当前位置:网站首页>粒子滤波 PF——在机动目标跟踪中的应用(粒子滤波VS扩展卡尔曼滤波)
粒子滤波 PF——在机动目标跟踪中的应用(粒子滤波VS扩展卡尔曼滤波)
2022-06-26 15:06:00 【脑壳二】
粒子滤波 PF——在机动目标跟踪中的应用(粒子滤波VS扩展卡尔曼滤波)
对于该博客跟踪代码以及问题探讨可以联系:WX:ZB823618313
对于其他跟踪定位问题的代码及探讨也可以联系
粒子滤波 PF——在目标跟踪中的应用
原创不易,路过的各位大佬请点个赞
一、问题描述(离散时间非线性系统描述)
考虑一般非线性系统模型,
x k = f ( x k − 1 , w k − 1 ) z k = h ( x k , v k ) (1) x_k=f(x_{k-1},w_{k-1}) \\ z_k=h(x_k,v_k ) \tag{1} xk=f(xk−1,wk−1)zk=h(xk,vk)(1)
其中 x k x_k xk为 k k k时刻的目标状态向量。 z k z_k zk为 k k k时刻量测向量(传感器数据)。这里不考虑控制器 u k u_k uk。 w k {w_k} wk和 v k {v_k} vk分别是过程噪声序列和量测噪声序列,并假设 w k w_k wk和 v k v_k vk为零均值高斯白噪声,其方差分别为 Q k Q_k Qk和 R k R_k Rk的高斯白噪声,即 w k ∼ ( 0 , Q k ) w_k\sim(0,Q_k) wk∼(0,Qk), v k ∼ ( 0 , R k ) v_k\sim(0,R_k) vk∼(0,Rk),且满足如下关系(线性高斯假设)为:
E [ w i v j ′ ] = 0 E [ w i w j ′ ] = 0 i ≠ j E [ v i v j ′ ] = 0 i ≠ j \begin{aligned} E[w_iv_j'] &=0\\ E[w_iw_j'] &=0\quad i\neq j \\ E[v_iv_j'] &=0\quad i\neq j \end{aligned} E[wivj′]E[wiwj′]E[vivj′]=0=0i=j=0i=j
二、粒子滤波 PF
核心思想:是使用一组具有相应权值的随机样本(粒子)来表示状态的后验分布。该方法的基本思路是选取一个重要性概率密度并从中进行随机抽样,得到一些带有相应权值的随机样本后,在状态观测的基础上调节权值的大小。和粒子的位置,再使用这些样本来逼近状态后验分布,最后将这组样本的加权求和作为状态的估计值。粒子滤波不受系统模型的线性和高斯假设约束,采用样本形式而不是函数形式对状态概率密度进行描述,使其不需要对状态变量的概率分布进行过多的约束,因而在非线性非高斯动态系统中广泛应用。尽管如此,粒子滤波目前仍存在计算量过大、粒子退化等关键问题亟待突破。
通常情况下选择先验分布作为重要性密度函数、即
q ( x k ∣ x k − 1 ( i ) , z k ) = p ( x k ∣ x k − 1 ( i ) ) q(x_k |x_{k-1}^{(i)}, z_{k})=p(x_k |x_{k-1}^{(i)}) q(xk∣xk−1(i),zk)=p(xk∣xk−1(i))
对该函数取重要性权值为
w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))
同样 w k ( i ) w_k^{(i)} wk(i)需要归一化得到 w ~ k ( i ) \tilde{w}_k^{(i)} w~k(i)。
标准的粒子滤波算法步骤为:
粒子滤波PF:
Step 1: 根据 p ( x 0 ) p(x_{0}) p(x0)采样得到 N N N个粒子 x 0 ( i ) ∼ p ( x 0 ) x_0^{(i)} \sim p(x_{0}) x0(i)∼p(x0)
For i = 2 : N i=2:N i=2:N
Step 2: 根据状态转移函数产生新的粒子为:$ x k ( i ) ∼ p ( x k ∣ x k − 1 ( i ) ) x_k^{(i)} \sim p(x_{k} |x_{k-1}^{(i)}) xk(i)∼p(xk∣xk−1(i))
Step 3: 计算重要性权值: w k ( i ) = w k − 1 ( i ) p ( z k ∣ x k ( i ) ) w_k^{(i)}=w_{k-1}^{(i)}p(z_k |x_{k}^{(i)}) wk(i)=wk−1(i)p(zk∣xk(i))
Step 4: 归一化重要性权值: w ~ k ( i ) = w k ( i ) ∑ j = 1 N w k ( j ) \tilde{w}_k^{(i)}=\frac{w_k^{(i)}}{\sum_{j=1}^Nw_k^{(j)}} w~k(i)=∑j=1Nwk(j)wk(i)
Step 5: 使用重采样方法对粒子进行重采样(以系统重采样为例)
Step 6: 得到 k k k时刻的后验状态估计:
E [ x ^ k ] = ∑ i = 1 N x k ( i ) w ~ k ( i ) E[\hat{x}_{k}]= \sum_{i=1}^Nx_{k}^{(i)}\tilde{w}_k^{(i)} E[x^k]=i=1∑Nxk(i)w~k(i)
End For
粒子滤波PF算法结构图

算法:系统重采样 (systematic resampling)
For i = 1 : N i=1:N i=1:N
Step 1: 初始化累积概率密度函数CDF: c 1 = 0 c_1=0 c1=0
For i = 2 : N i=2:N i=2:N
Step 2: 构造CDF: c i = c i − 1 + w k ( i ) c_i=c_{i-1}+w_k^{(i)} ci=ci−1+wk(i)
Step 3: 从CDF的底部开始: i = 1 i=1 i=1
Step 4: 采样起始点: u 1 = U [ 0 , 1 / N ] u_1=\mathcal{U}[0,1/N] u1=U[0,1/N]
End For
For j = 1 : N j=1:N j=1:N
Step 5: 沿CDF移动: u j = u 1 + ( j − 1 ) / N u_j=u_{1}+(j-1)/N uj=u1+(j−1)/N
Step 6: While u j > c i u_j>c_i uj>ci
i = i + 1 i=i+1 i=i+1
End While
Step 7: 赋值粒子: x k ( j ) = x k ( i ) x_k^{(j)}=x_k^{(i)} xk(j)=xk(i)
Step 8: 赋值权值: w k ( j ) = 1 / N w_k^{(j)}=1/N wk(j)=1/N
Step 9: 赋值父代: i ( j ) = i i^{(j)}=i i(j)=i
End For
三、仿真场景:三维雷达目标跟踪
3.1 仿真场景(三维螺旋上升机动目标)
目标模型
考虑一各三维的匀速转弯运动目标:
x k + 1 = F k x k + G k w k x_{k+1}=F_kx_k+G _kw_k xk+1=Fkxk+Gkwk
其中状态向量 x k = [ x k , x ˙ k , y k , y ˙ k , z k , z ˙ k ] ′ x_k=[x_k,\dot{x}_k,y_k,\dot{y}_k,z_k,\dot{z}_k]' xk=[xk,x˙k,yk,y˙k,zk,z˙k]′;噪声为 w k = [ w x , w y , w z ] ′ w_k=[w_x,w_y,w_z]' wk=[wx,wy,wz]′;
目标运动轨迹为三维匀速转弯运动模型
运动轨迹:螺旋上升
如果为非线性目标,则将状态转移矩阵 F k F_k Fk代替为雅可比矩阵即可。为了不是一般性这里采用线性模型进行仿真。主要处理目标跟踪,雷达量测存在的非线性滤波问题。
雷达量测模型
在三维情况下,雷达量测为距离和角度
r k m = r k + r ~ k b k m = b k + b ~ k e k m = e k + e ~ k {r}_k^m=r_k+\tilde{r}_k\\ b^m_k=b_k+\tilde{b}_k\\ e^m_k=e_k+\tilde{e}_k rkm=rk+r~kbkm=bk+b~kekm=ek+e~k
其中
r k = ( x k − x 0 ) + ( y k − y 0 ) 2 ) b k = tan − 1 y k − y 0 x k − x 0 e k = tan − 1 z k − z 0 ( x k − x 0 ) 2 + ( y k − y 0 ) 2 r_k=\sqrt{(x_k-x_0)^+(y_k-y_0)^2)}\\ b_k=\tan^{-1}{\frac{y_k-y_0}{x_k-x_0}}\\ e_k=\tan^{-1}{\frac{z_k-z_0}{\sqrt{(x_k-x_0)^2+(y_k-y_0)^2}}}\\ rk=(xk−x0)+(yk−y0)2)bk=tan−1xk−x0yk−y0ek=tan−1(xk−x0)2+(yk−y0)2zk−z0
[ x 0 , y 0 , z 0 ] [x_0,y_0,z_0] [x0,y0,z0]为雷达坐标,一般情况为0。雷达量测为 z k = [ r k , b k , e k ] ′ z_k=[r_k,b_k,e_k]' zk=[rk,bk,ek]′。雷达量测方差为
R k = cov ( v k ) = [ σ r 2 0 0 0 σ b 2 0 0 0 σ e 2 ] R_k=\text{cov}(v_k)=\begin{bmatrix}\sigma_r^2 & 0 &0\\0 & \sigma_b^2 &0\\0&0& \sigma_e^2 \end{bmatrix} Rk=cov(vk)=⎣⎡σr2000σb2000σe2⎦⎤且 σ r = 20 m \sigma_r=20m σr=20m, σ b = 20 m r a d \sigma_b=20mrad σb=20mrad, σ e = 15 m r a d \sigma_e=15mrad σe=15mrad。
性能指标
RMSE(Root mean-squared error):蒙塔卡罗次数 M = 500 M=500 M=500, x ^ k ∣ k i \hat{x}_{k|k}^i x^k∣ki为第 i i i次仿真得到的估计。
RMSE ( x ^ ) = 1 M ∑ i = 1 M ( x k − x ^ k ∣ k i ) ( x k − x ^ k ∣ k i ) ′ \text{RMSE}(\hat{x})=\sqrt{\frac{1}{M}\sum_{i=1}^{M}(\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i)(\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i)'} RMSE(x^)=M1i=1∑M(xk−x^k∣ki)(xk−x^k∣ki)′
Position RMSE ( x ^ ) = 1 M ∑ i = 1 M ( x k − x ^ k ∣ k i ) 2 + ( y k − y ^ k ∣ k i ) 2 + ( z k − z ^ k ∣ k i ) 2 \text{Position RMSE}(\hat{x})=\sqrt{\frac{1}{M}\sum_{i=1}^{M}(x_k-\hat{x}_{k|k}^i)^2+(y_k-\hat{y}_{k|k}^i)^2+(z_k-\hat{z}_{k|k}^i)^2} Position RMSE(x^)=M1i=1∑M(xk−x^k∣ki)2+(yk−y^k∣ki)2+(zk−z^k∣ki)2
Velocity RMSE ( x ^ ) = 1 M ∑ i = 1 M ( x ˙ k − x ˙ ^ k ∣ k i ) 2 + ( y ˙ k − y ˙ ^ k ∣ k i ) 2 + ( z ˙ k − z ˙ ^ k ∣ k i ) 2 \text{Velocity RMSE}(\hat{x})=\sqrt{\frac{1}{M}\sum_{i=1}^{M}(\dot{x}_k-\hat{\dot{x}}_{k|k}^i)^2+(\dot{y}_k-\hat{\dot{y}}_{k|k}^i)^2+(\dot{z}_k-\hat{\dot{z}}_{k|k}^i)^2} Velocity RMSE(x^)=M1i=1∑M(x˙k−x˙^k∣ki)2+(y˙k−y˙^k∣ki)2+(z˙k−z˙^k∣ki)2
ANEES(average normalized estimation error square), n n n 为状态维数, P k ∣ k i \mathbf{P}_{k|k}^i Pk∣ki为第 i i i次仿真滤波器输出的估计协方差
ANEES ( x ^ ) = 1 M n ∑ i = 1 M ( x k − x ^ k ∣ k i ) ′ ( P k ∣ k i ) − 1 ( x k − x ^ k ∣ k i ) \text{ANEES}(\hat{x})=\frac{1}{Mn}\sum_{i=1}^{M}(\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i)'(\mathbf{P}_{k|k}^i)^{-1} (\mathbf{x}_k-\hat{\mathbf{x}}_{k|k}^i) ANEES(x^)=Mn1i=1∑M(xk−x^k∣ki)′(Pk∣ki)−1(xk−x^k∣ki)
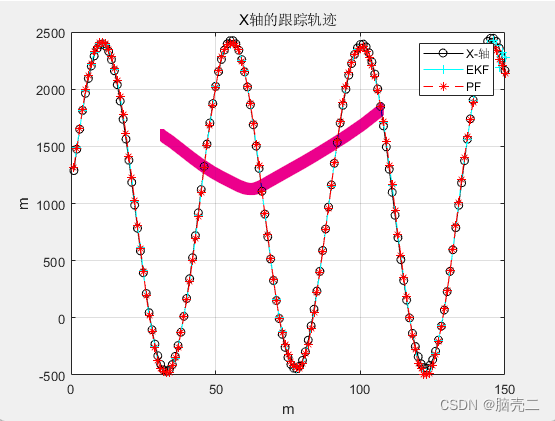
3.2 跟踪轨迹
三维跟踪轨迹:


3.3 跟踪误差


四、部分代码
对于该博客跟踪代码以及问题探讨可以联系:WX:ZB823618313
对于其他跟踪定位问题的代码及探讨也可以联系
代码:系统重采样 (systematic resampling)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 系统重采样子函数
% 输入参数:weight为原始数据对应的权重大小
% 输出参数:outIndex是根据weight筛选和复制结果
function outIndex = systematicR(weight);
N=length(weight);
N_children=zeros(1,N);
label=zeros(1,N);
label=1:1:N;
s=1/N;
auxw=0;
auxl=0;
li=0;
T=s*rand(1);
j=1;
Q=0;
i=0;
u=rand(1,N);
while (T<1)
if (Q>T)
T=T+s;
N_children(1,li)=N_children(1,li)+1;
else
i=fix((N-j+1)*u(1,j))+j;
auxw=weight(1,i);
li=label(1,i);
Q=Q+auxw;
weight(1,i)=weight(1,j);
label(1,i)=label(1,j);
j=j+1;
end
end
index=1;
for i=1:N
if (N_children(1,i)>0)
for j=index:index+N_children(1,i)-1
outIndex(j) = i;
end;
end;
index= index+N_children(1,i);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
边栏推荐
- Advanced operation of MySQL database basic SQL statement tutorial
- Sorted out a batch of script standard function modules (version 2021)
- Program analysis and Optimization - 8 register allocation
- SAP GUI 770 Download
- SAP sales data actual shipment data export sales
- TCP congestion control details | 1 summary
- 【ceph】mkdir|mksnap流程源码分析|锁状态切换实例
- 【ceph】cephfs的锁 笔记
- HR export data Excel VBA
- Shell script multi process concurrent writing method example (high level cultivation)
猜你喜欢

【文件】VFS四大struct:file、dentry、inode、super_block 是什么?区别?关系?--编辑中
MySQL数据库基本SQL语句教程之高级操作

Talk about the RPA direction planning: stick to simple and valuable things for a long time

RestCloud ETL抽取动态库表数据实践

【ceph】cephfs的锁 笔记

Lexin AWS IOT expresslink module achieves universal availability

面试高频 | 你追我赶的Flink双流join

人力资源导出数据 excel VBA
乐鑫 AWS IoT ExpressLink 模组达到通用可用性

【TcaplusDB知识库】TcaplusDB常规单据介绍

随机推荐
TCP拥塞控制详解 | 1. 概述
TCP 复位攻击原理
文献1
Optimizing for vectorization
Compile configuration in file
数据库-完整性约束
Bank of Beijing x Huawei: network intelligent operation and maintenance tamps the base of digital transformation service
Halcon C # sets the form font and adaptively displays pictures
[tcapulusdb knowledge base] tcapulusdb operation and maintenance doc introduction
php文件上传00截断
SAP gui 770 下载
杜老师说网站更新图解
Halcon C# 设置窗体字体,自适应显示图片
SAP GUI 770 Download
Vsomeip3 dual computer communication file configuration
Using restcloud ETL shell component to schedule dataX offline tasks
使用RestCloud ETL Shell组件实现定时调度DataX离线任务
Optimizing for vectorization
Notes on brushing questions (19) -- binary tree: modification and construction of binary search tree
【C语言练习——打印空心上三角及其变形】