当前位置:网站首页>Indoor ROS robot navigation commissioning record (experience in selecting expansion radius)
Indoor ROS robot navigation commissioning record (experience in selecting expansion radius)
2022-07-07 13:31:00 【Plum fruit tea】
1. map layer
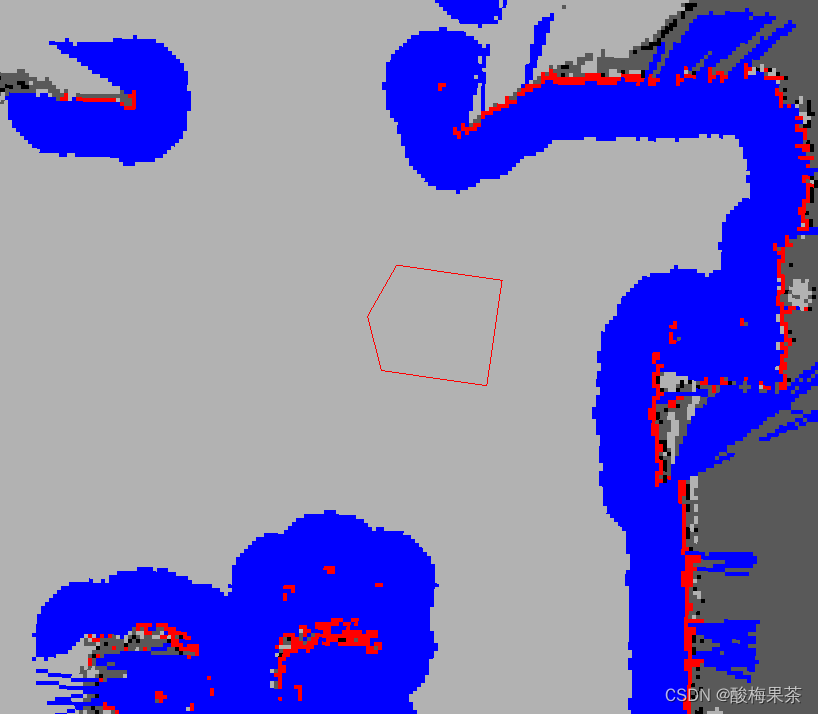
notes : In the diagram above , The red part represents the obstacles in the cost map , The blue part represents the obstacle with the expansion of the robot's inscribed radius , The red polygon represents the boundary of the robot (footprint). In order to make the robot avoid collision , The red boundary of the robot cannot intersect with the red part , The center point of the robot cannot intersect with the blue part .
Suppose there is a circular robot with a radius of 0.5m, that
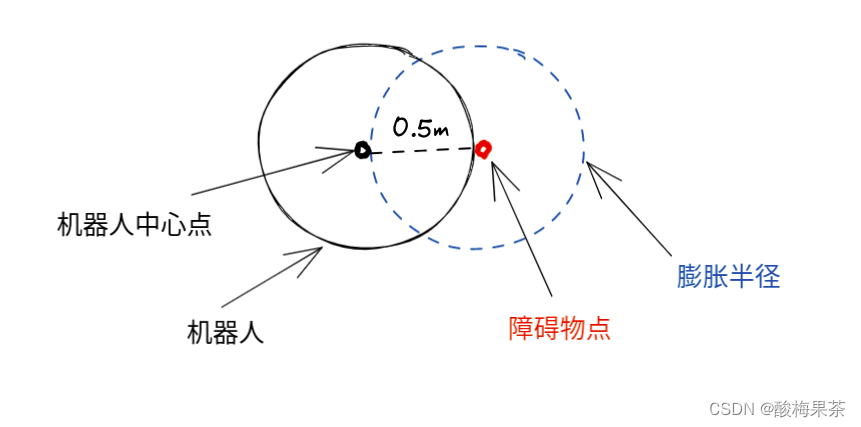
Expansion radius , The expansion layer will expand the obstacle until the radius , Generally, this value is set to the diameter of the robot chassis .
problem 1: Theoretically , The minimum expansion radius is the radius of the robot , Otherwise, it is easy to hit obstacles ? For example, the radius is 0.5m Robot , Whether the global expansion radius can be set as 0.5 A slightly larger value , for example 0.8m? [ To be verified ]
2. Common cost map layers
Static map layer : Basically unchanged layer , Usually SLAM Build a static map
Obstacle map layer : It is used to dynamically record the obstacle information perceived by the sensor
Expansive layer : Expand on the static map and obstacle map layers ( Expand outward ), To avoid the robot hitting obstacles
Other layers : Other map layers implemented through plug-ins , For example, sensor map layer
3. Experience summary of expansion radius test
The expansion radius setting is too small , There may be movement against obstacles . The radius is 0.25m Robot , Set to 0.6m There will be obvious movement against obstacles , Set to 0.8m More appropriate .
The actual size of the robot is very important , Write the actual measurement , You can't write the size larger . The measured found , Actual radius of robot 0.254m, It has been written. 0.27m( The idea was , Write the radius larger , Avoid hitting obstacles ), The test results were found to be 0.27m, Global expansion radius 1.1m, Local expansion radius 0.1m, too 80cm Narrow road of , More difficult ( Setting the transition point is not enough ). But change to the actual radius of the robot , Normal navigation can also be through 80cm Narrow road of .
Tests found , The global expansion radius has little effect on the robot passing through narrow roads , Pay more attention to the actual size and local expansion radius parameters when passing through narrow roads .
Reference link :
costmap_2d-ROS Wiki
边栏推荐
猜你喜欢

Getting started with cinnamon applet
LIS longest ascending subsequence problem (dynamic programming, greed + dichotomy)
Talk about pseudo sharing
10 张图打开 CPU 缓存一致性的大门
迅为iTOP-IMX6ULL开发板Pinctrl和GPIO子系统实验-修改设备树文件
How to make join run faster?

PACP学习笔记一:使用 PCAP 编程
Custom thread pool rejection policy
Milkdown 控件图标
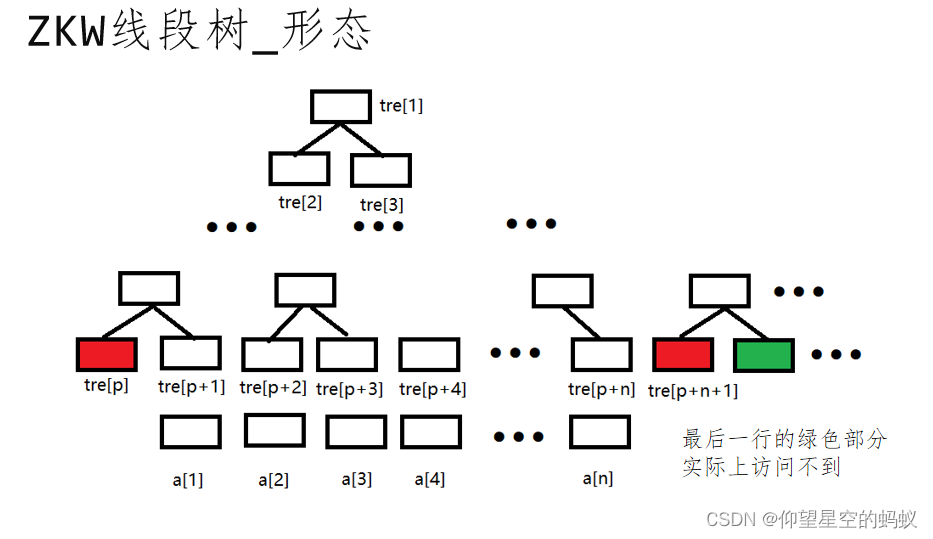
【学习笔记】zkw 线段树
随机推荐
My "troublesome" subordinates after 00: not bad for money, against leaders, and resist overtime
ESP32系列专栏
一文读懂数仓中的pg_stat
centso7 openssl 报错Verify return code: 20 (unable to get local issuer certificate)
MongoDB内部的存储原理
靠卖概念上市,认养一头牛能走多远?
How far can it go to adopt a cow by selling the concept to the market?
Distributed transaction solution
Cinnamon Applet 入门
分布式事务解决方案
Getting started with cinnamon applet
存储过程的介绍与基本使用
1、深拷贝 2、call apply bind 3、for of for in 区别
学习突围2 - 关于高效学习的方法
聊聊伪共享
Show the mathematical formula in El table
Write it down once Net a new energy system thread surge analysis
Ogre入门尝鲜
Drawerlayout suppress sideslip display
我那“不好惹”的00后下属:不差钱,怼领导,抵制加班