当前位置:网站首页>Opencv learning notes 8 -- answer sheet recognition
Opencv learning notes 8 -- answer sheet recognition
2022-07-06 07:32:00 【Cloudy_ to_ sunny】
opencv Learning notes 8 -- Answer card recognition
Import toolkit
# Import toolkit
import numpy as np
import argparse
import imutils
import cv2
import matplotlib.pyplot as plt#Matplotlib yes RGB
# right key
ANSWER_KEY = {
0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
Defined function
def order_points(pts):
# altogether 4 Coordinates
rect = np.zeros((4, 2), dtype = "float32")
# Find the corresponding coordinates in order 0123 Namely Top left , The upper right , The lower right , The lower left
# Calculate top left , The lower right
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# Count right up and left down
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
# Get the input coordinate point
rect = order_points(pts)
(tl, tr, br, bl) = rect
# Calculate the input w and h value
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
# Corresponding coordinate position after transformation
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# Calculate the transformation matrix
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# Return the result after transformation
return warped
def sort_contours(cnts, method="left-to-right"):
reverse = False
i = 0
if method == "right-to-left" or method == "bottom-to-top":
reverse = True
if method == "top-to-bottom" or method == "bottom-to-top":
i = 1
boundingBoxes = [cv2.boundingRect(c) for c in cnts]
(cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),
key=lambda b: b[1][i], reverse=reverse))
return cnts, boundingBoxes
# Show function
def cv_show(name,img):
b,g,r = cv2.split(img)
img_rgb = cv2.merge((r,g,b))
plt.imshow(img_rgb)
plt.show()
def cv_show1(name,img):
plt.imshow(img)
plt.show()
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
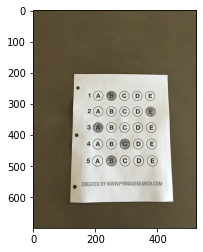
scanning
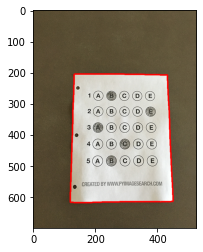
# Preprocessing
image = cv2.imread("./images/test_01.png")
contours_img = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0) # Gauss filtering
cv_show1('blurred',blurred)
edged = cv2.Canny(blurred, 75, 200) # edge detection
cv_show1('edged',edged)

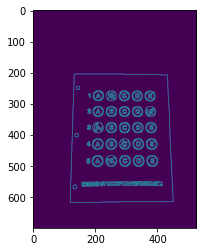
# Contour detection
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(contours_img,cnts,-1,(0,0,255),3)
cv_show('contours_img',contours_img)
docCnt = None
# Make sure that... Is detected
if len(cnts) > 0:
# Sort by outline size
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
# Traverse every contour
for c in cnts:
# The approximate
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# Prepare for perspective change
if len(approx) == 4:
docCnt = approx
break
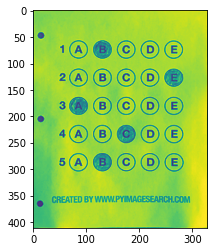
# Perform perspective transformation
warped = four_point_transform(gray, docCnt.reshape(4, 2))
cv_show1('warped',warped)
Adaptive threshold processing
# Otsu's Threshold processing
thresh = cv2.threshold(warped, 0, 255,
cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
thresh_Contours = thresh.copy()
cv_show1('thresh_Contours',thresh_Contours)
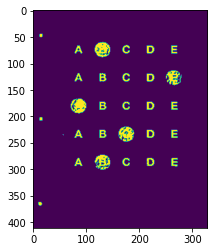
Detect the outline of each option
# Find the outline of each circle
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3) # Because it is a binary image , So as long as it's not 255,255,255 Will turn black
print(len(cnts))
cv_show1('thresh_Contours',thresh_Contours)
questionCnts = []
82
# Traverse
for c in cnts:
# Calculate scale and size
(x, y, w, h) = cv2.boundingRect(c)
ar = w / float(h)
# Specify the standard according to the actual situation
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append(c)
Sort the outline to get the sequence number
# Sort from top to bottom
questionCnts = sort_contours(questionCnts,
method="top-to-bottom")[0]
correct = 0
# Each row has 5 An option
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# Sort
cnts = sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
# Traverse every result
for (j, c) in enumerate(cnts):
# Use mask To judge the result
mask = np.zeros(thresh.shape, dtype="uint8")
cv2.drawContours(mask, [c], -1, 255, -1) #-1 Indicates filling
# Choose this answer by calculating the number of nonzero points
mask = cv2.bitwise_and(thresh, thresh, mask=mask)
total = cv2.countNonZero(mask)
cv_show1('mask',mask)
# Judging by threshold
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
# Compare the right answers
color = (0, 0, 255)
k = ANSWER_KEY[q]
# To judge correctly
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
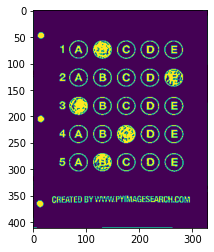
# mapping
cv2.drawContours(warped, [cnts[k]], -1, color, 3)
 |  |  |  |  |
 |  |  |  |  |
 |  |  |  |  |
 |  |  |  |  |
 |  |  |  |  |
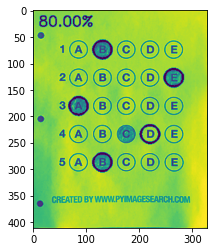
Print the results
score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(warped, "{:.2f}%".format(score), (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv_show("Original", image)
cv_show1("Exam", warped)
[INFO] score: 80.00%
Reference resources
边栏推荐
- On the world of NDK (2)
- 1015 reversible primes (20 points) prime d-ary
- Excel的相关操作
- After the hot update of uniapp, "mismatched versions may cause application exceptions" causes and Solutions
- Ali's redis interview question is too difficult, isn't it? I was pressed on the ground and rubbed
- How Navicat imports MySQL scripts
- [MySQL learning notes 30] lock (non tutorial)
- http缓存,强制缓存,协商缓存
- The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
- js对象获取属性的方法(.和[]方式)
猜你喜欢
Crawling exercise: Notice of crawling Henan Agricultural University
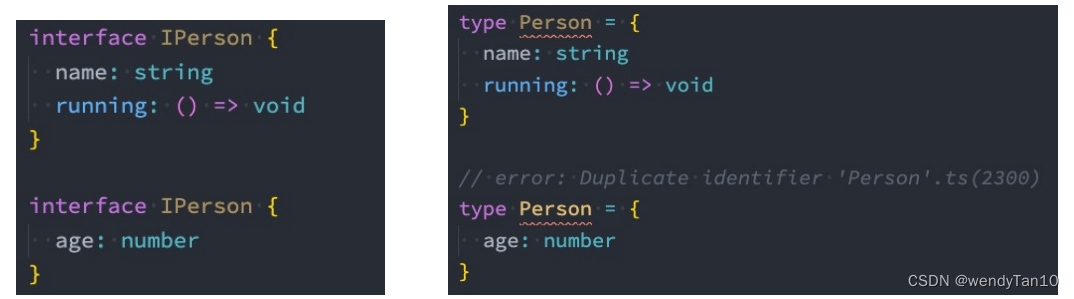
TypeScript接口与泛型的使用

The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
![[window] when the Microsoft Store is deleted locally, how to reinstall it in three steps](/img/57/ee979a7db983ad56f0df7345dbc91f.jpg)
[window] when the Microsoft Store is deleted locally, how to reinstall it in three steps
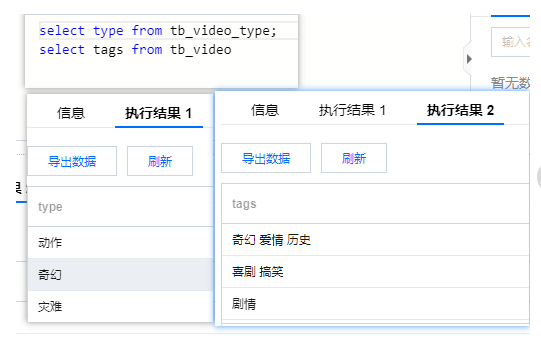
mysql如何合并数据
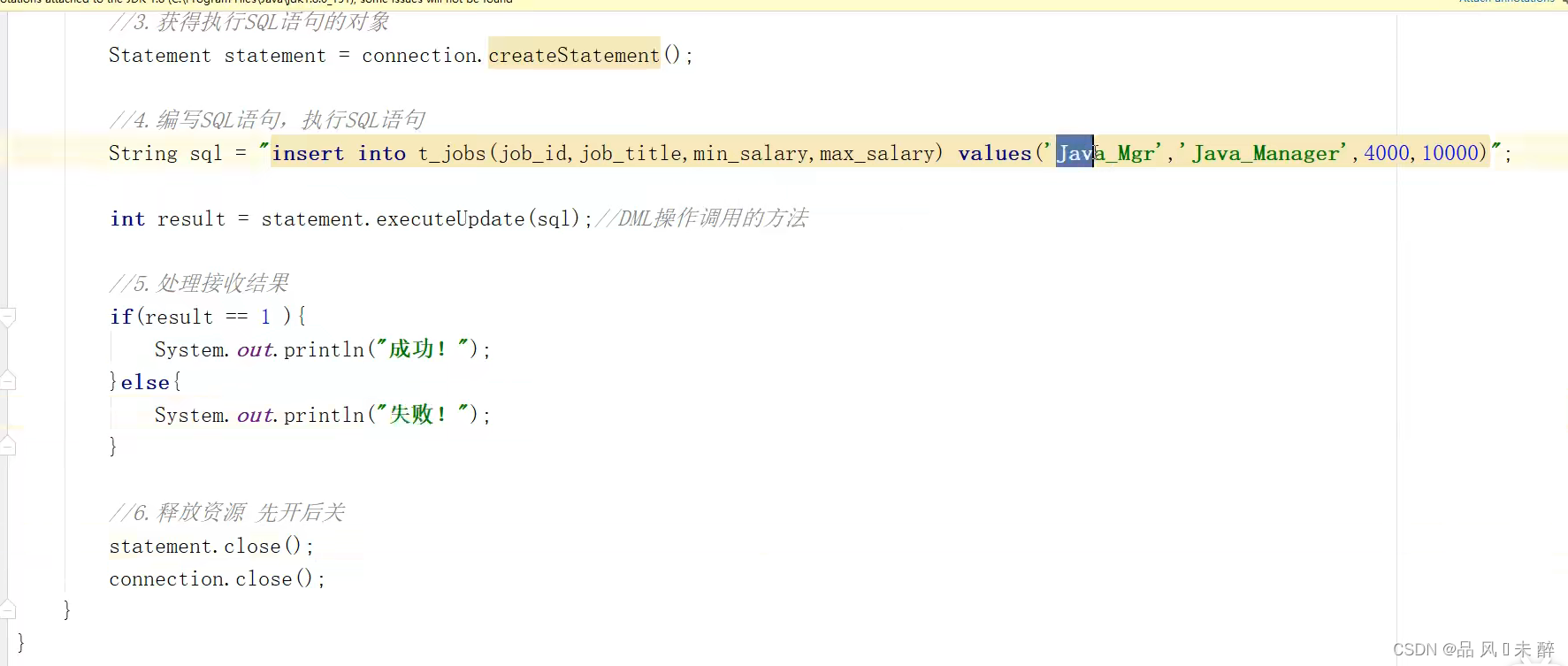
JDBC learning notes
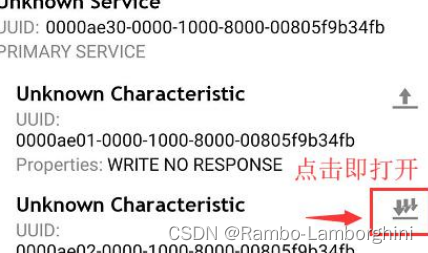
杰理之蓝牙设备想要发送数据给手机,需要手机先打开 notify 通道【篇】
![When the Jericho development board is powered on, you can open the NRF app with your mobile phone [article]](/img/3e/3d5bff87995b4a9fac093a6d9f9473.png)
When the Jericho development board is powered on, you can open the NRF app with your mobile phone [article]
Pre knowledge reserve of TS type gymnastics to become an excellent TS gymnastics master

【mysql学习笔记30】锁(非教程)
随机推荐
Simulation of Michelson interferometer based on MATLAB
Résumé de la structure du modèle synthétisable
数字IC设计笔试题汇总(一)
TS 体操 &(交叉运算) 和 接口的继承的区别
#systemverilog# 可綜合模型的結構總結
word怎么只删除英语保留汉语或删除汉语保留英文
The difference between TS Gymnastics (cross operation) and interface inheritance
After the hot update of uniapp, "mismatched versions may cause application exceptions" causes and Solutions
TS 类型体操 之 循环中的键值判断,as 关键字使用
If Jerry needs to send a large package, he needs to modify the MTU on the mobile terminal [article]
超级浏览器是指纹浏览器吗?怎样选择一款好的超级浏览器?
TS 类型体操 之 extends,Equal,Alike 使用场景和实现对比
Significance and measures of encryption protection for intelligent terminal equipment
[MySQL learning notes 29] trigger
OpenJudge NOI 2.1 1661:Bomb Game
[MySQL learning notes 30] lock (non tutorial)
Méthode d'obtention des propriétés de l'objet JS (.Et [] méthodes)
Do you really think binary search is easy
NiO programming introduction
Emo diary 1