当前位置:网站首页>三相并网逆变器PI控制——离网模式
三相并网逆变器PI控制——离网模式
2022-07-02 06:34:00 【Quikk】
三相并网逆变器离网PI控制
三相并网逆变器离网控制
逆变器并离网控制基本区别
三相并网逆变器并网状态下,其主要功能是向大电网输送电能。此时系统并网点电压被大电网钳位,因此只需控制逆变器输出满足功率要求的电流,即可实现控制目标,故该状态下并网逆变器一般等效为电流源。
三相并网逆变器离网运行状态下,其主要功能是输出满足负荷运行条件的电压,此时系统输出电流全部由负载自身参数决定。因此该状态下并网逆变器一般等效为电压源。
离网逆变器基本拓扑结构
下图为离网状态下的逆变器拓扑结构,这里用纯电阻代替纯阻性负载:

以逆变器指向负载电流方向为电流参考正方向,即图中 i a i_{a} ia所指方向为正方向。
{ U a − L d i a d t − i a R − U C a = 0 U b − L d i b d t − i b R − U C b = 0 U c − L d i c d t − i c R − U C c = 0 C d u C a d t = i a − i g a C d u C b d t = i b − i g b C d u C c d t = i c − i g c (1) \left\{ \begin{matrix}{} U_a-L\frac{di_a}{dt}-i_aR-U_{Ca}=0\\ U_b-L\frac{di_b}{dt}-i_bR-U_{Cb}=0\\ U_c-L\frac{di_c}{dt}-i_cR-U_{Cc}=0\\ C\frac{du_{Ca}}{dt}=i_a-i_{ga}\\ C\frac{du_{Cb}}{dt}=i_b-i_{gb}\\ C\frac{du_{Cc}}{dt}=i_c-i_{gc}\\ \end{matrix} \right.\tag{1} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧Ua−Ldtdia−iaR−UCa=0Ub−Ldtdib−ibR−UCb=0Uc−Ldtdic−icR−UCc=0CdtduCa=ia−igaCdtduCb=ib−igbCdtduCc=ic−igc(1)
整理可得:
{ d i a d t = 1 L U a − R L i a − 1 L U C a d i b d t = 1 L U b − R L i b − 1 L U C b d i c d t = 1 L U c − R L i c − 1 L U C c d u C a d t = 1 C i a − 1 C i g a d u C b d t = 1 C i b − 1 C i g b d u C c d t = 1 C i c − 1 C i g c (2) \left\{ \begin{matrix}{} \frac{di_a}{dt}=\frac{1}{L}U_a-\frac{R}{L}i_a-\frac{1}{L}U_{Ca}\\ \frac{di_b}{dt}=\frac{1}{L}U_b-\frac{R}{L}i_b-\frac{1}{L}U_{Cb}\\ \frac{di_c}{dt}=\frac{1}{L}U_c-\frac{R}{L}i_c-\frac{1}{L}U_{Cc}\\ \frac{du_{Ca}}{dt}=\frac{1}{C}i_a-\frac{1}{C}i_{ga}\\ \frac{du_{Cb}}{dt}=\frac{1}{C}i_b-\frac{1}{C}i_{gb}\\ \frac{du_{Cc}}{dt}=\frac{1}{C}i_c-\frac{1}{C}i_{gc}\\ \end{matrix} \right.\tag{2} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧dtdia=L1Ua−LRia−L1UCadtdib=L1Ub−LRib−L1UCbdtdic=L1Uc−LRic−L1UCcdtduCa=C1ia−C1igadtduCb=C1ib−C1igbdtduCc=C1ic−C1igc(2)
写成矩阵形式为:
{ [ d i a d t d i b d t d i c d t ] = 1 L [ U a U b U c ] − R L [ i a i b i c ] − 1 L [ U C a U C b U C c ] [ d U C a d t d U C b d t d U C c d t ] = 1 C [ i a i b i c ] − 1 C [ i g a i g b i g c ] (3) \left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]= \frac{1}{L} \left[ \begin{matrix}{} U_a\\ U_b\\ U_c\\ \end{matrix} \right]- \frac{R}{L} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{L} \left[ \begin{matrix}{} U_{Ca}\\ U_{Cb}\\ U_{Cc}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{Ca}}{dt}\\ \frac{dU_{Cb}}{dt}\\ \frac{dU_{Cc}}{dt} \end{matrix} \right]= \frac{1}{C} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{C} \left[ \begin{matrix}{} i_{ga}\\ i_{gb}\\ i_{gc}\\ \end{matrix} \right] \end{matrix} \right.\tag{3} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiadtdibdtdic⎦⎤=L1⎣⎡UaUbUc⎦⎤−LR⎣⎡iaibic⎦⎤−L1⎣⎡UCaUCbUCc⎦⎤⎣⎡dtdUCadtdUCbdtdUCc⎦⎤=C1⎣⎡iaibic⎦⎤−C1⎣⎡igaigbigc⎦⎤(3)
α β \alpha\beta αβ坐标系下逆变器方程
又已知abc- α β \alpha\beta αβ正逆变换矩阵为:
[ U α U β U 0 ] = T a b c − α β [ U a U b U c ] = 2 3 × [ 1 − 1 2 − 1 2 0 3 2 − 3 2 1 1 1 ] [ U a U b U c ] (4) \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ U_0 \end{matrix} \right] = T_{abc-\alpha\beta} \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right] = \frac{2}{3}\times \left[ \begin {matrix} 1 & -\frac{1}{2} & -\frac{1}{2}\\ 0 & \frac{\sqrt{3}}{2} & -\frac{\sqrt{3}}{2}\\ 1 & 1 & 1 \end{matrix} \right] \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right]\tag{4} ⎣⎡UαUβU0⎦⎤=Tabc−αβ⎣⎡UaUbUc⎦⎤=32×⎣⎡101−21231−21−231⎦⎤⎣⎡UaUbUc⎦⎤(4)
[ U a U b U c ] = T α β − a b c [ U α U β U 0 ] = [ 1 0 1 2 − 1 2 3 2 1 2 − 1 2 − 3 2 1 2 ] [ U α U β U 0 ] (5) \left[ \begin {matrix}{} U_a\\ U_b\\ U_c \end{matrix} \right]= T_{\alpha\beta-abc} \left[ \begin {matrix} U_{\alpha}\\ U_{\beta}\\ U_0 \end{matrix} \right]= \left[ \begin {matrix} 1 & 0 & \frac{1}{2}\\ -\frac{1}{2} & \frac{\sqrt{3}}{2} & \frac{1}{2}\\ -\frac{1}{2} & -\frac{\sqrt{3}}{2} & \frac{1}{2} \end{matrix} \right] \left[ \begin {matrix} U_{\alpha}\\ U_{\beta}\\ U_0 \end{matrix} \right]\tag{5} ⎣⎡UaUbUc⎦⎤=Tαβ−abc⎣⎡UαUβU0⎦⎤=⎣⎢⎡1−21−21023−23212121⎦⎥⎤⎣⎡UαUβU0⎦⎤(5)
这里补充了0轴是为了使变换矩阵变成方阵,利于求逆,实际上0轴不参与控制运算使用。
对式(3)两边同时乘以 T a b c − α β T_{abc-\alpha\beta} Tabc−αβ即可将逆变器方程变换到 α β \alpha\beta αβ坐标系下,可得:
T a b c − α β [ d i a d t d i b d t d i c d t ] = 1 L T a b c − α β [ U a U b U c ] − R L T a b c − α β [ i a i b i c ] − 1 L T a b c − α β [ U C a U C b U C c ] \begin{matrix}{} T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right]= \frac{1}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} U_a\\ U_b\\ U_c\\ \end{matrix} \right]- \frac{R}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} i_a\\ i_b\\ i_c\\ \end{matrix} \right]- \frac{1}{L} T_{abc-\alpha\beta} \left[ \begin{matrix}{} U_{Ca}\\ U_{Cb}\\ U_{Cc}\\ \end{matrix} \right]\\ \end{matrix}{} Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=L1Tabc−αβ⎣⎡UaUbUc⎦⎤−LRTabc−αβ⎣⎡iaibic⎦⎤−L1Tabc−αβ⎣⎡UCaUCbUCc⎦⎤
这里注意只有
[ U α U β U 0 ] = T a b c − α β [ U a U b U c ] \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ U_0 \end{matrix} \right]= T_{abc-\alpha\beta} \left[ \begin {matrix} U_a\\ U_b\\ U_c \end{matrix} \right] ⎣⎡UαUβU0⎦⎤=Tabc−αβ⎣⎡UaUbUc⎦⎤
因此 T a b c − α β [ d i a d t d i b d t d i c d t ] T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤需要进行单独求取,求取过程如下:
[ i α i β i 0 ] ′ = ( T a b c − α β [ i a i b i c ] ) ′ = ( T a b c − α β ) ′ [ i a i b i c ] + ( T a b c − α β ) [ d i a d t d i b d t d i c d t ] \left[ \begin {matrix}{} i_\alpha\\ i_\beta\\ i_0 \end{matrix} \right]' = (T_{abc-\alpha\beta} \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right])' = (T_{abc-\alpha\beta})' \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right] + (T_{abc-\alpha\beta}) \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] ⎣⎡iαiβi0⎦⎤′=(Tabc−αβ⎣⎡iaibic⎦⎤)′=(Tabc−αβ)′⎣⎡iaibic⎦⎤+(Tabc−αβ)⎣⎡dtdiadtdibdtdic⎦⎤
因此
T a b c − α β [ d i a d t d i b d t d i c d t ] = ( T a b c − α β [ i a i b i c ] ) ′ − ( T a b c − α β ) ′ [ i a i b i c ] T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] = (T_{abc-\alpha\beta} \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right])' - (T_{abc-\alpha\beta})' \left[ \begin {matrix}{} i_a\\ i_b\\ i_c \end{matrix} \right] Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=(Tabc−αβ⎣⎡iaibic⎦⎤)′−(Tabc−αβ)′⎣⎡iaibic⎦⎤
而 ( T a b c − α β ) (T_{abc-\alpha\beta}) (Tabc−αβ)为常数矩阵,因此
( T a b c − α β ) ′ = 0 (T_{abc-\alpha\beta})'=0 (Tabc−αβ)′=0
所以:
T a b c − α β [ d i a d t d i b d t d i c d t ] = [ d i α d t d i β d t d i 0 d t ] T_{abc-\alpha\beta} \left[ \begin{matrix}{} \frac{di_a}{dt}\\ \frac{di_b}{dt}\\ \frac{di_c}{dt} \end{matrix} \right] = \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right] Tabc−αβ⎣⎡dtdiadtdibdtdic⎦⎤=⎣⎡dtdiαdtdiβdtdi0⎦⎤
同理可得:
{ [ d i α d t d i β d t d i 0 d t ] = 1 L [ U α U β U 0 ] − R L [ i α i β i 0 ] − 1 L [ U C α U C β U C 0 ] [ d U C α d t d U C β d t d U C 0 d t ] = 1 C [ i α i β i 0 ] − 1 C [ i g α i g β i g 0 ] (6) \left\{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\\ \frac{di_0}{dt} \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta}\\ U_0\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ U_{C0}\\ \end{matrix} \right]\\ \left[ \begin{matrix}{} \frac{dU_{C\alpha}}{dt}\\ \frac{dU_{C\beta}}{dt}\\ \frac{dU_{C0}}{dt} \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta}\\ i_0\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{g\alpha}\\ i_{g\beta}\\ i_{g0}\\ \end{matrix} \right] \end{matrix} \right.\tag{6} ⎩⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎧⎣⎡dtdiαdtdiβdtdi0⎦⎤=L1⎣⎡UαUβU0⎦⎤−LR⎣⎡iαiβi0⎦⎤−L1⎣⎡UCαUCβUC0⎦⎤⎣⎡dtdUCαdtdUCβdtdUC0⎦⎤=C1⎣⎡iαiβi0⎦⎤−C1⎣⎡igαigβig0⎦⎤(6)
dq坐标系下逆变器方程
又已知 α β \alpha\beta αβ-dq正逆变换矩阵为:
[ U d U q ] = T α β − d q [ U α U β ] = [ c o s φ s i n φ − s i n φ c o s φ ] [ U α U β ] \left[ \begin {matrix}{} U_d\\ U_q\\ \end{matrix} \right] = T_{\alpha\beta-dq} \left[ \begin {matrix} U_\alpha\\ U_\beta\\ \end{matrix} \right] = \left[ \begin {matrix} cos\varphi & sin\varphi \\ -sin\varphi & cos\varphi \end{matrix} \right] \left[ \begin {matrix} U_\alpha\\ U_\beta\\ \end{matrix} \right] [UdUq]=Tαβ−dq[UαUβ]=[cosφ−sinφsinφcosφ][UαUβ]
[ U α U β ] = T d q − α β U d U q = [ c o s φ − s i n φ s i n φ c o s φ ] [ U d U q ] \left[ \begin {matrix}{} U_\alpha\\ U_\beta\\ \end{matrix} \right] = T_{dq-\alpha\beta} \begin {matrix} U_d\\ U_q\\ \end{matrix} = \left[ \begin {matrix} cos\varphi & -sin\varphi \\ sin\varphi & cos\varphi \end{matrix} \right] \left[ \begin {matrix} U_d\\ U_q\\ \end{matrix} \right] [UαUβ]=Tdq−αβUdUq=[cosφsinφ−sinφcosφ][UdUq]
将上述 α β \alpha\beta αβ坐标下逆变器方程去掉0轴方程,并同时乘以变换矩阵 T α β − d q T_{\alpha\beta-dq} Tαβ−dq可得:
T α β − d q [ d i α d t d i β d t ] = 1 L T α β − d q [ U α U β ] − R L T α β − d q [ i α i β ] − 1 L T α β − d q [ U C α U C β ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt} \end{matrix} \right] = \frac{1}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} U_{\alpha}\\ U_{\beta} \end{matrix} \right] - \frac{R}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta} \end{matrix} \right] - \frac{1}{L} T_{\alpha\beta-dq} \left[ \begin{matrix}{} U_{C\alpha}\\ U_{C\beta}\\ \end{matrix} \right]\\ Tαβ−dq[dtdiαdtdiβ]=L1Tαβ−dq[UαUβ]−LRTαβ−dq[iαiβ]−L1Tαβ−dq[UCαUCβ]
同上述过程,需要求取 T α β − d q [ d i α d t d i β d t ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt}\end{matrix} \right] Tαβ−dq[dtdiαdtdiβ],此时 φ = ω t \varphi=\omega t φ=ωt , ( T α β − d q ) ′ (T_{\alpha\beta-dq})' (Tαβ−dq)′ 不再为0。
( T α β − d q ) ′ = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] (T_{\alpha\beta-dq})' = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (Tαβ−dq)′=[−ωsinφ−ωcosφωcosφ−ωsinφ]
T α β − d q [ d i α d t d i β d t ] = = [ d i d d t d i q d t ] − [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] [ i α i β ] = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] ( T α β − d q ) − 1 [ i d i q ] = [ − ω s i n φ ω c o s φ − ω c o s φ − ω s i n φ ] ( T α β − d q ) − 1 [ i d i q ] = ω [ 0 1 − 1 0 ] [ i d i q ] T_{\alpha\beta-dq} \left[ \begin{matrix}{} \frac{di_{\alpha}}{dt}\\ \frac{di_{\beta}}{dt} \end{matrix} \right] == \left[ \begin{matrix}{} \frac{di_{d}}{dt}\\ \frac{di_{q}}{dt} \end{matrix} \right] - \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] \left[ \begin{matrix}{} i_{\alpha}\\ i_{\beta} \end{matrix} \right] = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (T_{\alpha\beta-dq})^{-1} \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right]\\ = \left[ \begin{matrix}{} -\omega sin \varphi & \omega cos \varphi\\ -\omega cos \varphi & -\omega sin \varphi \end{matrix} \right] (T_{\alpha\beta-dq})^{-1} \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right] = \omega \left[ \begin{matrix}{} 0 & 1 \\ -1 & 0 \end{matrix} \right] \left[ \begin{matrix}{} i_{d}\\ i_{q} \end{matrix} \right] Tαβ−dq[dtdiαdtdiβ]==[dtdiddtdiq]−[−ωsinφ−ωcosφωcosφ−ωsinφ][iαiβ]=[−ωsinφ−ωcosφωcosφ−ωsinφ](Tαβ−dq)−1[idiq]=[−ωsinφ−ωcosφωcosφ−ωsinφ](Tαβ−dq)−1[idiq]=ω[0−110][idiq]
代入系统方程可得dq坐标系下的逆变器方程为:
{ [ d i d d t d i q d t ] = 1 L [ U d U q ] − R L [ i d i q ] − 1 L [ U C d U C q ] + ω [ i q − i d ] [ d U C d d t d U C q d t ] = 1 C [ i d i q ] − 1 C [ i g d i g q ] + ω [ U C q − U C d ] (7) \left \{ \begin{matrix}{} \left[ \begin{matrix}{} \frac{di_{d}}{dt}\\ \frac{di_{q}}{dt}\\ \end{matrix} \right] = \frac{1}{L} \left[ \begin{matrix}{} U_{d}\\ U_{q}\\ \end{matrix} \right] - \frac{R}{L} \left[ \begin{matrix}{} i_{d}\\ i_{q}\\ \end{matrix} \right] - \frac{1}{L} \left[ \begin{matrix}{} U_{Cd}\\ U_{Cq}\\ \end{matrix} \right] + \omega \left[ \begin{matrix}{} i_{q}\\ -i_{d}\\ \end{matrix} \right] \\ \left[ \begin{matrix}{} \frac{dU_{Cd}}{dt}\\ \frac{dU_{Cq}}{dt}\\ \end{matrix} \right] = \frac{1}{C} \left[ \begin{matrix}{} i_{d}\\ i_{q}\\ \end{matrix} \right] - \frac{1}{C} \left[ \begin{matrix}{} i_{gd}\\ i_{gq}\\ \end{matrix} \right] +\omega \left[ \begin{matrix}{} U_{Cq}\\ -U_{Cd}\\ \end{matrix} \right] \\ \end{matrix} \right.\tag{7} ⎩⎪⎪⎨⎪⎪⎧[dtdiddtdiq]=L1[UdUq]−LR[idiq]−L1[UCdUCq]+ω[iq−id][dtdUCddtdUCq]=C1[idiq]−C1[igdigq]+ω[UCq−UCd](7)
此时可以发现系统d轴方程存在与q轴耦合的现象,因此需要对系统进行精确控制需要进行dq轴解耦。
对式(7)进行拉普拉斯变换可得:
{ i d = i g d + s C U C d − ω C U C q i q = i g q + s C U C q + ω C U C d U d = ( s L + R ) i d + U C d − ω L i q U q = ( s L + R ) i q + U C q + ω L i d (8) \left\{ \begin{matrix}{} i_d = i_{gd}+sCU_{Cd}-\omega CU_{Cq}\\ i_q = i_{gq}+sCU_{Cq}+\omega CU_{Cd}\\ U_d = (sL+R)i_{d}+U_{Cd}-\omega Li_{q}\\ U_q = (sL+R)i_{q}+U_{Cq}+\omega Li_{d}\\ \end{matrix} \right.\tag{8} ⎩⎪⎪⎨⎪⎪⎧id=igd+sCUCd−ωCUCqiq=igq+sCUCq+ωCUCdUd=(sL+R)id+UCd−ωLiqUq=(sL+R)iq+UCq+ωLid(8)
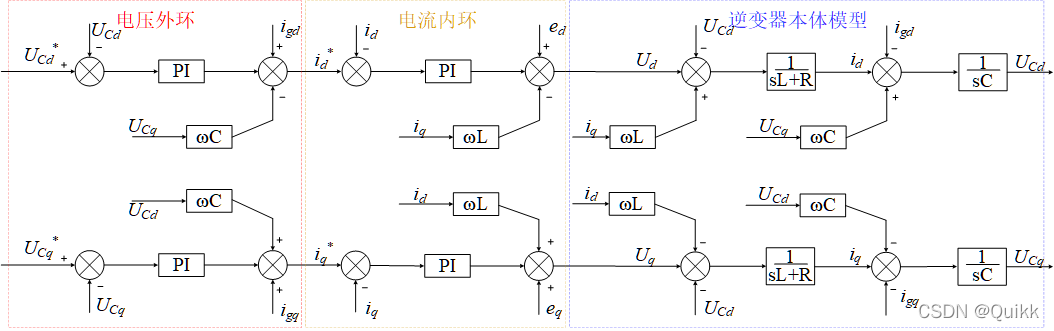
用式(8)可以绘制如下框图。

根据逆变器本体模型可以设置双PI控制原理图,因为通过解耦后结合PI控制器即可实现精准控制。
并网逆变器PI控制器定值跟踪
对于PI控制器
G ( s ) = K P ( 1 + K i s ) = K P s + K P K i s G ( j ω ) = K P j ω + K P K i j ω G_{(s)}=K_P(1+\frac{K_i}{s})=\frac{K_Ps+K_PK_i}{s}\\ G(j\omega) = \frac{K_Pj\omega+K_PK_i}{j\omega} \\ G(s)=KP(1+sKi)=sKPs+KPKiG(jω)=jωKPjω+KPKi
因此:
G ( j 0 ) = K P j 0 + K P K i j 0 = ∞ G(j0) = \frac{K_Pj0+K_PK_i}{j0} = \infty \\ G(j0)=j0KPj0+KPKi=∞
此时闭环传函为:
A = G ( j 0 ) 1 + G ( j 0 ) = 1 A=\frac{G_{(j0)} }{1+G_{(j0)}} = 1 A=1+G(j0)G(j0)=1
所以 PI控制器对频率为0的信号(直流信号)可以实现无静差跟踪!因此在以上过程中需要将逆变器控制模型变换到dq轴,因为dq变换是以PLL输出电压角度进行变换,所以三相电流在dq坐标系下(d轴分量为电流幅值,q轴分量为零)。解耦是为了消除其他轴对PI控制的影响。
仿真结果
SPWM调制信号:
输出线电压(未滤波器前):
负载侧相电压(0.1s并网,0.8s给定功率阶跃):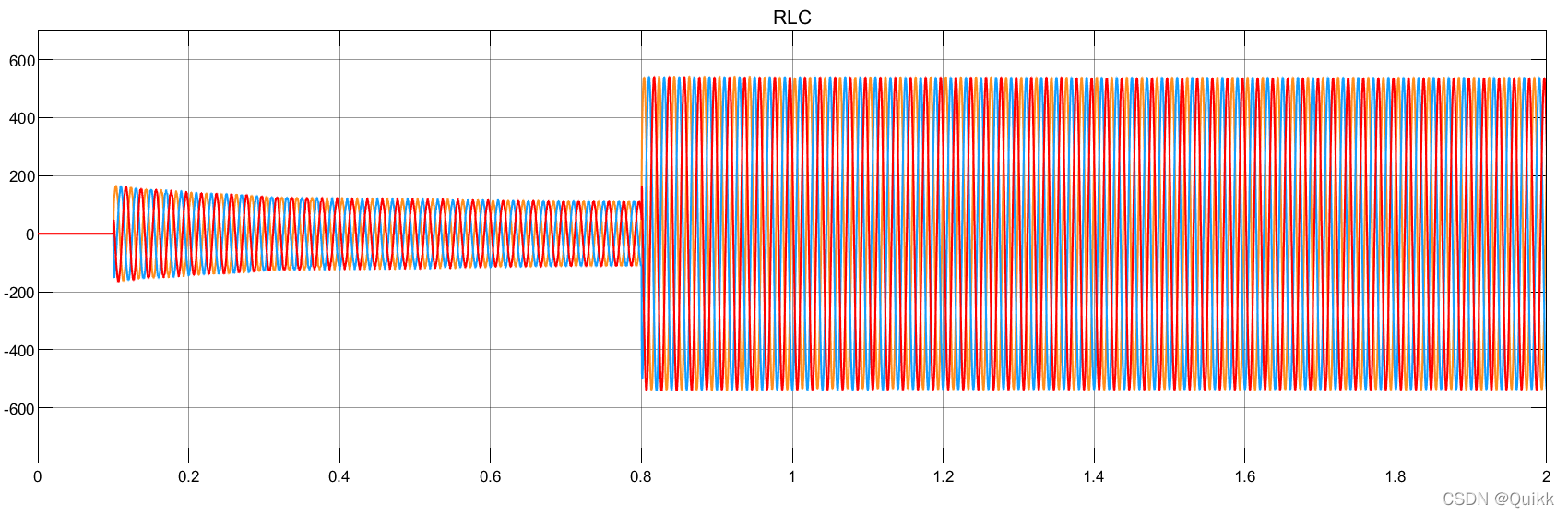
输出功率:
仿真模型:模型链接
边栏推荐
- Read 30 minutes before going to bed every day_ day3_ Files
- Solution to amq4036 error in remote connection to IBM MQ
- 一次聊天勾起的回忆
- kinect dk 获取CV::Mat格式的彩色RGB图像(openpose中使用)
- 分布式锁的这三种实现方式,如何在效率和正确性之间选择?
- Pdf document of distributed service architecture: principle + Design + practice, (collect and see again)
- [go practical basis] gin efficient artifact, how to bind parameters to structures
- Chrome浏览器插件-Fatkun安装和介绍
- [go practical basis] how to bind and use URL parameters in gin
- c语言编程题
猜你喜欢

保存视频 opencv::VideoWriter
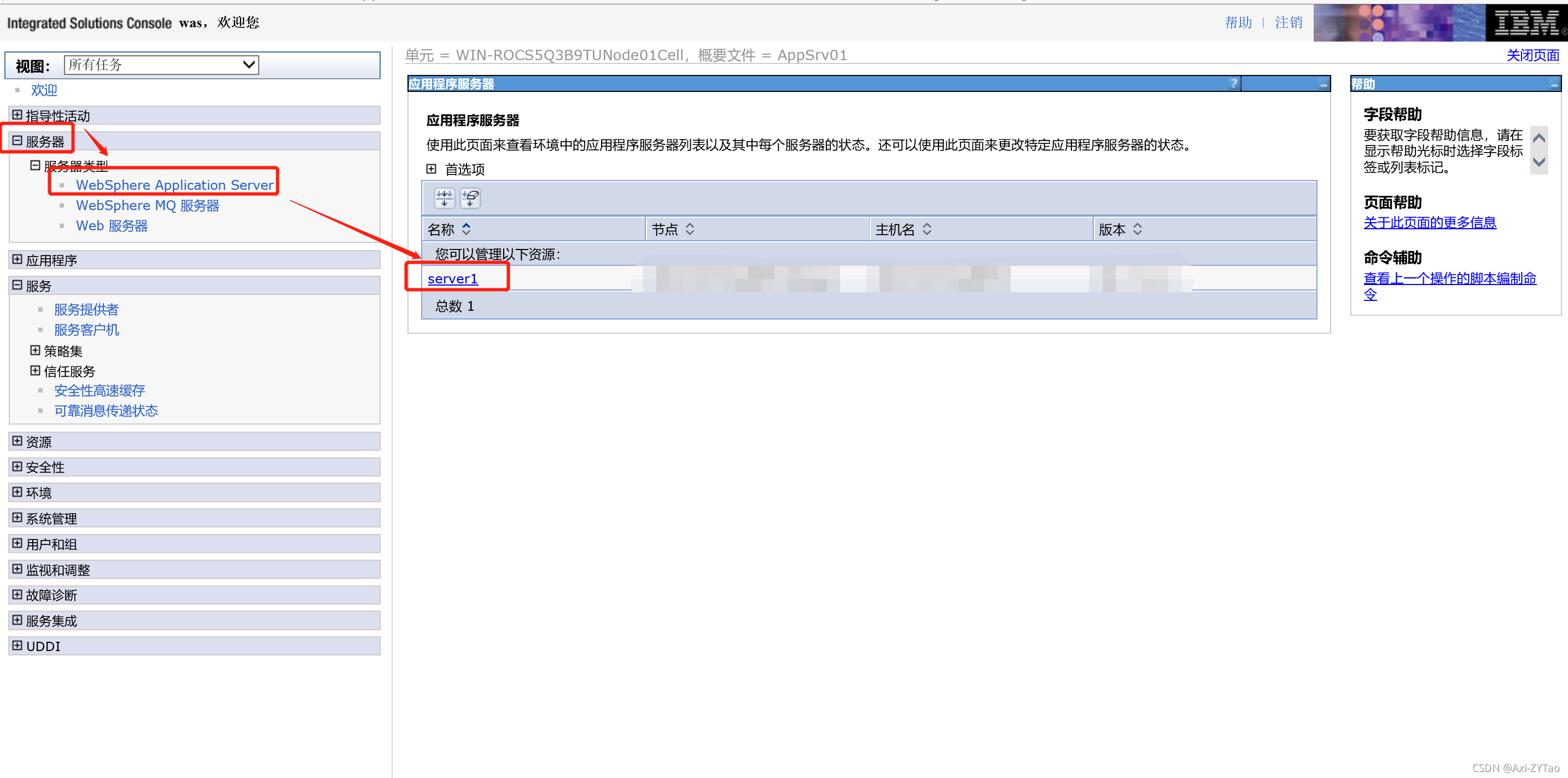
View the port of the application published by was
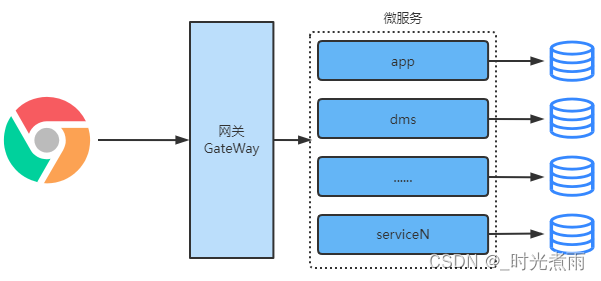
Micro service practice | introduction and practice of zuul, a micro service gateway
Chrome browser tag management plug-in – onetab

hystrix 实现请求合并

Creation and jump of activity

数构(C语言--代码有注释)——第二章、线性表(更新版)
Microservice practice | declarative service invocation openfeign practice

个人经历&&博客现状
西瓜书--第五章.神经网络
随机推荐
Pdf document of distributed service architecture: principle + Design + practice, (collect and see again)
Matplotlib swordsman line - layout guide and multi map implementation (Updated)
分布式锁的这三种实现方式,如何在效率和正确性之间选择?
Methods of classfile
AMQ 4043 solution for errors when using IBM MQ remote connection
Chrome浏览器标签管理插件–OneTab
每天睡前30分钟阅读Day5_Map中全部Key值,全部Value值获取方式
Timed thread pool implements request merging
Navicat 远程连接Mysql报错1045 - Access denied for user ‘root‘@‘222.173.220.236‘ (using password: YES)
Double non undergraduate students enter the factory, while I am still quietly climbing trees at the bottom (Part 1)
数构(C语言)——第四章、矩阵的压缩存储(下)
Fragmenttabhost implements the interface of housing loan calculator
web安全与防御
自定义Redis连接池
Probability is not yet. Look at statistical learning methods -- Chapter 4, naive Bayesian method
C语言之最小数
Thinkphp5 how to determine whether a table exists
[go practical basis] gin efficient artifact, how to bind parameters to structures
Machine learning practice: is Mermaid a love movie or an action movie? KNN announces the answer
How to use pyqt5 to make a sensitive word detection tool