i n φ c o s φ ] [ U α U β ] \left[ \begin {matrix}{} U_d\\ U_q\\ \end{matrix} \right] = T_{\alpha\beta-dq} \left[ \begin {matrix} U_\alpha\\ U_\beta\\ \end{matrix} \right] = \left[ \begin {matrix} cos\varphi & sin\varphi \\ -sin\varphi & cos\varphi \end{matrix} \right] \left[ \begin {matrix} U_\alpha\\ U_\beta\\ \end{matrix} \right] [UdUq]=Tαβ−dq[UαUβ]=[cosφ−sinφsinφcosφ][UαUβ]
[ U α U β ] = T d q − α β U d U q = [ c o s φ − s i n φ s i n φ c o s φ ] [ U d U q ] \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ \end{matrix} \right] = T_{dq-\alpha\beta} \begin {matrix} U_d\\ U_q\\ \end{matrix} = \left[ \begin {matrix} cos\varphi & -sin\varphi \\ sin\varphi & cos\varphi \end{matrix} \right] \left[ \begin {matrix} U_d\\ U_q\\ \end{matrix} \right] [UαUβ]=Tdq−αβUdUq=[cosφsinφ−sinφcosφ][UdUq]
Put the above α β \alpha\beta αβ Remove the inverter equation in coordinates 0 Axis equation , And multiply it by the transformation matrix T α β − d q T_{\alpha\beta-dq} Tαβ−dq Available :
T α β − d q [ d i α d t d i β d t ] = 1 L T α β − d q [ U α U β ] − R L T α β − d q [ i α i β ] − 1 L T α β − d q [ U C α U C β ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt} \end{matrix} \right] = \frac{1}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta} \end{matrix} \right] - \frac{R}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta} \end{matrix} \right] - \frac{1}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ \end{matrix} \right]\\ Tαβ−dq[dtdiαdtdiβ]=L1Tαβ−dq[UαUβ]−LRTαβ−dq[iαiβ]−L1Tαβ−dq[UCαUCβ]
The same process as above , Need to find T α β − d q [ d i α d t d i β d t ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\end{matrix} \right] Tαβ−dq[dtdiαdtdiβ], here φ = ω t \varphi=\omega t φ=ωt , ( T α β − d q ) ′ (T_{\alpha\beta-dq})' (Tαβ−dq)′ No more for 0.
( T α β − d q ) ′ = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] (T_{\alpha\beta-dq})' = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (Tαβ−dq)′=[−ωsinφ−ωcosφωcosφ−ωsinφ]
T α β − d q [ d i α d t d i β d t ] = = [ d i d d t d i q d t ] − [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] [ i α i β ] = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] ( T α β − d q ) − 1 [ i d i q ] = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] ( T α β − d q ) − 1 [ i d i q ] = ω [ 0 1 − 1 0 ] [ i d i q ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt} \end{matrix} \right] == \left[ \begin{matrix}{} \frac{di_{d}}{dt}\\ \frac{di_{q}}{dt} \end{matrix} \right] - \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta} \end{matrix} \right] = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (T_{\alpha\beta-dq})^{-1} \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right]\\ = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (T_{\alpha\beta-dq})^{-1} \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right] = \omega \left[ \begin{matrix}{} 0 & 1 \\ -1 & 0 \end{matrix} \right] \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right] Tαβ−dq[dtdiαdtdiβ]==[dtdiddtdiq]−[−ωsinφ−ωcosφωcosφ−ωsinφ][iαiβ]=[−ωsinφ−ωcosφωcosφ−ωsinφ](Tαβ−dq)−1[idiq]=[−ωsinφ−ωcosφωcosφ−ωsinφ](Tαβ−dq)−1[idiq]=ω[0−110][idiq]
Substituting into the system equation, we can get dq The inverter equation in the coordinate system is :
{ [ d i d d t d i q d t ] = 1 L [ U d U q ] − R L [ i d i q ] − 1 L [ U C d U C q ] + ω [ i q − i d ] [ d U C d d t d U C q d t ] = 1 C [ i d i q ] − 1 C [ i g d i g q ] + ω [ U C q − U C d ] (7) \left \{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{d}}{dt}\\ \frac{di_{q}}{dt}\\ \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{d}\\ U_{q}\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{d}\\ i_{q}\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{Cd}\\ U_{Cq}\\ \end{matrix} \right] + \omega \left[ \begin{matrix}{} i_{q}\\ -i_{d}\\ \end{matrix} \right] \\ \left[ \begin{matrix}{} \frac{dU_{Cd}}{dt}\\ \frac{dU_{Cq}}{dt}\\ \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{d}\\ i_{q}\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{gd}\\ i_{gq}\\ \end{matrix} \right] +\omega \left[ \begin{matrix}{} U_{Cq}\\ -U_{Cd}\\ \end{matrix} \right] \\ \end{matrix} \right.\tag{7} ⎩⎪⎪⎨⎪⎪⎧[dtdiddtdiq]=L1[UdUq]−LR[idiq]−L1[UCdUCq]+ω[iq−id][dtdUCddtdUCq]=C1[idiq]−C1[igdigq]+ω[UCq−UCd](7)
At this point, you can find the system d The existence of the axis equation is related to q Phenomenon of shaft coupling , Therefore, it is necessary to control the system accurately dq Shaft decoupling .
fitting (7) Laplace transform can get :
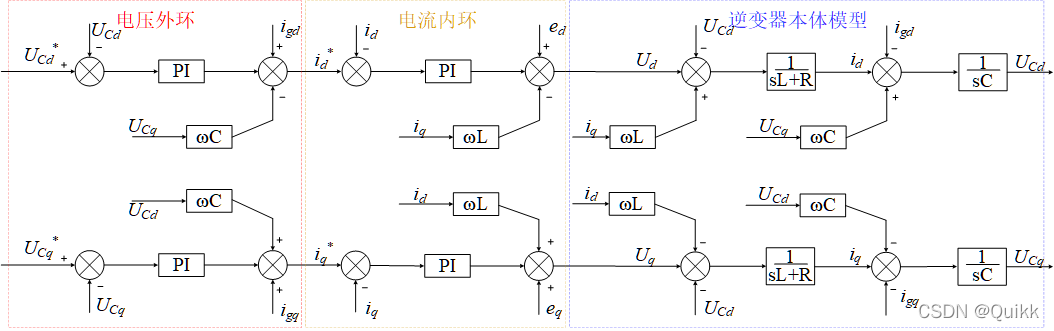
{ i d = i g d + s C U C d − ω C U C q i q = i g q + s C U C q + ω C U C d U d = ( s L + R ) i d + U C d − ω L i q U q = ( s L + R ) i q + U C q + ω L i d (8) \left\{ \begin{matrix}{} i_d = i_{gd}+sCU_{Cd}-\omega CU_{Cq}\\ i_q = i_{gq}+sCU_{Cq}+\omega CU_{Cd}\\ U_d = (sL+R)i_{d}+U_{Cd}-\omega Li_{q}\\ U_q = (sL+R)i_{q}+U_{Cq}+\omega Li_{d}\\ \end{matrix} \right.\tag{8} ⎩⎪⎪⎨⎪⎪⎧id=igd+sCUCd−ωCUCqiq=igq+sCUCq+ωCUCdUd=(sL+R)id+UCd−ωLiqUq=(sL+R)iq+UCq+ωLid(8)
Usage (8) The following block diagram can be drawn .

According to the inverter body model, double PI Control schematic diagram , Because by Combine after decoupling PI controller Precise control can be achieved .
Grid connected inverter PI Controller constant value tracking
about PI controller
G ( s ) = K P ( 1 + K i s ) = K P s + K P K i s G ( j ω ) = K P j ω + K P K i j ω G_{(s)}=K_P(1+\frac{K_i}{s})=\frac{K_Ps+K_PK_i}{s}\\ G(j\omega) = \frac{K_Pj\omega+K_PK_i}{j\omega} \\ G(s)=KP(1+sKi)=sKPs+KPKiG(jω)=jωKPjω+KPKi
therefore :
G ( j 0 ) = K P j 0 + K P K i j 0 = ∞ G(j0) = \frac{K_Pj0+K_PK_i}{j0} = \infty \\ G(j0)=j0KPj0+KPKi=∞
At this time, the closed-loop transmittal is :
A = G ( j 0 ) 1 + G ( j 0 ) = 1 A=\frac{G_{(j0)} }{1+G_{(j0)}} = 1 A=1+G(j0)G(j0)=1
therefore PI The controller pair frequency is 0 The signal of ( DC signal ) Can achieve Tracking without static error ! Therefore, in the above process, the inverter control model needs to be transformed to dq Axis , because dq Transformation is based on PLL The output voltage angle is transformed , So the three-phase current is dq In coordinate system (d The shaft component is the current amplitude ,q The axis component is zero ). Decoupling is to eliminate other shaft pairs PI The impact of control .
Simulation results
SPWM Modulation signal :
Output line voltage ( Before filter ):
Load side phase voltage (0.1s Grid connection ,0.8s Given power step ):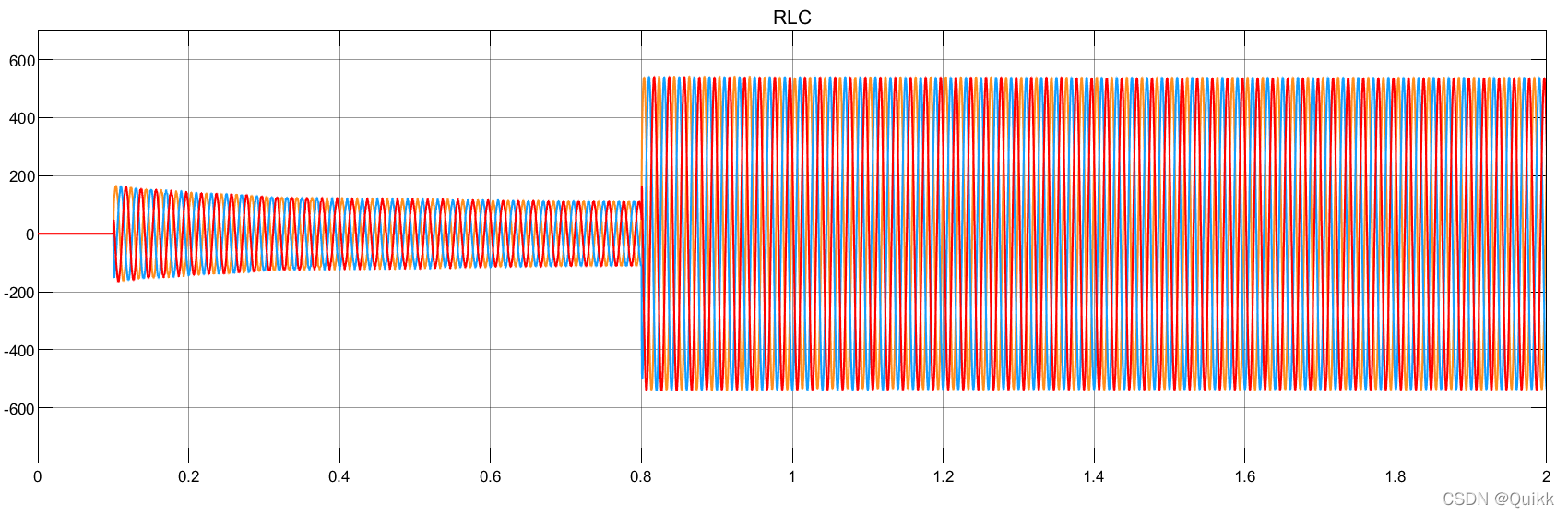
Output power :
simulation model : Model links
边栏推荐
- 微服务实战|手把手教你开发负载均衡组件
- 自定義Redis連接池
- How to choose between efficiency and correctness of these three implementation methods of distributed locks?
- Typeerror: X () got multiple values for argument 'y‘
- Who is better for Beijing software development? How to find someone to develop system software
- 分布式锁的这三种实现方式,如何在效率和正确性之间选择?
- JDBC回顾
- VIM操作命令大全
- Matplotlib swordsman line - first acquaintance with Matplotlib
- Mysql 多列IN操作
猜你喜欢

Operation and application of stack and queue

Say goodbye to 996. What are the necessary plug-ins in idea?

hystrix 实现请求合并

QT QLabel样式设置
Failed to configure a DataSource: ‘url‘ attribute is not specified and no embedd
Watermelon book -- Chapter 5 neural network

Read 30 minutes before going to bed every day_ day4_ Files
微服务实战|声明式服务调用OpenFeign实践

三相逆变器离网控制——PR控制

Read Day6 30 minutes before going to bed every day_ Day6_ Date_ Calendar_ LocalDate_ TimeStamp_ LocalTime
随机推荐
每天睡前30分钟阅读Day6_Day6_Date_Calendar_LocalDate_TimeStamp_LocalTime
Ora-12514 problem solving method
Activity的创建和跳转
三相并网逆变器PI控制——离网模式
How to use PHP spoole to implement millisecond scheduled tasks
每天睡前30分钟阅读Day5_Map中全部Key值,全部Value值获取方式
Matplotlib swordsman line - layout guide and multi map implementation (Updated)
Supplier selection and prequalification of Oracle project management system
Beats (filebeat, metricbeat), kibana, logstack tutorial of elastic stack
Knife4j 2.X版本文件上传无选择文件控件问题解决
记录下对游戏主机配置的个人理解与心得
MySql报错:unblock with mysqladmin flush-hosts
Matplotlib swordsman - a stylist who can draw without tools and code
Chrome user script manager tempermonkey monkey
Record personal understanding and experience of game console configuration
zk配置中心---Config Toolkit配置与使用
每天睡觉前30分钟阅读_day4_Files
MySQL default transaction isolation level and row lock
Thinkphp5 how to determine whether a table exists
Navicat 远程连接Mysql报错1045 - Access denied for user ‘root‘@‘222.173.220.236‘ (using password: YES)