当前位置:网站首页>FCOS3D label assignment
FCOS3D label assignment
2022-07-07 11:56:00 【烤粽子】
跟2d的FCOS差不太多,
主要是依靠图片坐标系来分配target:
def _get_target_single(self, gt_bboxes, gt_labels, gt_bboxes_3d,
gt_labels_3d, centers2d, depths, attr_labels,
points, regress_ranges, num_points_per_lvl):
"""Compute regression and classification targets for a single image."""
num_points = points.size(0)
num_gts = gt_labels.size(0)
if not isinstance(gt_bboxes_3d, torch.Tensor):
gt_bboxes_3d = gt_bboxes_3d.tensor.to(gt_bboxes.device)
if num_gts == 0:
return gt_labels.new_full((num_points,), self.background_label), \
gt_bboxes.new_zeros((num_points, 4)), \
gt_labels_3d.new_full(
(num_points,), self.background_label), \
gt_bboxes_3d.new_zeros((num_points, self.bbox_code_size)), \
gt_bboxes_3d.new_zeros((num_points,)), \
attr_labels.new_full(
(num_points,), self.attr_background_label)
# change orientation to local yaw
gt_bboxes_3d[..., 6] = -torch.atan2(
gt_bboxes_3d[..., 0], gt_bboxes_3d[..., 2]) + gt_bboxes_3d[..., 6]
areas = (gt_bboxes[:, 2] - gt_bboxes[:, 0]) * (
gt_bboxes[:, 3] - gt_bboxes[:, 1]) # [tl_x, tl_y, br_x, br_y]--> S_areas
areas = areas[None].repeat(num_points, 1) # [2] --> [30929, 2]
regress_ranges = regress_ranges[:, None, :].expand(
num_points, num_gts, 2) # [30929, 2] --> [30929, 2, 2]
gt_bboxes = gt_bboxes[None].expand(num_points, num_gts, 4)
centers2d = centers2d[None].expand(num_points, num_gts, 2)
gt_bboxes_3d = gt_bboxes_3d[None].expand(num_points, num_gts,
self.bbox_code_size)
depths = depths[None, :, None].expand(num_points, num_gts, 1)
# 每个points的坐标(xs,ys)
xs, ys = points[:, 0], points[:, 1]
xs = xs[:, None].expand(num_points, num_gts)
ys = ys[:, None].expand(num_points, num_gts)
# gt center --> offsets
## centers2d: 每个gt在2d image上的坐标
delta_xs = (xs - centers2d[..., 0])[..., None]
delta_ys = (ys - centers2d[..., 1])[..., None]
# 0. 前面的操作是主要是为了这里,获得跟网络输出相同的target_box
bbox_targets_3d = torch.cat(
(delta_xs, delta_ys, depths, gt_bboxes_3d[..., 3:]), dim=-1)
left = xs - gt_bboxes[..., 0]
right = gt_bboxes[..., 2] - xs
top = ys - gt_bboxes[..., 1]
bottom = gt_bboxes[..., 3] - ys
bbox_targets = torch.stack((left, top, right, bottom), -1)
assert self.center_sampling is True, 'Setting center_sampling to '\
'False has not been implemented for FCOS3D.'
# condition1: inside a `center bbox`
radius = self.center_sample_radius # 1.5
center_xs = centers2d[..., 0]
center_ys = centers2d[..., 1]
center_gts = torch.zeros_like(gt_bboxes)
stride = center_xs.new_zeros(center_xs.shape)
# project the points on current lvl back to the `original` sizes
# 1. 将各层特征点位置映射回输入图像中
lvl_begin = 0
for lvl_idx, num_points_lvl in enumerate(num_points_per_lvl): # [23200, 5800, 1450, 375, 104]
lvl_end = lvl_begin + num_points_lvl
stride[lvl_begin:lvl_end] = self.strides[lvl_idx] * radius # [8, 16, 32, 64, 128] * 1.5
# 每个point的缩放系数 * 半径
lvl_begin = lvl_end
# 2. 位于物体框内的位置点作为正样本候选
## 边长1.5的框 -->
center_gts[..., 0] = center_xs - stride
center_gts[..., 1] = center_ys - stride
center_gts[..., 2] = center_xs + stride
center_gts[..., 3] = center_ys + stride
cb_dist_left = xs - center_gts[..., 0] # points中心点到
cb_dist_right = center_gts[..., 2] - xs
cb_dist_top = ys - center_gts[..., 1]
cb_dist_bottom = center_gts[..., 3] - ys
center_bbox = torch.stack(
(cb_dist_left, cb_dist_top, cb_dist_right, cb_dist_bottom), -1)
inside_gt_bbox_mask = center_bbox.min(-1)[0] > 0 # anchor_box中心点落在gt_box中心点1.5单位的正方形内才有效
# condition2: limit the regression range for each location
# 3. 某位置点到物体边框的距离只有位于一定范围内才可作为正样本(每层有各自的范围)
max_regress_distance = bbox_targets.max(-1)[0]
# 确保在每层level的回归范围内
inside_regress_range = (
(max_regress_distance >= regress_ranges[..., 0])
& (max_regress_distance <= regress_ranges[..., 1]))
# center-based criterion to deal with ambiguity
# 4. 基于中心准则的模糊处理
## 4.1选出偏移量最小的gt+gt_inds
dists = torch.sqrt(torch.sum(bbox_targets_3d[..., :2]**2, dim=-1)) # offsets的欧式距离 [30929, 2]
dists[inside_gt_bbox_mask == 0] = INF # 筛选anchor
dists[inside_regress_range == 0] = INF
min_dist, min_dist_inds = dists.min(dim=1)
labels = gt_labels[min_dist_inds] # 筛选gt
labels_3d = gt_labels_3d[min_dist_inds]
attr_labels = attr_labels[min_dist_inds]
labels[min_dist == INF] = self.background_label # set as BG 10
labels_3d[min_dist == INF] = self.background_label # set as BG
attr_labels[min_dist == INF] = self.attr_background_label
## 4.2 每个point上选出对应的box_target
bbox_targets = bbox_targets[range(num_points), min_dist_inds] # [30929, 2, 4] --> [30929, 4]
bbox_targets_3d = bbox_targets_3d[range(num_points), min_dist_inds]
## 4.3 筛选centerness_targets
## 偏移量--> 斜边 / 边长1.5scale到实际三角形的边长 == 相对距离
relative_dists = torch.sqrt(
torch.sum(bbox_targets_3d[..., :2]**2,
dim=-1)) / (1.414 * stride[:, 0])
# [N, 1] / [N, 1]
centerness_targets = torch.exp(-self.centerness_alpha * relative_dists) # exp(-2.5 * relative_dists) todo?
return labels, bbox_targets, labels_3d, bbox_targets_3d, \
centerness_targets, attr_labels
边栏推荐
- 得物客服热线的演进之路
- 2022-7-7 Leetcode 844.比较含退格的字符串
- Write it down once Net a new energy system thread surge analysis
- Server to server (S2S) event (adjust)
- Ways to improve the performance of raspberry pie
- PC端页面如何调用QQ进行在线聊天?
- 提升树莓派性能的方法
- Error lnk2019: unresolved external symbol
- 118. Yanghui triangle
- LED light of single chip microcomputer learning notes
猜你喜欢
LED light of single chip microcomputer learning notes
Evolution of customer service hotline of dewu
Esp32 construction engineering add components
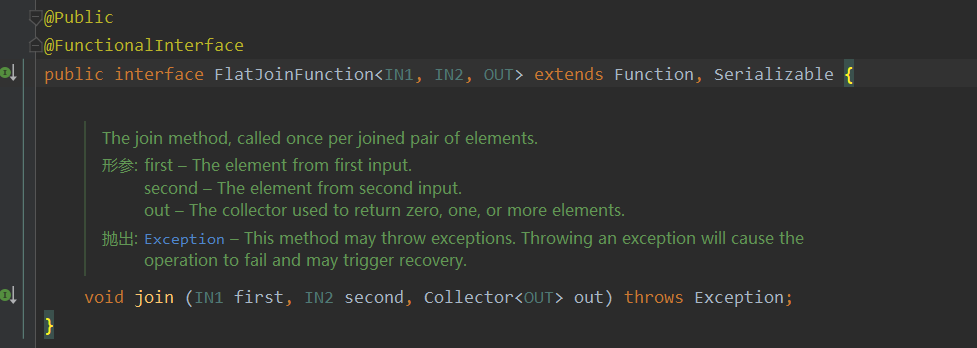
Flink | 多流转换
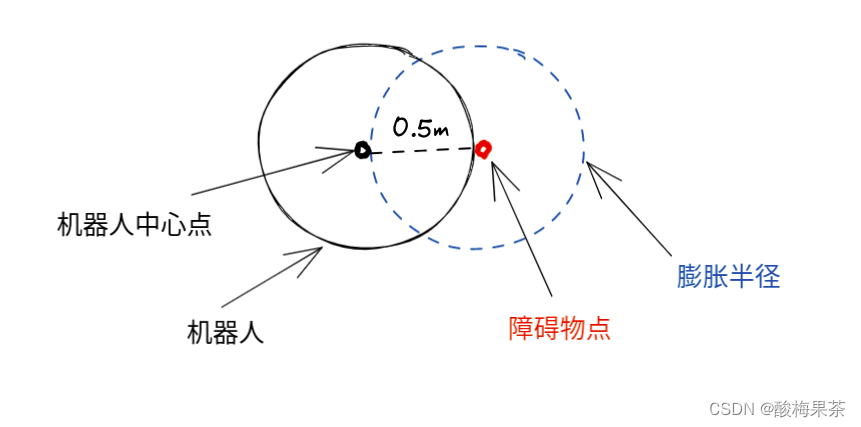
室內ROS機器人導航調試記錄(膨脹半徑的選取經驗)
Battle Atlas: 12 scenarios detailing the requirements for container safety construction

社会责任·价值共创,中关村网络安全与信息化产业联盟对话网信企业家海泰方圆董事长姜海舟先生
Error lnk2019: unresolved external symbol
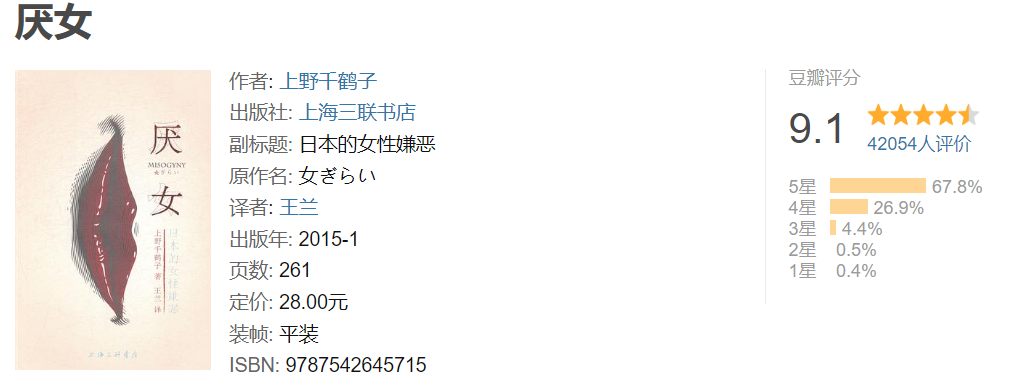
《厌女:日本的女性嫌恶》摘录
得物客服热线的演进之路
随机推荐
[fortress machine] what is the difference between cloud fortress machine and ordinary fortress machine?
Xshell connection server changes key login to password login
Mysql怎样控制replace替换的次数?
MySQL error 28 and solution
Fast development board pinctrl and GPIO subsystem experiment for itop-imx6ull - modify the device tree file
move base参数解析及经验总结
数据库系统概论-第一章绪论【概念模型、层次模型和三级模式(外模式、模式、内模式)】
得物客服热线的演进之路
The delivery efficiency is increased by 52 times, and the operation efficiency is increased by 10 times. See the compilation of practical cases of financial cloud native technology (with download)
2022-7-6 Leetcode27. Remove the element - I haven't done the problem for a long time. It's such an embarrassing day for double pointers
. Net core about redis pipeline and transactions
[etc.] what are the security objectives and implementation methods that cloud computing security expansion requires to focus on?
[1] Basic knowledge of ros2 - summary version of operation commands
Laravel5 call to undefined function openssl cipher iv length() 报错 PHP7开启OpenSSL扩展失败
[1] ROS2基础知识-操作命令总结版
Introduction to database system - Chapter 1 introduction [conceptual model, hierarchical model and three-level mode (external mode, mode, internal mode)]
2022-7-7 Leetcode 844. Compare strings with backspace
室內ROS機器人導航調試記錄(膨脹半徑的選取經驗)
"Song of ice and fire" in the eleventh issue of "open source Roundtable" -- how to balance the natural contradiction between open source and security?
Oracle advanced (V) schema solution