当前位置:网站首页>ECCV2022 Workshop | Multi-Object Tracking and Segmentation in Complex Environments
ECCV2022 Workshop | Multi-Object Tracking and Segmentation in Complex Environments
2022-08-01 00:43:00 【3D Vision Workshop】
点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

来源丨CVer
This article mainly introduces what we will be inECCV2022举办的workshop:Multi-object tracking and segmentation in complex environments
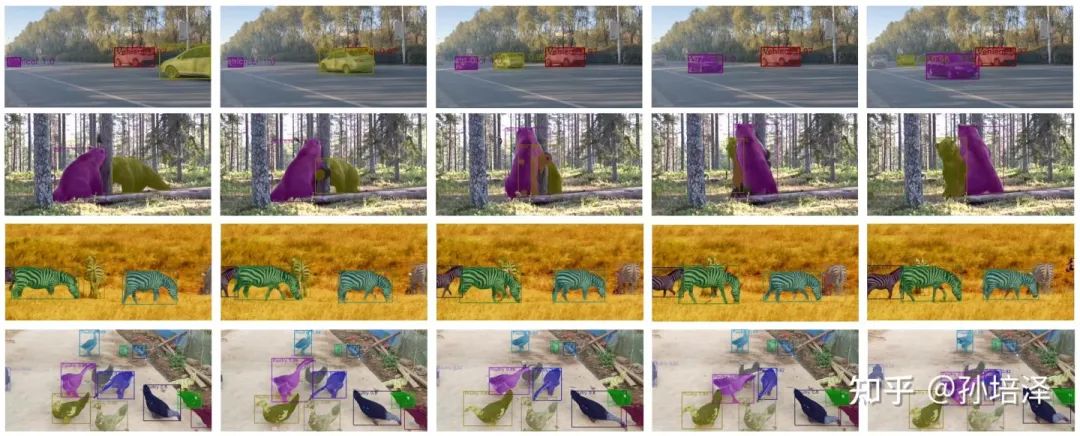
The multi-object tracking and segmentation task is to locate and associate objects of interest in videos,It's city surveillance、公共安全、Fundamental technology in many practical applications such as video content understanding and human-computer interaction.Existing computer vision systems achieve good tracking and segmentation performance in simple scenes,例如 MOT 数据集和 DAVIS 数据集,However, it performs well in complex environments,Far inferior to the performance of the human visual system.
To facilitate the performance of current computer vision systems in complex environments,我们的workshopFour challenging scenarios for multi-object tracking and segmentation are explored:(1) 长视频 (2) Occlude objects (3) 复杂运动 (4) 开放世界,Four corresponding competitions were held simultaneously:
- 第四届 YouTubeVIS Long Video Instance Segmentation Challenge (4th YouTubeVIS and Long Video Instance Segmentation Challenge)
- 第二届 OVIS Occlusion Video Instance Segmentation Challenge (2nd Occluded Video Instance Segmentation Challenge)
- 第一届 DanceTrack Group Dance Multiplayer Track Challenge (1st Multiple People Tracking in Group Dance Challenge)
- 第二届 UVO Open World Video Object Detection and Segmentation Challenge (2nd Open-World Video Object Detection and Segmentation Challenge)
Everyone is welcome to follow and participate in the competition !
主页:Multiple Object Tracking and Segmentation in Complex Environments
https://motcomplex.github.io/
比赛时间:2022年7月1日-10月1日
workshop时间:2022年10月23/24日 (在线workshop)
We will announce the final rankings for each challenge after the competition closes,并在workshopawards at the time,Invite top-ranked teams to share solutions.同时,We have invited a number of heavyweight guests in the field of multi-target trackingworkshoptime to sharetalk,敬请期待!
1. 第四届 YouTubeVIS Long Video Instance Segmentation Challenge
视频实例分割 (Video Instance Segmentation, VIS) is to extend the task of instance segmentation from images to videos.This task not only requires the model to output instance segmentation results for each frame of the video,And the same instance needs to be associated between different frames.In this competition, we extended long videos for validation and testing on the basis of previous datasets,In order to encourage participating teams to pay more attention to the correlation performance of the model rather than the instance segmentation performance of a single frame.

数据集下载:https://
https://codalab.lisn.upsaclay.fr/competitions/5902#participate
比赛服务器:
https://codalab.lisn.upsaclay.fr/competitions/5902
2. 第二届 OVIS Occlusion Video Instance Segmentation Challenge
遮挡视频实例分割 (Occluded Video Instance Segmentation, OVIS) It is a very difficult scene in video instance segmentation,It is also one of the reasons why video tasks have attracted attention,Because solving occlusions in video is a much more well-defined problem than in single-frame images.同时,Video instance segmentation compared to ordinary scenes,Reappearance after the disappearance of occluded objects places higher requirements on the long-range correlation ability of the tracking model.
数据集下载:
https://codalab.lisn.upsaclay.fr/competitions/5857#participate-get-data
比赛服务器:
https://codalab.lisn.upsaclay.fr/competitions/5857
3. 第一届 DanceTrack Group Dance Multiplayer Track Challenge
group dance (DanceTrack) It is a scene with obvious characteristics in multi-target tracking.in group dance,The dancers are uniformly dressed,外观高度相似,同时,Dancers have complex movement patterns,Relative positions are frequently exchanged.These features are now widely popular based on appearance(re-ID)and linear motion models(Kalman Filter)tracking model challenges.

数据集下载:
https://https://github.com/DanceTrack/DanceTrack
比赛服务器:
https://codalab.lisn.upsaclay.fr/competitions/5832
4. 第二届 UVO Open World Video Object Detection and Segmentation Challenge
Open world video target(Unidentified Video Objects, UVO)The task is to detect and segment all objects present in an image or video,Whether its semantic concept is known or unknown.Open-world perception is an important ability that distinguishes humans from existing computer vision models.In this competition, we expanded the data scale on the basis of the previous data set,We look forward to further advancing the model's open-world perception capabilities.

数据集下载:
https://sites.google.com/view/unidentified-video-object/dataset?authuser=0
比赛服务器:https://
https://sites.google.com/view/unidentified-video-object/dataset?authuser=0
Due to time, energy and organizational limitations,我们这次workshop没有向ECCVThe organizing committee applies to accept submissions,非常遗憾.We sincerely invite interested teams to contact us hereworkshop中直接进行talk分享.We plan with all after the meetingtalk嘉宾,Participating winning teams,An organizer's collaborationtechnical report,欢迎届时关注.
本文仅做学术分享,如有侵权,请联系删文.
3D视觉工坊精品课程官网:3dcver.com
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜.
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群.
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“.请按照格式备注,可快速被通过且邀请进群.原创投稿也请联系.

▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导.与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~
边栏推荐
猜你喜欢
MYSQL二阶段提交

TFC CTF 2022 WEB Diamand WriteUp
VPGNet
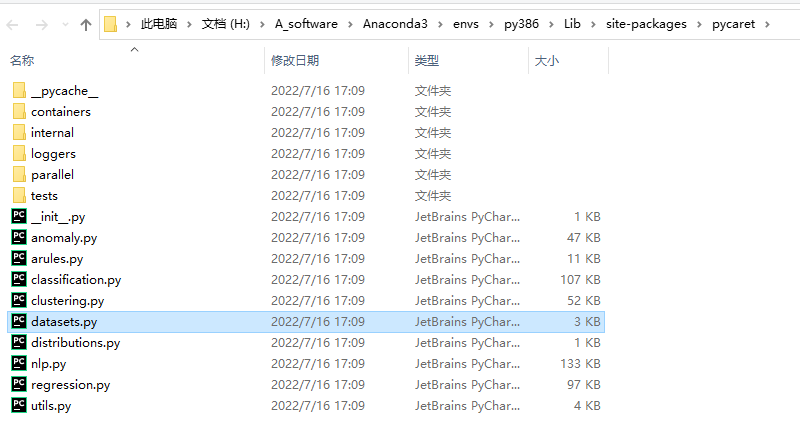
pycaret source code analysis: download dataset\Lib\site-packages\pycaret\datasets.py
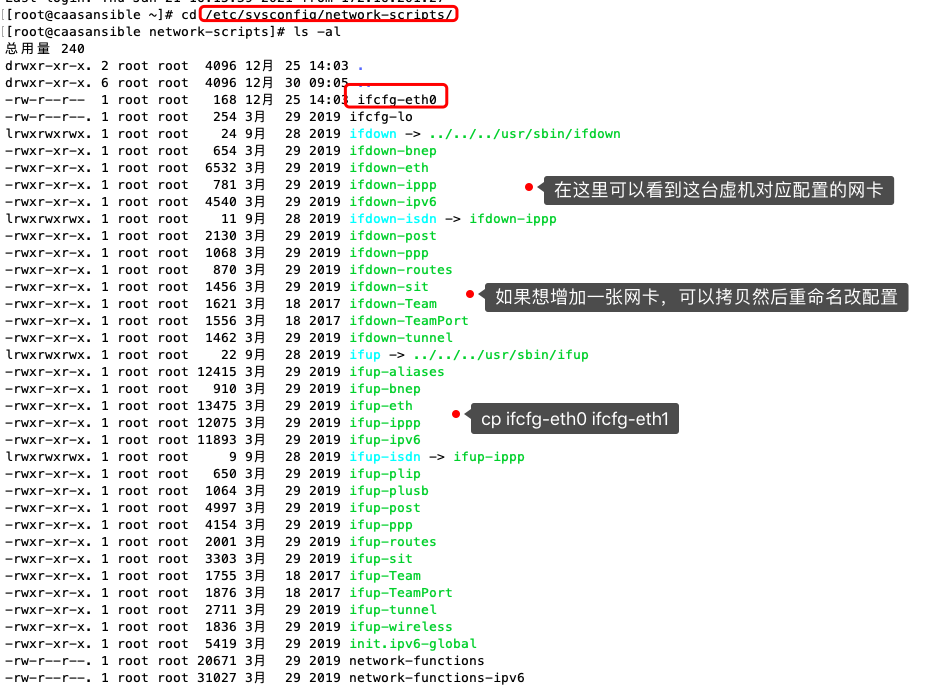
/etc/sysconfig/network-scripts configure the network card
声称AI存在意识,谷歌工程师遭解雇:违反保密协议

清华大学陈建宇教授团队 | 基于接触丰富机器人操作的接触安全强化学习框架
RTL8762DK PWM(七)

Redis五种数据类型简介
![[AMEX] LGBM Optuna American Express Credit Card Fraud Contest kaggle](/img/64/55af53a3d9dc1162490d613fe8a436.png)
[AMEX] LGBM Optuna American Express Credit Card Fraud Contest kaggle
随机推荐
两院院士直言:不要迷信院士
RTL8762DK WDG(六)
Web3.0:构建 NFT 市场(一)
Interview Question: Implementing Deadlocks
Binary tree traversal non-recursive program -- using stack to simulate system stack
Interview Blitz 69: Is TCP Reliable?Why?
TFC CTF 2022 WEB Diamand WriteUp
LeetCode--The problem of robbery
LeetCode--打家劫舍问题
IPD流程专业术语
/etc/sysconfig/network-scripts 配置网卡
力扣2326、197
Compose原理-视图和数据双向绑定的原理
C字符串数组反转
Exam preparation plan
mysql having的用法
对象缓存服务的思考和实现
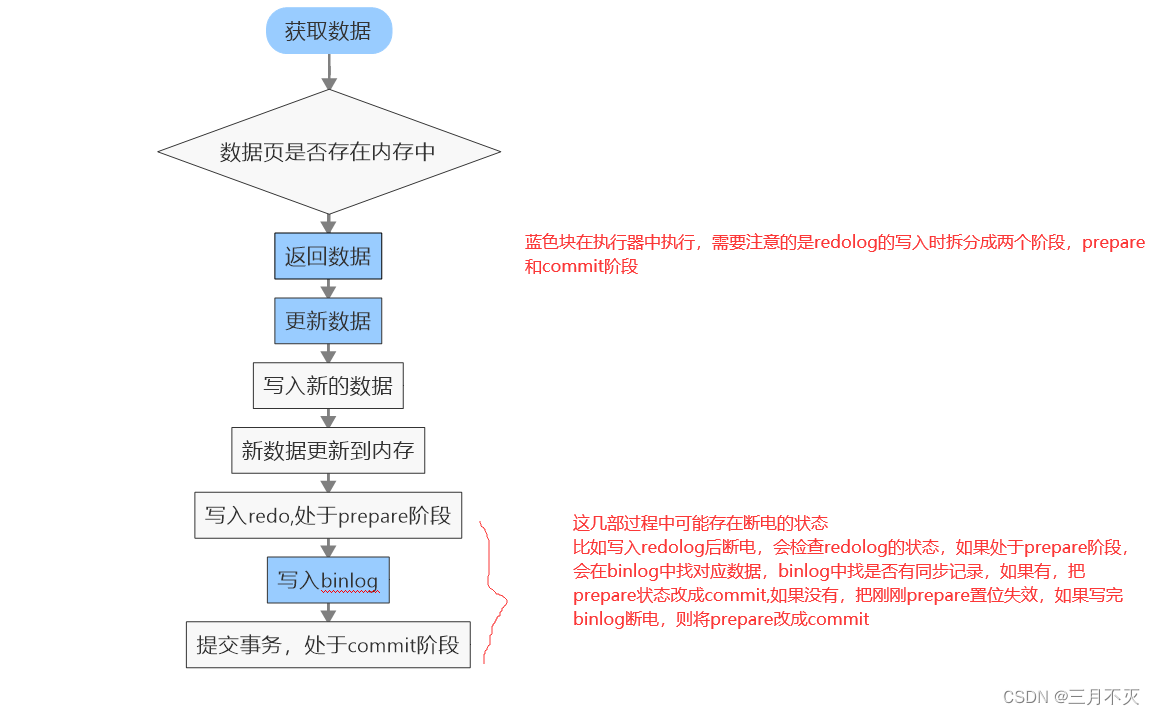
MYSQL事务
Web3.0: Building an NFT Market (1)
/usr/local/bin和/usr/bin的区别