当前位置:网站首页>Minimum spanning tree
Minimum spanning tree
2022-07-02 22:59:00 【Ancient road】
Minimum spanning tree Minimum Spanning Tree
0. Build the minimum spanning tree
To give you one points Array , Express 2D Some points on the plane , among points[i] = [xi, yi] .
Connection point [xi, yi] Sum point [xj, yj] The cost is between them Manhattan distance :|xi - xj| + |yi - yj| , among |val| Express val The absolute value of .
Please return the minimum total cost of connecting all points . Just between any two points Yes and no A simple path , All the points are connected .
Example 1:

Input :points = [[0,0],[2,2],[3,10],[5,2],[7,0]]
Output :20

explain :
We can connect all the points as shown in the figure above to get the minimum total cost , The total cost is 20 .
Notice that there is only one path between any two points to reach each other .
Example 2:
Input :points = [[3,12],[-2,5],[-4,1]]
Output :18
Example 3:
Input :points = [[0,0],[1,1],[1,0],[-1,1]]
Output :4
Example 4:
Input :points = [[-1000000,-1000000],[1000000,1000000]]
Output :4000000
Example 5:
Input :points = [[0,0]]
Output :0
1.Kruskal Algorithm
Kruskal Algorithm ideas :
- Sort each edge according to the weight from small to large
- Add edges in turn
- Judge whether the newly added edge is looped by using the union search set

/* * @Date: 2022-06-30 * @Author: bFeng */
/* * @lc app=leetcode.cn id=1584 lang=cpp * * [1584] The minimum cost of connecting all points */
// @lc code=start
class UnionFind {
public:
UnionFind(int n) {
count_ = n;
parent_.resize(n);
for (int i = 0; i < n; ++i) {
parent_[i] = i; // Be your own parent node
}
}
// and
void Union(int point1, int point2) {
int f1 = Find(point1);
int f2 = Find(point2);
if (f1 == f2) return; // The root node is the same , It is already in a picture
parent_[f1] = f2; // f1(point1 The ancestors of the ) The parent of is set to f2(point2 The ancestors of the )
}
// check
// int Find(int point) {
// // If the parent node is not itself , Then go all the way up to find the root node
// while (parent_[point] != point) {
// parent_[point] = parent_[parent_[point]];
// point = parent_[point];
// }
// return parent_[point];
// }
// check recursive
// int Find(int point) {
// if (parent_[point] == point)
// return point;
// else
// return find(parent_[point]);
// }
// If the root node is the same , Is connected
// check recursive
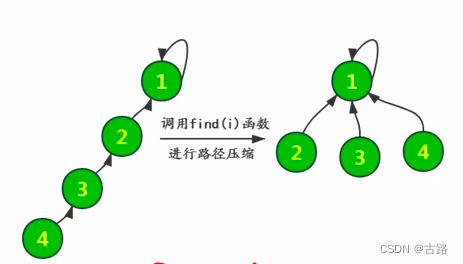
int Find(int i) {
if (parent_[i] == i)
return i;
else {
// Path compression
parent_[i] = Find(parent_[i]);
return parent_[i];
}
}
// If the root node is the same , Is connected
bool Connected(int point1, int point2) {
return Find(point1) == Find(point2);
}
private:
int count_;
std::vector<int> parent_;
};
struct Edge {
int p1_;
int p2_;
int manhattan_;
Edge(int p1, int p2, int manhattan)
: p1_(p1), p2_(p2), manhattan_(manhattan) {
}
};
class Solution {
public:
int minCostConnectPoints(vector<vector<int>>& points) {
int points_size = points.size();
UnionFind union_find(points_size);
std::vector<Edge> edges;
for (int i = 0; i < points_size; ++i) {
for (int j = i + 1; j < points_size; ++j) {
int i_x = points[i][0];
int i_y = points[i][1];
int j_x = points[j][0];
int j_y = points[j][1];
int manhattan = std::abs(i_x - j_x) + std::abs(i_y - j_y);
edges.emplace_back(i, j, manhattan);
}
}
// If it is the largest spanning tree , Take this ‘<’ Change it to ‘>’ that will do
std::sort(edges.begin(), edges.end(),
[&](Edge& a, Edge& b) {
return a.manhattan_ < b.manhattan_; });
int res_mst = 0;
// Greedy choice
for (auto edge : edges) {
int point1 = edge.p1_;
int point2 = edge.p2_;
int distance = edge.manhattan_;
if (union_find.Connected(point1, point2)) continue;
res_mst += distance;
union_find.Union(point1, point2);
}
return res_mst;
}
};
// @lc code=end
- Kruskal The algorithm takes edges as cells , Time O ( m l o g ( m ) ) O(m log(m)) O(mlog(m)) Mainly depends on the number of sides , It is more suitable for sparse graphs .
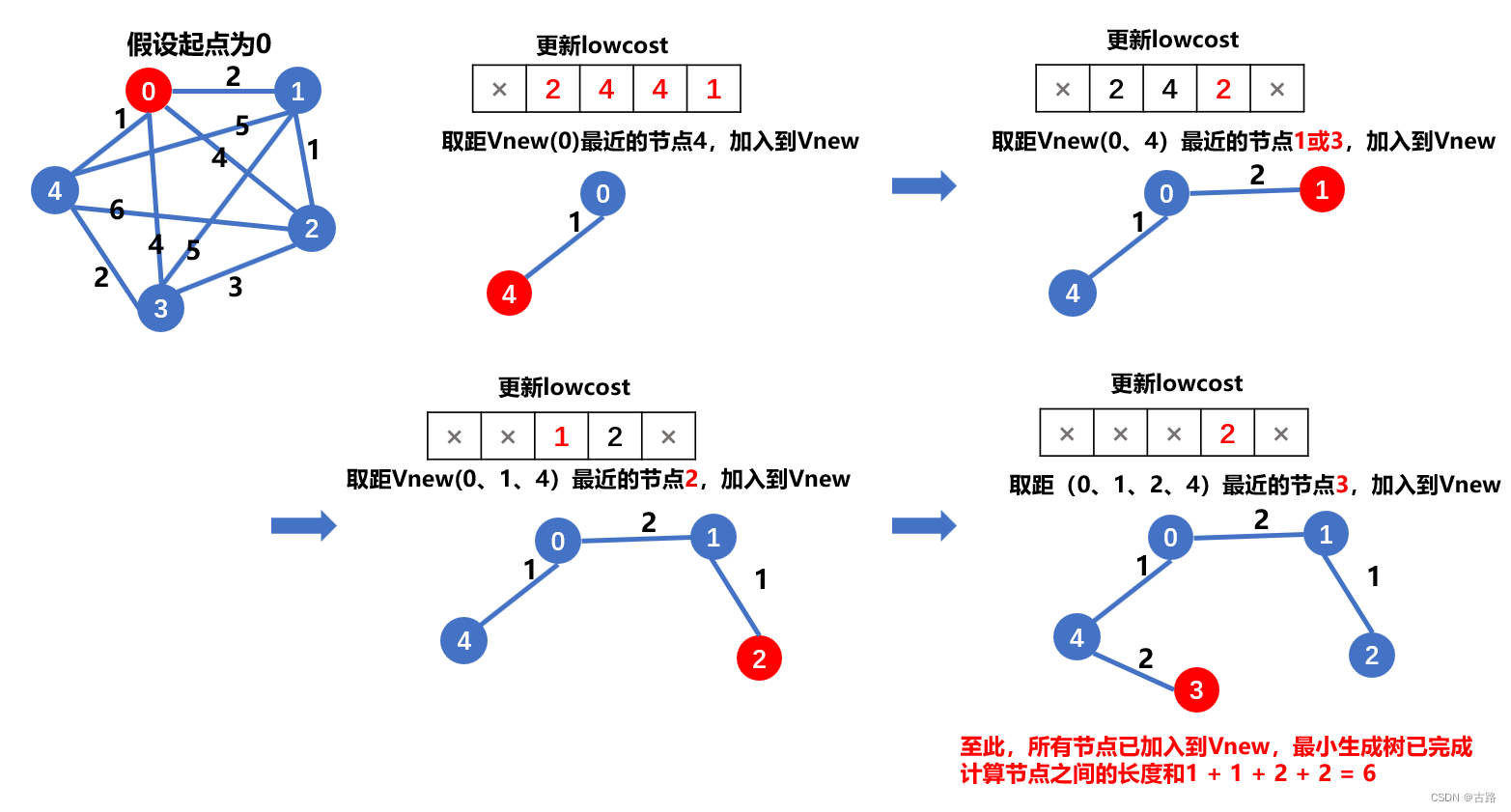
2.Prim Algorithm
prim The algorithm is actually BFS thought .
/* * @Date: 2022-06-30 * @Author: bFeng */
/* * @lc app=leetcode.cn id=1584 lang=cpp * * [1584] The minimum cost of connecting all points */
// @lc code=start
struct Edge {
int p1_;
int p2_;
int manhattan_;
Edge(int p1, int p2, int manhattan)
: p1_(p1), p2_(p2), manhattan_(manhattan) {
}
};
// Pay attention to the priority queue class Compare = std::less<typename Container::value_type>
// less Time is the largest heap
// To build the largest spanning tree , Put the ‘>’ Change it to '<'
struct Cmp {
bool operator()(Edge& a, Edge& b) {
return a.manhattan_ > b.manhattan_; }
};
class Solution {
public:
int minCostConnectPoints(vector<vector<int>>& points) {
int points_size = points.size(); // Example 1: points_size = 5
visited_.resize(points_size);
// From top to bottom , From left to right Number nodes 0 1 2 3 4
// Adjacency list
// graph[0]: (p1, w01),(p2, w02),(p3, w03),(p4, w04)
// graph[1]: (p2, w12),(p3, w13),(p4, w14)
// graph[2]: (p3, w23),(p4, w24)
// graph[3]: (p4, w34)
// graph[4]:
std::vector<std::vector<pair<int, int>>> graph(points_size);
for (int i = 0; i < points_size; ++i) {
for (int j = i + 1; j < points_size; ++j) {
int i_x = points[i][0];
int i_y = points[i][1];
int j_x = points[j][0];
int j_y = points[j][1];
int manhattan = std::abs(i_x - j_x) + std::abs(i_y - j_y);
graph[i].push_back({
j, manhattan});
graph[j].push_back({
i, manhattan});
}
}
int res_mst = 0;
visited_[0] = true;
cut(0, graph);
// Greedy choice
while(!edge_queue_.empty()) {
// Take out the edge with the lowest weight in this list
Edge edge = edge_queue_.top();
edge_queue_.pop();
int to_point = edge.p2_;
int weight = edge.manhattan_;
if (visited_[to_point]) continue;
res_mst += weight;
visited_[to_point] = true;
// BFS
cut(to_point, graph);
}
return res_mst;
}
private:
std::priority_queue<Edge, std::vector<Edge>, Cmp> edge_queue_; //
std::vector<bool> visited_ = {
false};
void cut(int point, std::vector<std::vector<std::pair<int,int>>>& graph) {
for (auto& p : graph[point]) {
// Traverse a table , Build edges and sort
int to_point = p.first;
int weight = p.second;
if (visited_[to_point]) continue;
edge_queue_.push({
point, to_point, weight});
}
}
};
Pay attention to the priority queue cmp , A little counter intuitive .
- Time complexity O ( n 2 ) O(n^2) O(n2), Suitable for dense map
边栏推荐
- 电路设计者常用的学习网站
- Il n'est pas nécessaire d'appuyer longtemps sur la fonction de démarrage pour modifier Jelly [chapitre]
- [LeetCode] 多数元素【169】
- PMP项目整合管理
- [LeetCode] 反转字符串【344】
- MySQL reset password, forget password, reset root password, reset MySQL password
- Jatpack------LiveData
- [leetcode] reverse string [344]
- P1007 single log bridge
- 用sentinel熔断比例阈值改不了,设置慢调用比例没效果
猜你喜欢

从2022年Q1财报看携程的韧性和远景

Local dealers play the community group purchase mode and share millions of operations

Baidu AI Cloud - create a face recognition application

AES高级加密协议的动机阐述

P1007 独木桥

【喜欢的诗词】好了歌
![[chestnut sugar GIS] how does global mapper batch produce ground contour lines through DSM](/img/5d/c23ec16df6ce8d78207b635f59dc20.png)
[chestnut sugar GIS] how does global mapper batch produce ground contour lines through DSM

分享 10 个 JS 闭包面试题(图解),进来看看你能答对多少
景联文科技低价策略帮助AI企业降低模型训练成本

容器化技术在嵌入式领域的应用
随机推荐
Qt QScrollArea
go 多线程数据搜索
[LeetCode] 数组中的第K个最大元素【215】
海思3559万能平台搭建:在截获的YUV图像上旋转操作
解决Chrome浏览器和Edeg浏览器主页被篡改的方法
kubernetes 使用主机名将 pod 分配在指定节点上
Jielizhi, production line assembly link [chapter]
杰理之充电拔出,无法触摸开机【篇】
AES高级加密协议的动机阐述
数据标注典型案例,景联文科技如何助力企业搭建数据方案
'when to use const char * and when to use const char []' - when to use const char * and when to use const char []
odoo13搭建医院HRP环境(详细步骤)
[Luogu p1541] tortoise chess [DP]
Freshman learning sharing
【板栗糖GIS】arcmap—为什么使用自定义捕捉的时候,经典捕捉的勾要去掉呢?
Hanging mirror security won four global infosec awards on rsac2022
Rails 3 activerecord: sort by association count - rails 3 activerecord: order by count on Association
[leetcode] there are duplicate elements [217]
Odoo13 build a hospital HRP environment (detailed steps)
go 条件变量