当前位置:网站首页>Enregistrement de la navigation et de la mise en service du robot ROS intérieur (expérience de sélection du rayon de dilatation)
Enregistrement de la navigation et de la mise en service du robot ROS intérieur (expérience de sélection du rayon de dilatation)
2022-07-07 13:30:00 【Thé aux fruits aux prunes aigres】
1. Couche de carte
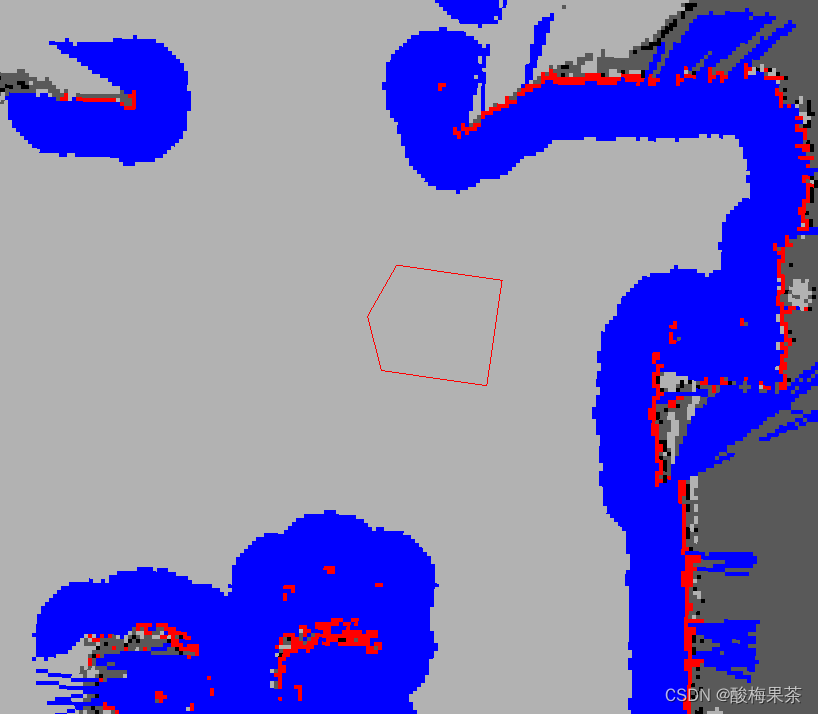
Note::Dans l'image ci - dessus,La section rouge représente les obstacles sur la carte des coûts,La partie bleue représente l'obstacle à l'expansion du rayon de coupe interne du robot,Les polygones rouges représentent les limites du robot(footprint).Pour éviter les collisions,La limite rouge du robot ne peut pas se croiser avec la partie rouge,.Le point central du robot ne peut pas se croiser avec la partie bleue.
Supposons qu'il y ait un robot circulaire avec un rayon de0.5m,Alors
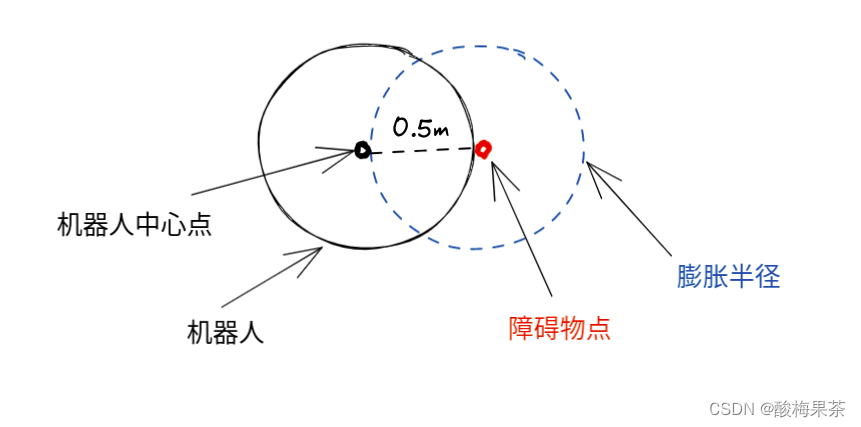
Rayon de dilatation,La couche expansive gonflera l'obstacle jusqu'à ce que ce rayon,Cette valeur est généralement fixée au diamètre du châssis du robot.
Questions1:En théorie,Le rayon de dilatation minimal est le rayon du robot,Sinon, il est facile de heurter un obstacle?Par exemple, le rayon est0.5mDes robots,Le rayon de dilatation global peut - il être réglé à un rapport0.5Une valeur légèrement plus élevée,Par exemple0.8m? [À vérifier]
2. Coût commun couche de carte
Couche de carte statique:Couche essentiellement inchangée,En général.SLAMCartes statiques établies
Couche de carte des obstacles:Utilisé pour enregistrer dynamiquement l'information sur les obstacles perçus par le capteur
Couche expansive:Expansion sur les couches de cartes statiques et de cartes d'obstacles(Expansion vers l'extérieur),Pour éviter que le robot ne heurte un obstacle
Autres couches : Autres couches de carte mises en œuvre par le plug - in , Par exemple, la couche de carte du capteur
3. Résumé de l'expérience de l'essai de rayon de dilatation
Le rayon de dilatation est trop petit , Il peut y avoir des mouvements d'obstacles .Le rayon est0.25mDes robots,Set to0.6m Il y aura des mouvements évidents d'obstacles ,Set to0.8mPlus approprié.
La taille réelle du robot est importante , Pour écrire la taille réelle de la mesure , Impossible d'augmenter la taille .Résultats mesurés, Rayon réel du robot 0.254m,C'est écrit.0.27m(L'idée était, Le rayon est plus grand. , Protection contre les obstacles ), Les résultats des tests ont été écrits comme suit: 0.27m, Rayon de dilatation global 1.1m, Rayon de dilatation local 0.1m,Oui.80cm La voie étroite ,Plus difficile( Pas trop. ). Mais changez la taille réelle du rayon du robot , La navigation normale peut également passer par 80cm La voie étroite .
Résultats des tests, Le rayon de dilatation global a peu d'effet sur le passage étroit du robot , Une attention particulière doit être accordée aux dimensions réelles et aux paramètres du rayon de dilatation local lorsque le passage est trop étroit. .
Liens de référence:
costmap_2d-ROS Wiki
边栏推荐
猜你喜欢
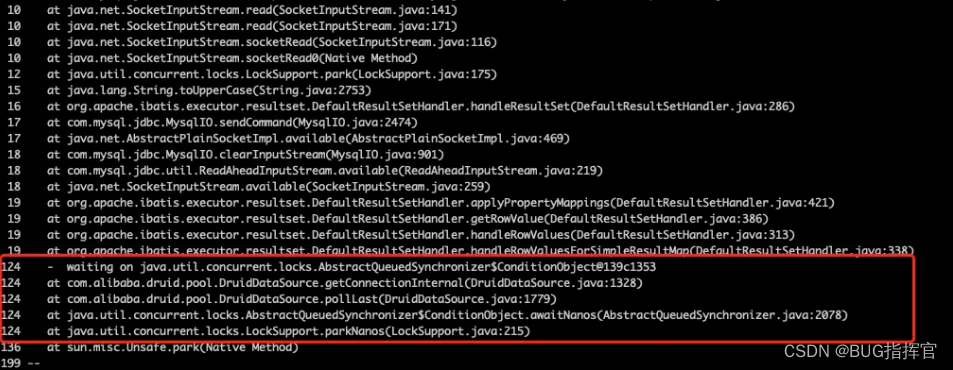
记一次 .NET 某新能源系统 线程疯涨 分析

centso7 openssl 报错Verify return code: 20 (unable to get local issuer certificate)
How to make join run faster?
线程池拒绝策略最佳实践

QQ的药,腾讯的票

About how appium closes apps (resolved)
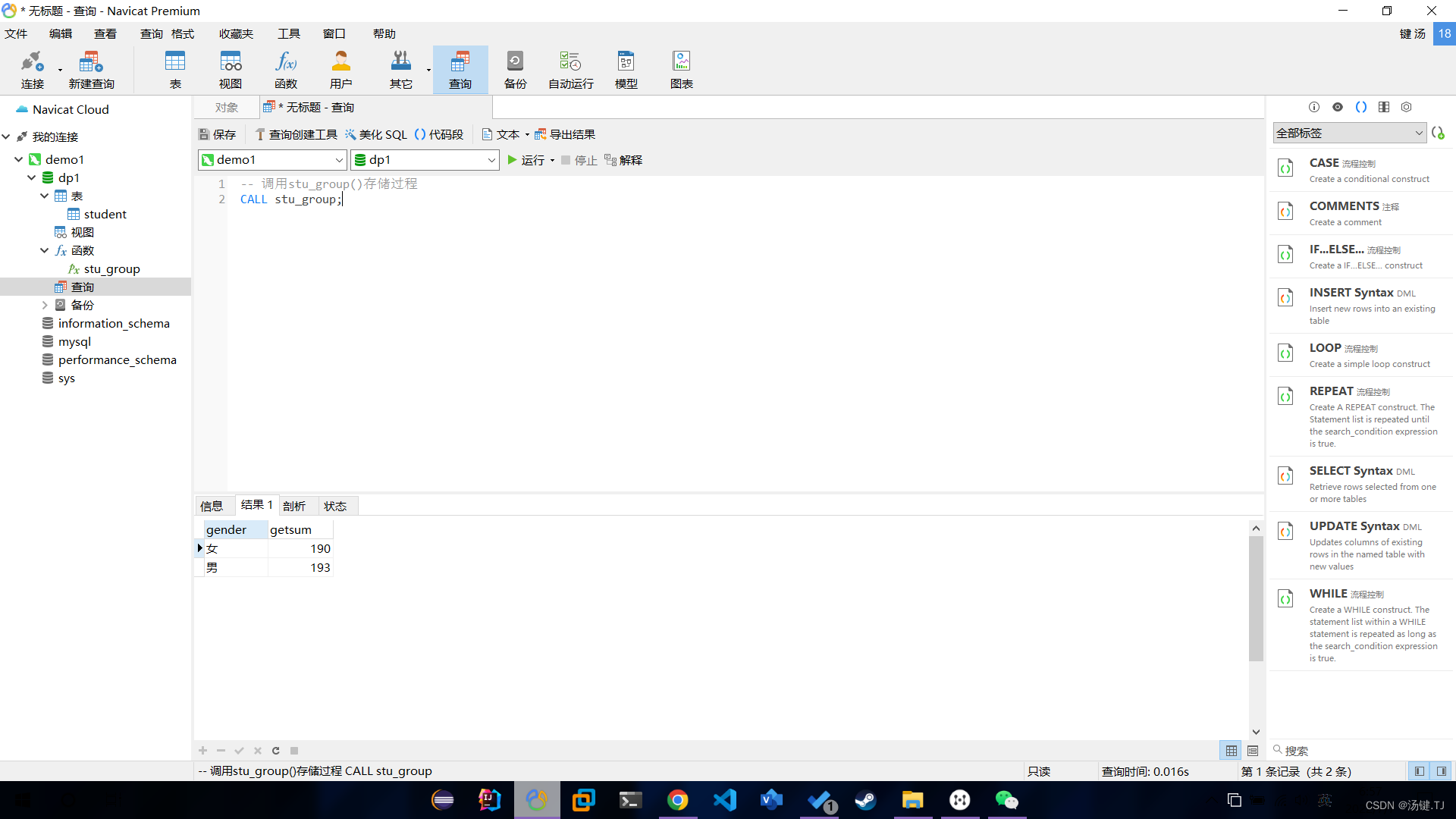
Introduction and basic use of stored procedures
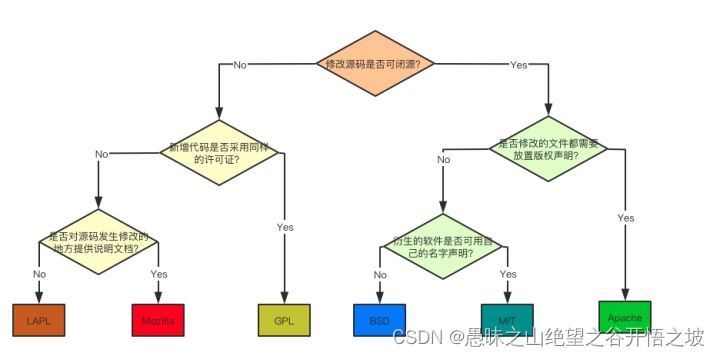
详细介绍六种开源协议(程序员须知)
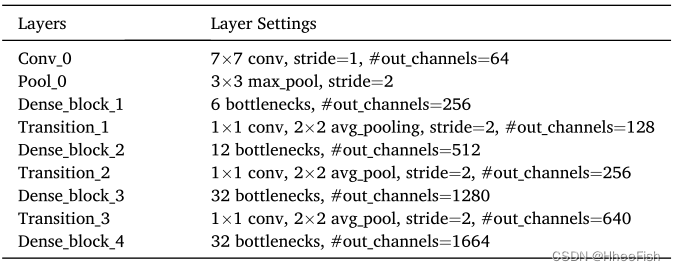
Isprs2021/ remote sensing image cloud detection: a geographic information driven method and a new large-scale remote sensing cloud / snow detection data set
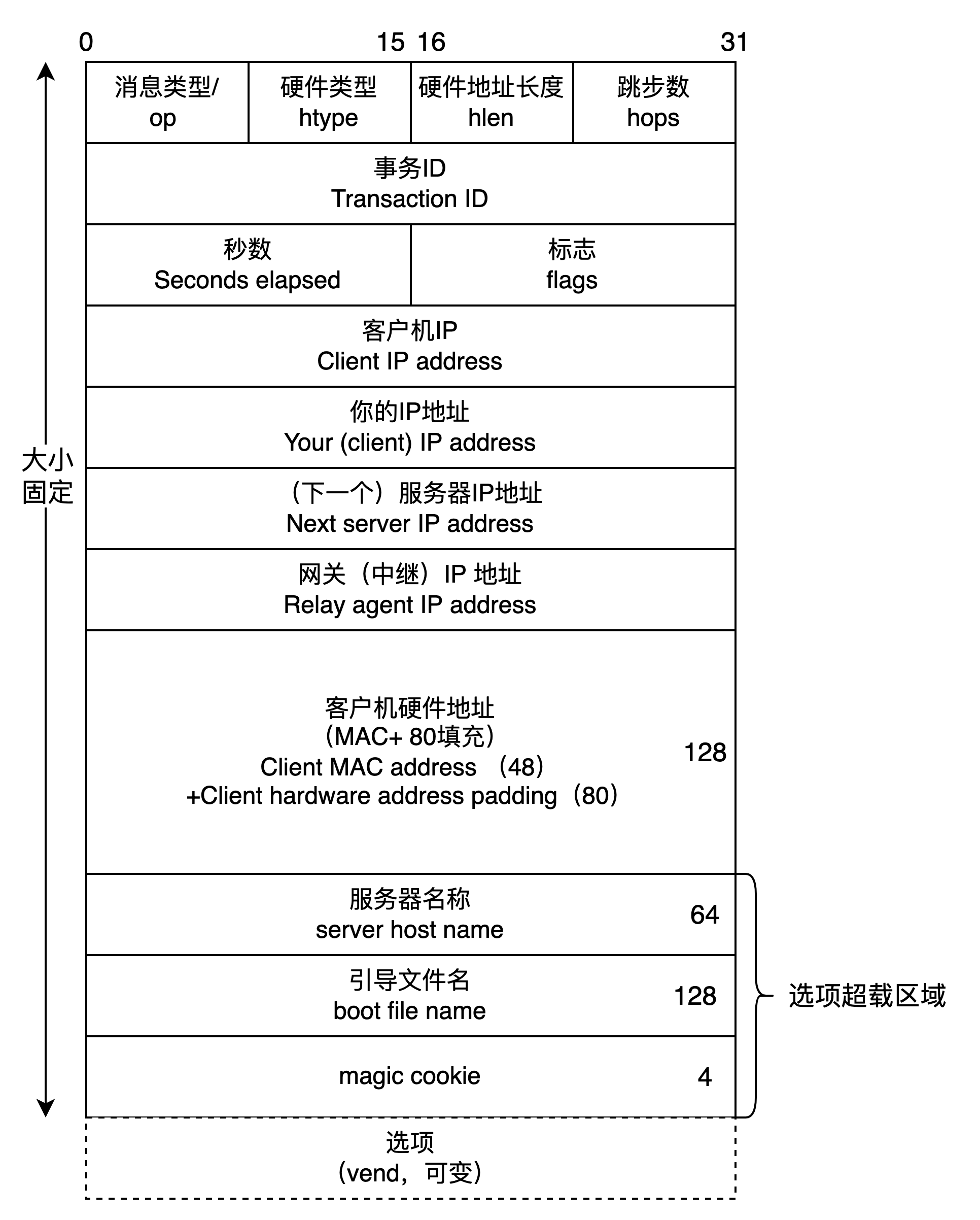
Analysis of DHCP dynamic host setting protocol
随机推荐
Getting started with cinnamon applet
MongoDB优化的几点原则
解决缓存击穿问题
Pay close attention to the work of safety production and make every effort to ensure the safety of people's lives and property
为租客提供帮助
leecode3. 无重复字符的最长子串
一文读懂数仓中的pg_stat
xshell连接服务器把密钥登陆改为密码登陆
How to make join run faster?
Centso7 OpenSSL error Verify return code: 20 (unable to get local issuer certificate)
OSI seven layer model
LED light of single chip microcomputer learning notes
Some principles of mongodb optimization
User management summary of mongodb
靠卖概念上市,认养一头牛能走多远?
如何让join跑得更快?
Realbasicvsr test pictures and videos
[untitled]
【学习笔记】zkw 线段树
MongoDB命令汇总