当前位置:网站首页>Pandora IOT development board learning (HAL Library) - Experiment 7 window watchdog experiment (learning notes)
Pandora IOT development board learning (HAL Library) - Experiment 7 window watchdog experiment (learning notes)
2022-07-05 13:00:00 【Xiaohui_ Super】
This code refers to the punctual atomic routine
List of articles
The reason why it is called window is that its dog feeding time is a range with upper and lower limits ( window ), You can set the relevant registers , Set its upper limit time ( The lower limit is fixed ). You can't feed the dog too early or too late .
Experimental function
main.c Only peripheral initialization code , The dog feeding code is placed in the watchdog interrupt . The window watchdog interrupts and barks “ Wake up ahead interrupt ”, When the down counter is equal to the lower limit of the window (0x40) when , Trigger a “ Wake up ahead interrupt (EWI).
If not in interruption “ feed a dog ”,LED_R Will keep flashing , It shows that the MCU is always reset .
Routine source code :(main.c)
#include "sys.h"
#include "usart.h"
#include "delay.h"
#include "led.h"
#include "wwdg.h"
/********************************************************************************* ___ _ _____ _____ _ _ _____ _____ _ __ / _ \ | | |_ _|| ___|| \ | ||_ _|| ___|| | / / / /_\ \| | | | | |__ | \| | | | | |__ | |/ / | _ || | | | | __| | . ` | | | | __| | \ | | | || |_____| |_ | |___ | |\ | | | | |___ | |\ \ \_| |_/\_____/\___/ \____/ \_| \_/ \_/ \____/ \_| \_/ * ****************************************************************************** * The punctual atoms Pandora STM32L475 IoT Development board experiment 7 * Window watchdog experiment HAL Library version * Technical support :www.openedv.com * Taobao shop :http://openedv.taobao.com * Focus on wechat public platform wechat :" The punctual atoms ", Free access STM32 Information . * Guangzhou Xingyi Electronic Technology Co., Ltd * author : The punctual atoms @ALIENTEK * ******************************************************************************/
int main(void)
{
HAL_Init();
SystemClock_Config(); // Initialize the system clock to 80M
delay_init(80); // Initialization delay function 80M The system clock
uart_init(115200); // Initialize serial port , The baud rate is 115200
LED_Init(); // initialization LED
LED_R(0);
delay_ms(300); // Time delay 300ms Then initialize the watchdog ,LED_R The change of " so "
WWDG_Init(0X7F, 0X5F, WWDG_PRESCALER_8); // The counter value is 7F, The window register is 5F, The frequency division number is 8
while(1)
{
LED_R(1); // Extinguish LED_R The lamp
}
}
Code analysis
HAL_Init()
HAL_Init() The definition is as follows :( See notes for specific functions )
HAL_StatusTypeDef HAL_Init(void)
{
HAL_StatusTypeDef status = HAL_OK;
/* To configure Flash Prefetch , Instruction cache , Data caching */
/* Default configuration is : Pre access is closed Instruction cache and data cache are enabled */
#if (INSTRUCTION_CACHE_ENABLE == 0) // Flash Enable pre access configuration , Can accelerate CPU Execution of code
__HAL_FLASH_INSTRUCTION_CACHE_DISABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE == 0)
__HAL_FLASH_DATA_CACHE_DISABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_2); // To configure NVIC Priority groups
/* Use SysTick as time base source and configure 1ms tick (default clock after Reset is MSI) */
if (HAL_InitTick(TICK_INT_PRIORITY) != HAL_OK) // Initialize tick timer , The clock beat is set to 1ms
{
status = HAL_ERROR;
}
else
{
/* Init the low level hardware */
HAL_MspInit(); // Low speed peripheral initialization , such as GPIO、 Interrupt, etc ( Use STM32CubeMx Low speed peripherals are initialized when generating code
// The code is in this kind of function , In other cases, this function can be ignored
}
/* Return function status */
return status;
}
HAL_InitTick()
Tick timer clock beat initialization function
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
HAL_StatusTypeDef status = HAL_OK;
/*Configure the SysTick to have interrupt in 1ms time basis*/
if (HAL_SYSTICK_Config(SystemCoreClock/1000UL) != 0U) // The system clock /1000, The interruption period is 1ms
{
status = HAL_ERROR;
}
else
{
/*Configure the SysTick IRQ priority */
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0); // Set the interrupt priority of the tick timer to the highest
}
/* Return function status */
return status;
}
SystemClock_Config()
SystemClock_Config() The function is defined as follows :( See notes for specific functions , For reference only )
void SystemClock_Config(void)
{
HAL_StatusTypeDef ret = HAL_OK;
RCC_OscInitTypeDef RCC_OscInitStruct; // Define oscillator initialization structure variables
RCC_ClkInitTypeDef RCC_ClkInitStruct; // Define clock initialization structure variables
__HAL_RCC_PWR_CLK_ENABLE(); // Enable power control clock
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // take HSE( External high-speed clock ) As a clock source
RCC_OscInitStruct.HSEState = RCC_HSE_ON; // Turn on HSE
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; // Turn on PLL( PLL )
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; // take HSE As PLL The clock source of
RCC_OscInitStruct.PLL.PLLM = 1; // PLL-VCO Input clock frequency division coefficient ,1 Express 2 frequency division (8 / 2 = 4M, The external crystal oscillator frequency of the development board is 8MHz)
RCC_OscInitStruct.PLL.PLLN = 20; // PLL-VCO Output clock frequency multiplication coefficient ,4 * 20 = 80M, That is, the output clock frequency is 80MHz
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7; // SAI Frequency division coefficient of clock
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2; // SDMMC1, RNG and USB Clock frequency division coefficient
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2; // Frequency division coefficient of the main system clock
ret = HAL_RCC_OscConfig(&RCC_OscInitStruct); // Initialize clock configuration
if(ret != HAL_OK) while(1);
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; // Configure all clocks at the same time
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // take PLL As the clock source of the system
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB Regardless of the frequency
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; // APB1 Regardless of the frequency
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // APB2 Regardless of the frequency
ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4); // Configure the initial structure variable of the clock ,
// Use Flash Delay 4, Wait state ( Delay ) The quantity of should be according to CPU The clock (HCLK) Frequency and internal voltage range , How to
// Please refer to the chip manual
if(ret != HAL_OK) while(1);
/*Configure the main internal regulator output voltage*/
ret = HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1); // Internal register output voltage configuration
// Here is HAL_PWREx_ControlVoltageScaling() Part of the function description :
//PWR_REGULATOR_VOLTAGE_SCALE1 Regulator voltage output range 1 mode, typical output voltage
// at 1.2 V, system frequency up to 80 MHz.
if(ret != HAL_OK) while(1);
}
delay_init()
The tick timer is already HAL_Init() Initialization in , The following function is actually for fac_us Given a value ( At present, the operating system is not involved , Other code will not be studied for the time being ).
static u32 fac_us = 0; //us Delay multiplier
/** * @brief Initialization delay function ,SYSTICK The clock is fixed to AHB The clock * * @param SYSCLK System clock frequency * * @return void */
void delay_init(u8 SYSCLK)
{
#if SYSTEM_SUPPORT_OS // If support is needed OS.
u32 reload;
#endif
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick The frequency is HCLK
fac_us = SYSCLK; // Whether used or not OS,fac_us You need to use
#if SYSTEM_SUPPORT_OS // If support is needed OS.
reload = SYSCLK; // The number of counts per second Unit is K
reload *= 1000000 / delay_ostickspersec; // according to delay_ostickspersec Set the overflow time
//reload by 24 Bit register , Maximum :16777216, stay 80M Next , about 209.7ms about
fac_ms = 1000 / delay_ostickspersec; // representative OS The minimum unit that can delay
SysTick->CTRL |= SysTick_CTRL_TICKINT_Msk; // Turn on SYSTICK interrupt
SysTick->LOAD = reload; // Every time 1/OS_TICKS_PER_SEC Second break once
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk; // Turn on SYSTICK
#else
#endif
}
LED_Init()
/** * @brief LED IO Initialization function * * @param void * * @return void */
void LED_Init(void)
{
/* LED-B PE9 LED-G PE8 LED-R PE7 */
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOE_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_7 | GPIO_PIN_8 | GPIO_PIN_9, GPIO_PIN_SET);
}
LED Operation function
LED The control function of is a macro function , We used HAL_GPIO_WritePin() and HAL_GPIO_TogglePin() Two library functions .
//RGB Interface definition
#define LED_R(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_RESET))
#define LED_R_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_7) //LED_R Level flip
#define LED_G(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_RESET))
#define LED_G_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_8) //LED_G Level flip
#define LED_B(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_9,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_9,GPIO_PIN_RESET))
#define LED_B_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_9) //LED_B Level flip
delay_ms()
delay_ms() What runs in the is delay_us(), delay_us() Delay by ticking timer . above delay_init() Have already put fac_us Set up in order to 80, Tick timer counts 80 Time required 10-6 second ( The system clock is 80MHz), namely 1us.
/** * @brief Delay milliseconds (ms) function * * @param nms How many milliseconds does it take * * @return void */
void delay_ms(u16 nms)
{
u32 i;
for(i = 0; i < nms; i++) delay_us(1000);
}
/** * @brief Delay microseconds (us) function * * @remark nus:0~190887435( The maximum value is 2^32/[email protected]_us=22.5) * * @param nus How many microseconds do you need to delay * * @return void */
void delay_us(u32 nus)
{
u32 ticks;
u32 told, tnow, tcnt = 0;
u32 reload = SysTick->LOAD; //LOAD Value
ticks = nus * fac_us; // The number of beats needed
told = SysTick->VAL; // Counter value at the time of first entry
while(1)
{
tnow = SysTick->VAL;
if(tnow != told)
{
if(tnow < told)tcnt += told - tnow; // Notice here SYSTICK It's a decreasing counter .
else tcnt += reload - tnow + told;
told = tnow;
if(tcnt >= ticks)break; // For more than / Equal to the time to delay , The exit .
}
}
}
WWDG_Init()
Window watchdog initialization function ,main() Function , The parameters of this function are : Counter value 0X7F( The count value should be greater than the window value , It's a 7bit data ), Window value 0x5F( The acceptable range of window value is 0X40~0X7F), Division coefficient WWDG_PRESCALER_8( The corresponding value is 3). The window here refers to the upper window , The lower window is fixed as 0X40.
According to the time calculation formula of the window watchdog ( See the picture below ), Combined with the above parameters , It can be calculated that the watchdog timeout of this experiment is 4096*23*(63+1)]/48000=43.69ms

- PCLK yes APB1 The clock frequency of (48MHz), In the formula is time , And need to be converted to ms, So the corresponding value is 1/48000,
- WDGTB Is the frequency division coefficient (0~3),
- T[5:0] Is the low of the counter 6 position ,
There is one caveat here , The reason for taking the low of the counter 6 position , Because 0X7F-0X40=0x3F(111111), namely “ Count value - Window lower limit ” The maximum time difference is 0X3F, and 0X40~0X7F Of the 7 Bit is always 1, So take the low directly 6 position , Namely “ Count value - Window lower limit ” Time difference .
WWDG_Handler.Init.EWIMode = WWDG_EWI_DISABLE;I don't understand this industry for the time being , close EWI Pattern , The early wake-up interrupt will still trigger .
/** * @brief Initialize the window watchdog * * @param tr T[6:0], Counter value * @param wr W[6:0], Window value * @param fprer Division coefficient (WDGTB), Only the lowest 2 Bit effective * * @return void */
void WWDG_Init(u8 tr, u8 wr, u32 fprer)
{
WWDG_Handler.Instance = WWDG;
WWDG_Handler.Init.Prescaler = fprer; // Set the frequency division coefficient
WWDG_Handler.Init.Window = wr; // Set window values
WWDG_Handler.Init.Counter = tr; // Set counter value
WWDG_Handler.Init.EWIMode = WWDG_EWI_DISABLE;
HAL_WWDG_Init(&WWDG_Handler); // initialization WWDG
__HAL_WWDG_ENABLE_IT(&WWDG_Handler, WWDG_IT_EWI); // Turn on wake-up interrupt
}
The following function is the bottom driver initialization function of the window watchdog ,HAL The library will automatically call this function .
/** * @brief WWDG Bottom drive , Clock configuration , Interrupt configuration * This function will be HAL_WWDG_Init() call * * @param hwwdg Window watchdog handle * * @return void */
void HAL_WWDG_MspInit(WWDG_HandleTypeDef *hwwdg)
{
__HAL_RCC_WWDG_CLK_ENABLE(); // Enable the window watchdog clock
HAL_NVIC_SetPriority(WWDG_IRQn, 2, 3); // preemption 2, The sub priority is 3
HAL_NVIC_EnableIRQ(WWDG_IRQn); // Enable window watchdog interrupt
}
Interrupt service function
Call... In the underlying interrupt service function HAL Interrupt service function of Library .
/** * @brief Window watchdog interrupt service function * * @param void * * @return void */
void WWDG_IRQHandler(void)
{
HAL_WWDG_IRQHandler(&WWDG_Handler);// call WWDG Common interrupt handling function
}
HAL_WWDG_IRQHandler() Some interrupt callback functions will be run in , Among them is HAL_WWDG_EarlyWakeupCallback() Wake up interrupt callback function in advance , In this function , Mainly completed the operation of feeding dogs .
When the count is equal to 0X40 ( Window lower limit ) when , The system will trigger the early wake-up interrupt .
/** * @brief Interrupt service function processing * This function will be HAL_WWDG_IRQHandler() call * * @param hwwdg Window watchdog handle * * @return void */
void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef* hwwdg)
{
HAL_WWDG_Refresh(&WWDG_Handler);// Update window watchdog value
LED_B_TogglePin;
}
The dog feeding operation is actually to refill the count of the window watchdog .
/** * @brief Refresh the WWDG. * @param hwwdg pointer to a WWDG_HandleTypeDef structure that contains * the configuration information for the specified WWDG module. * @retval HAL status */
HAL_StatusTypeDef HAL_WWDG_Refresh(WWDG_HandleTypeDef *hwwdg)
{
/* Write to WWDG CR the WWDG Counter value to refresh with */
WRITE_REG(hwwdg->Instance->CR, (hwwdg->Init.Counter));
/* Return function status */
return HAL_OK;
}
边栏推荐
- 《2022年中国银行业RPA供应商实力矩阵分析》研究报告正式启动
- Research: data security tools cannot resist blackmail software in 60% of cases
- CF:A. The Third Three Number Problem【关于我是位运算垃圾这个事情】
- Overflow toolbar control in SAP ui5 view
- 深度长文探讨Join运算的简化和提速
- 我在滴滴做开源
- 946. Verify stack sequence
- Setting up sqli lab environment
- 《信息系统项目管理师》备考笔记---信息化知识
- 研究:数据安全工具在 60% 的情况下无法抵御勒索软件
猜你喜欢
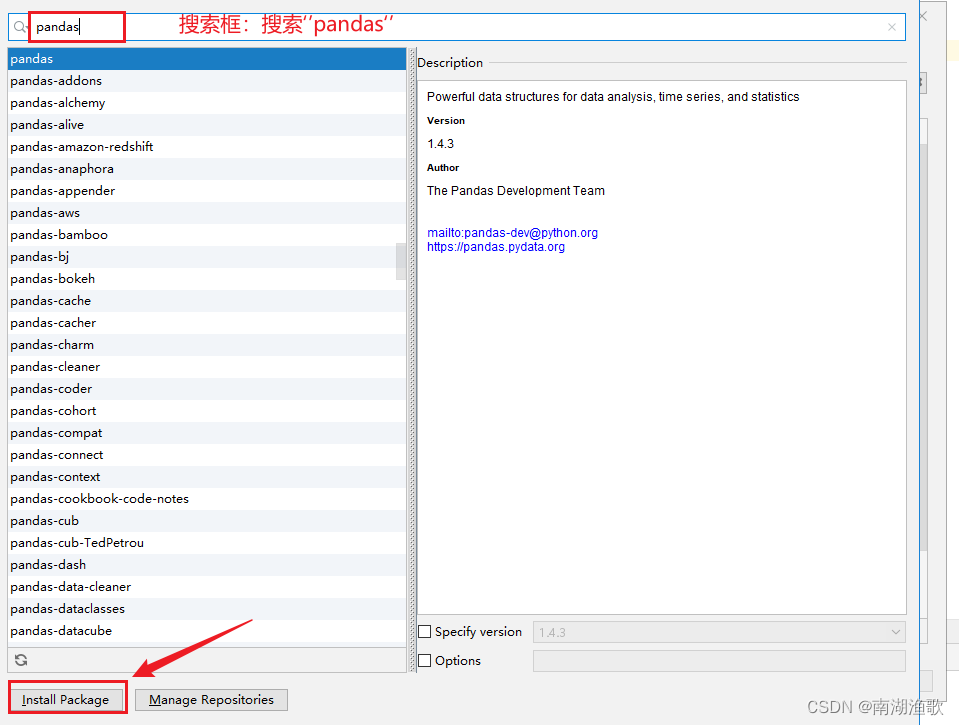
PyCharm安装第三方库图解

Install rhel8.2 virtual machine
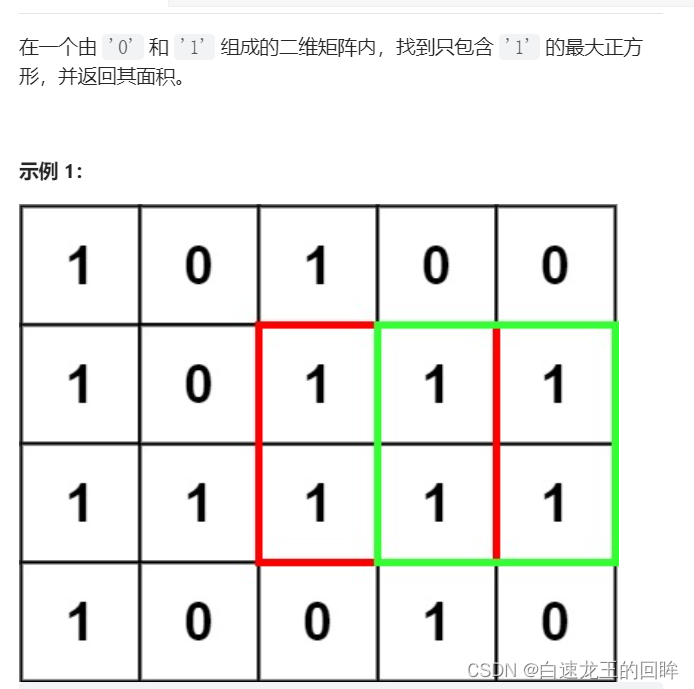
leetcode:221. 最大正方形【dp状态转移的精髓】
Super efficient! The secret of swagger Yapi
I'm doing open source in Didi

Taobao short video, why the worse the effect
![[Nacos cloud native] the first step of reading the source code is to start Nacos locally](/img/f8/d9b848593cf7380a6c99ee0a8158f8.png)
[Nacos cloud native] the first step of reading the source code is to start Nacos locally
关于 SAP UI5 getSAPLogonLanguage is not a function 的错误消息以及 API 版本的讨论

Talk about my drawing skills in my writing career

Taobao flag insertion remarks | logistics delivery interface
随机推荐
MySQL 巨坑:update 更新慎用影响行数做判断!!!
How do e-commerce sellers refund in batches?
Taobao short videos are automatically released in batches without manual RPA open source
以VMware创新之道,重塑多云产品力
RHCAS6
NLP engineer learning summary and index
OPPO小布推出预训练大模型OBERT,晋升KgCLUE榜首
[cloud native] event publishing and subscription in Nacos -- observer mode
Simply take stock reading notes (4/8)
DNS的原理介绍
A small talk caused by the increase of sweeping
Introduction aux contrôles de la page dynamique SAP ui5
Reshape the power of multi cloud products with VMware innovation
#yyds干货盘点# 解决名企真题:搬圆桌
RHCSA2
LeetCode20.有效的括号
SAP UI5 DynamicPage 控件介绍
逆波兰表达式
PyCharm安装第三方库图解
VoneDAO破解组织发展效能难题