当前位置:网站首页>Matlab finds the position of a row or column in the matrix
Matlab finds the position of a row or column in the matrix
2022-07-03 01:07:00 【51CTO】
function ismember
Format k = ismember(a,S) % When a The element in belongs to S when ,k take 1, otherwise ,k take 0.
k = ismember(A,S,'rows') %A、S Have the same columns , The return line is the same k take 1, Not the same 0 The column vector .
边栏推荐
- 按键精灵打怪学习-回城买药加血
- 1038 Recover the Smallest Number
- The difference between relational database and non relational database
- 这不平凡的两年,感谢我们一直在一起!
- Kubernetes resource object introduction and common commands (V) - (NFS & PV & PVC)
- Leetcode-934: the shortest Bridge
- RISA rz/g2l processor introduction | frame diagram | power consumption | schematic diagram and hardware design guide
- R language generalized linear model function GLM, (model fit and expression diagnostics), model adequacy evaluation method, use plot function and car package function
- Matlab saves the digital matrix as geospatial data, and the display subscript index must be of positive integer type or logical type. Solve the problem
- 【AutoSAR 三 RTE概述】
猜你喜欢
Vulkan practice first bullet

excel表格计算时间日期的差值,并转化为分钟数
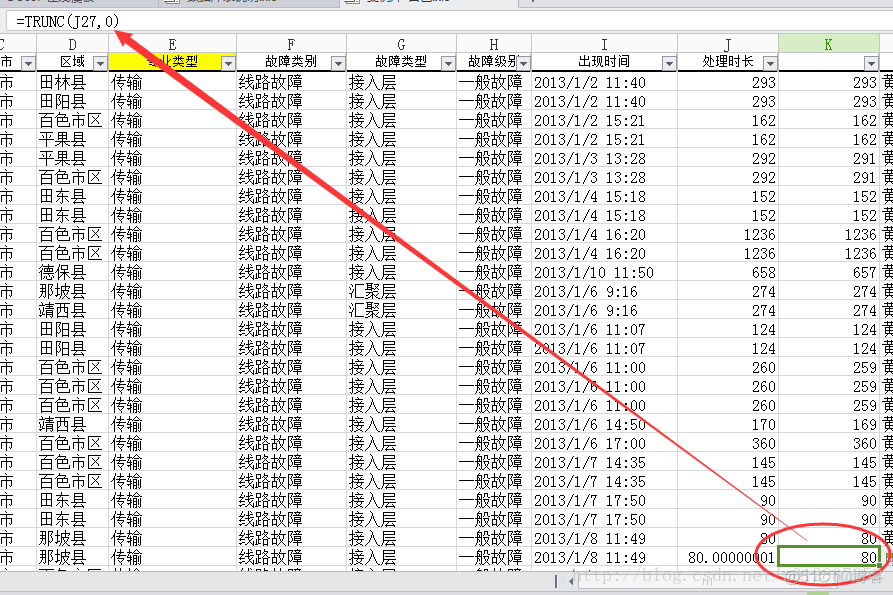
excel去除小数点后面的数据,将数字取整
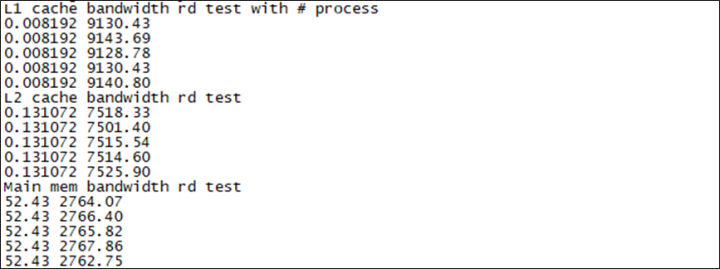
瑞萨RZ/G2L ARM开发板存储读写速度与网络实测

1696C. Fishingprince Plays With Array【思维题 + 中间状态 + 优化存储】
![[AUTOSAR XIII NVM]](/img/38/805ab70f199e2cfad4d9dae0e2c1ff.png)
[AUTOSAR XIII NVM]
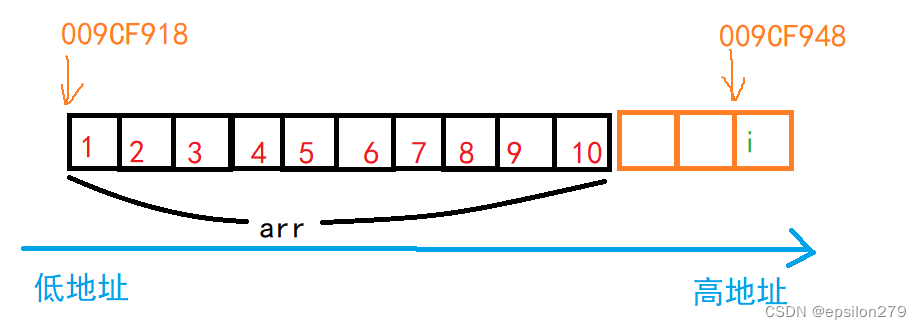
(C语言)数据的存储
【AutoSAR 十二 模式管理】
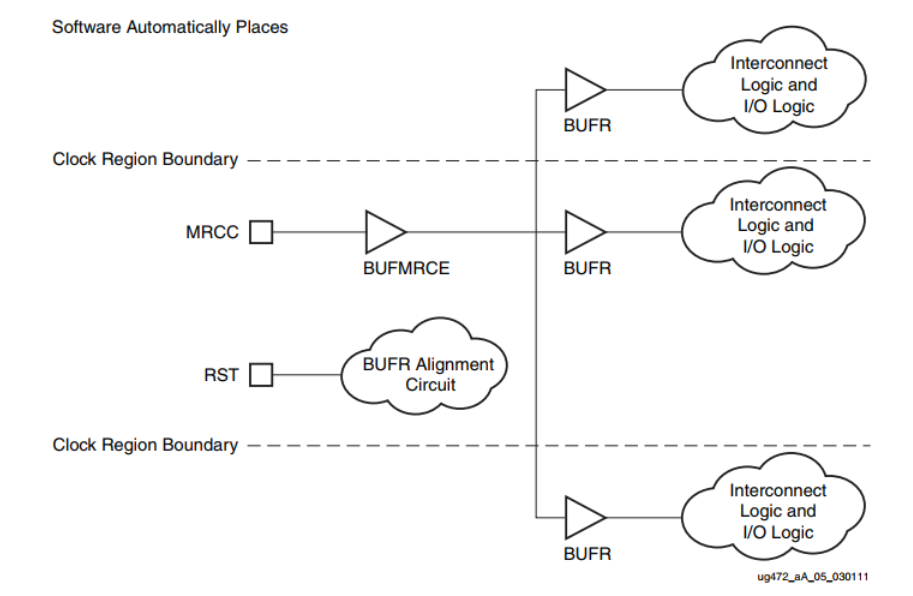
FPGA - 7系列 FPGA内部结构之Clocking -04- 多区域时钟

Explain the basic concepts and five attributes of RDD in detail
随机推荐
测试右移:线上质量监控 ELK 实战
机器学习术语
[AUTOSAR VI description document]
解决ReactNative使用webView存在缓存问题
链表中的节点每k个一组翻转
Specified interval inversion in the linked list
[AUTOSAR II appl overview]
[overview of AUTOSAR four BSW]
In the first half of 2022, there are 10 worth seeing, and each sentence can bring you strength!
465. DFS backtracking of optimal bill balance
Leetcode-2280: represents the minimum number of line segments of a line graph
指针初阶(基础)
【AutoSAR 十二 模式管理】
Embrace the safety concept of platform delivery
12_微信小程序之微信视频号滚动自动播放视频效果实现
数据分析思维分析犯法和业务知识——分析方法(一)
Several cases of recursive processing organization
【无标题】
Lex & yacc & bison & flex configuration problems
excel表格计算时间日期的差值,并转化为分钟数