当前位置:网站首页>001_旭日X3派初探:开箱测试
001_旭日X3派初探:开箱测试
2022-08-03 05:24:00 【Liu_Qingli】
文章目录
1. 缘起
2022年6月14日,旭日X3派机器人开发板正式发布。看了发布会的视频,立刻决定,拍下第一块旭日派,看看时间,6月15日凌晨2点。
2. 开箱验货
第一块旭日X3派到手,迫不及待拆开瞅瞅。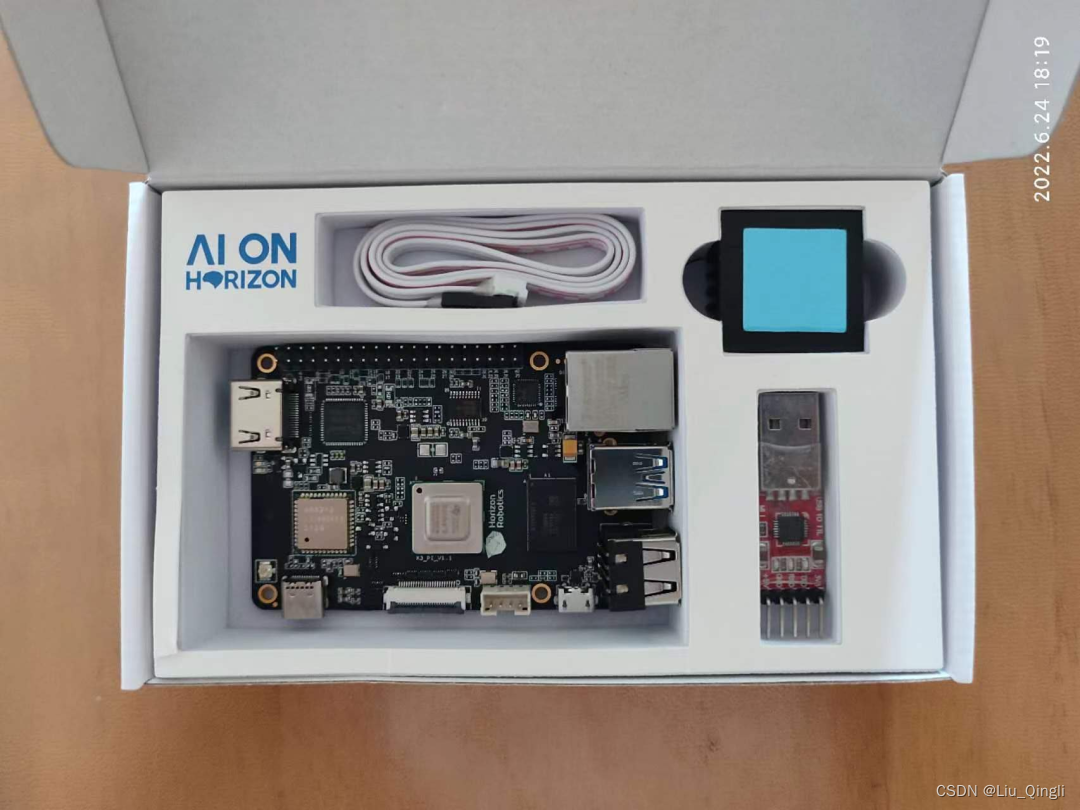
3. 准备工作
先准备好元器件:旭日X3派,电源线(5V3A),TF卡(16G),读卡器,摄像头组件,串口通讯模块,显示屏(器),HDMI线,外带一瓶可乐
4. 开始刷机
先下载镜像文件和用于烧录的工具软件。
4.1 系统镜像文件
https://developer.horizon.ai/resource
系统镜像文件有“服务版”和“桌面版”,由于旭日X3芯片不支持GPU硬件加速,因此使用Ubuntu Desktop版本(桌面版)时,可能会因CPU渲染图形桌面而造成系统负载过大,如对系统性能有较高要求,推荐使用不带图形桌面的Ubuntu Server版本(服务版)。下载后解压,获得系统镜像文件system_sdcard.img。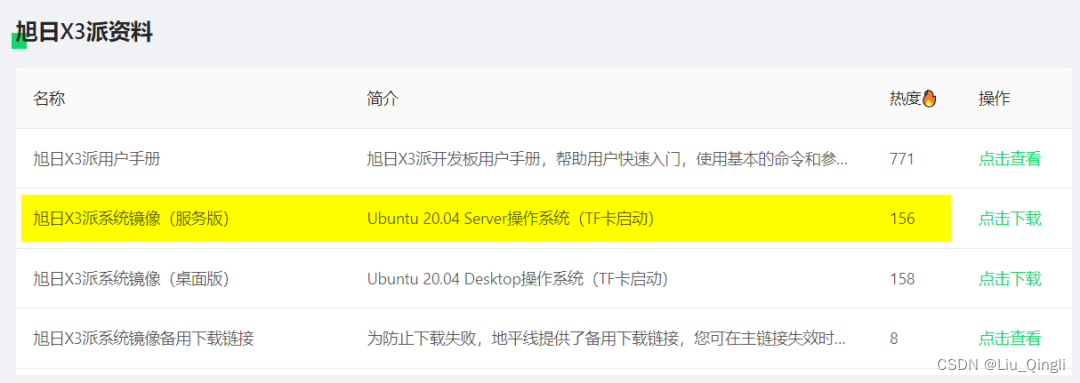
4.2 下载安装烧录工具
https://developer.horizon.ai/resource
烧录工具官方推荐balenaEtcher、rufus等第三方PC工具,用于一键式制作TF启动盘,同样可以在地平线“文档中心”下载,个人比较喜欢balenaEtcher的界面。
4.3 烧录系统
电脑插入TF卡(最好是新的TF卡,老TF卡可能出现测试不成功的情况),打开balenaEtcher软件,第一步选择镜像文件,第二步选择目标存储设备(TF卡),第三步Flash一下。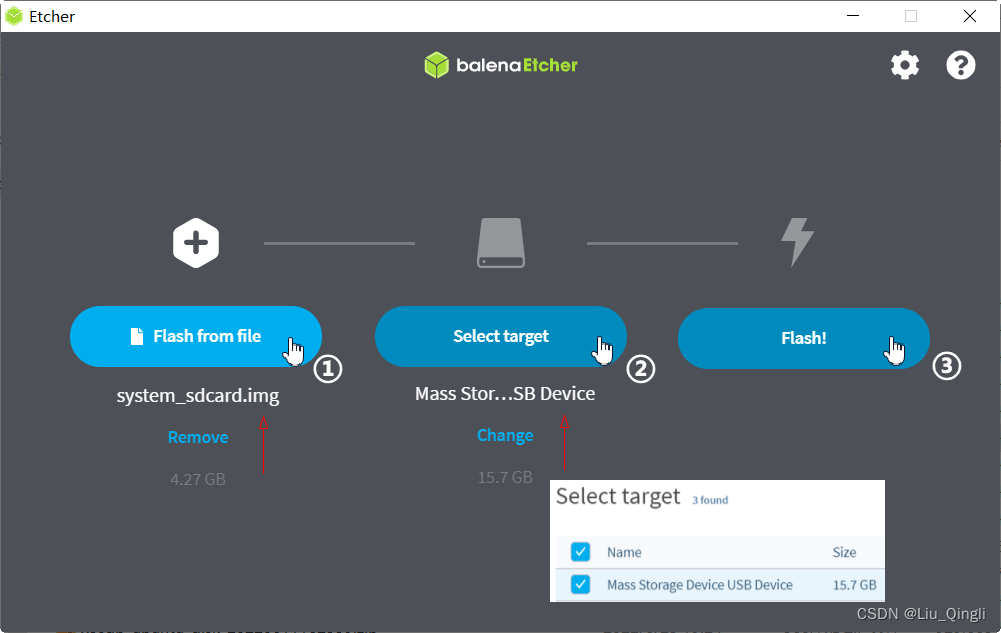
4.4 插入TF卡
系统启动盘制作完成后,取出TF卡,将TF卡插入旭日X3开发板。
5. 串口调试
5.1 下载安装串口驱动
系统可以自动识别串口的略过,串口驱动程序可在地平线“文档中心”下载。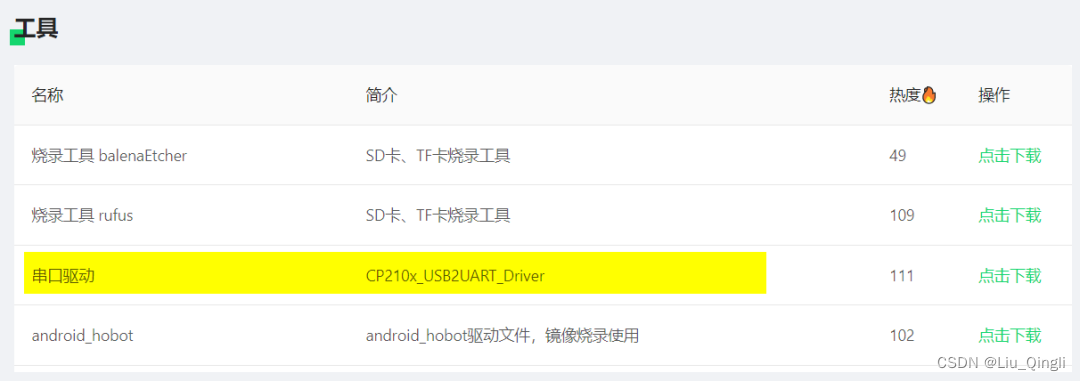
5.2 接线
将串口模块接线端插入旭日派开发板串口通讯接口,一端插入电脑USB口,检查电脑硬件,确认已经识别到串口端口号(本机为COM7)。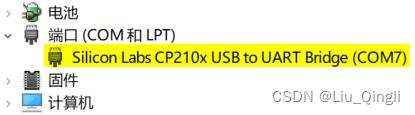
5.3 下载并运行串口调试工具 MobaXterm
https://mobaxterm.mobatek.net/download.html
运行串口调试工具MobaXterm→USB插入串口模块→单击“Session”→单击“Serial”→选择端口“COM7”→选择波特率“921600”→板卡供电→输入用户名和密码(sunrise)
6. Hello World
旭日X3的Hello World其实可以非常special:
6.1 连接MIPI摄像头
将摄像头模组通过FPC排线接到开发板MIPI CSI接口上,接线时注意,FPC排线蓝色标识向上,连接两端接口;
6.2 连接显示器
通过HDMI线缆连接开发板和显示器。
6.3 运行图像识别程序
输入以下命令行:
[email protected]:~$ cd /app/ai_inference/03_mipi_camera_sample/
[email protected]:/app/ai_inference/03_mipi_camera_sample$ sudo python3 ./mipi_camera.py

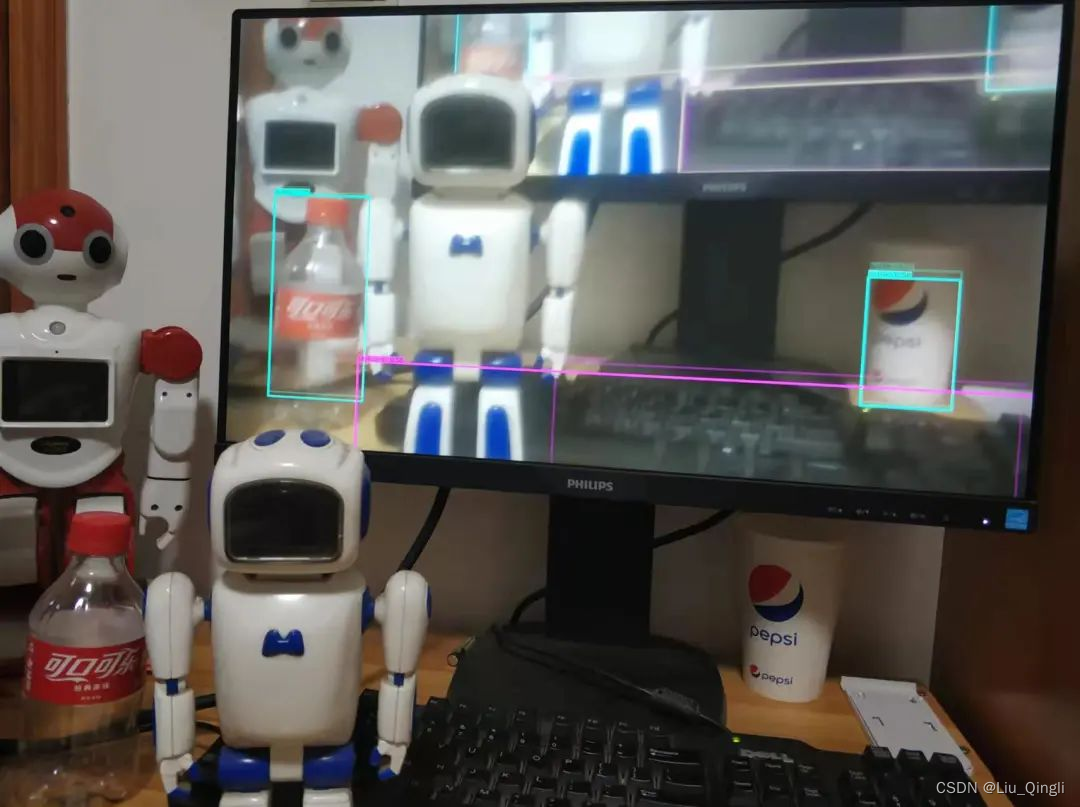
我的可乐瓶子轻松识别出来了,但是两台Robot没有识别出来,再动动摄像头,终于找到我的Robot,识别为“Parking meter”,我发现还真有点像。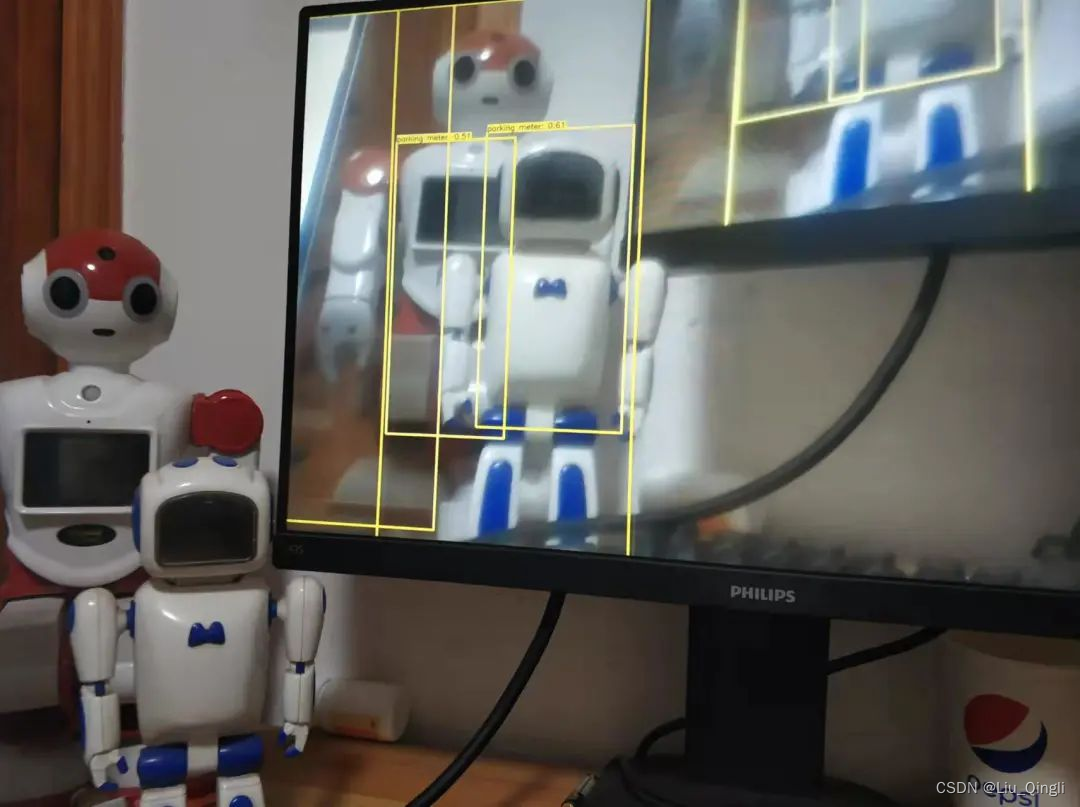

感谢旭日,从地平线升起!
边栏推荐
- Browser multi-threaded off-screen rendering, compression and packaging scheme
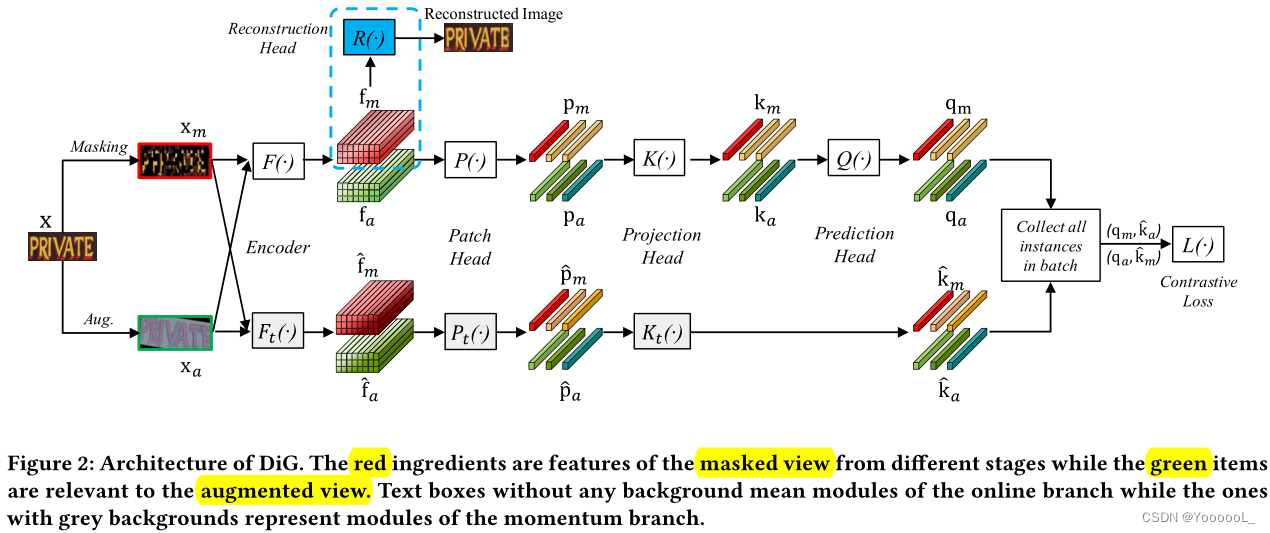
- 自监督论文阅读笔记DisCo: Remedy Self-supervised Learning on Lightweight Models with Distilled Contrastive
- MySql 怎么查出符合条件的最新的数据行?
- 漫谈Map Reduce 参数优化
- 中国食品微生物检测行业深度监测及投资战略规划建议报告2022~2028年
- new / malloc / delete / free之间的区别
- 中国融资租赁行业市场投资分析与前景战略规划建议报告2022~2028年
- Oracle 分区索引详解(local、global)
- 建立平衡二叉树简单demo
- 自监督论文阅读笔记 Ship Detection in Sentinel 2 Multi-Spectral Images with Self-Supervised Learning
猜你喜欢
自监督论文阅读笔记DisCo: Remedy Self-supervised Learning on Lightweight Models with Distilled Contrastive
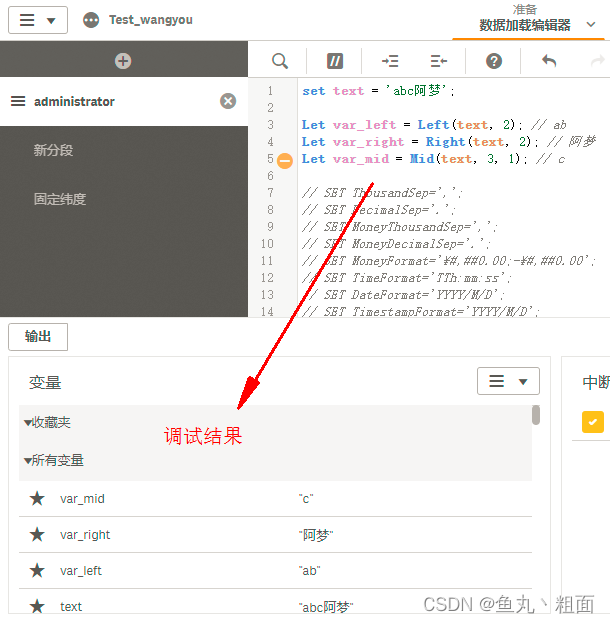
Qlik Sense 字符串截取和拼接详解(Left、Right、&)
Ansible installation and deployment detailed process, basic operation of configuration inventory

自监督论文阅读笔记SELF-SUPERVISED SPECTRAL MATCHING NETWORK FOR HYPERSPECTRAL TARGET DETECTION
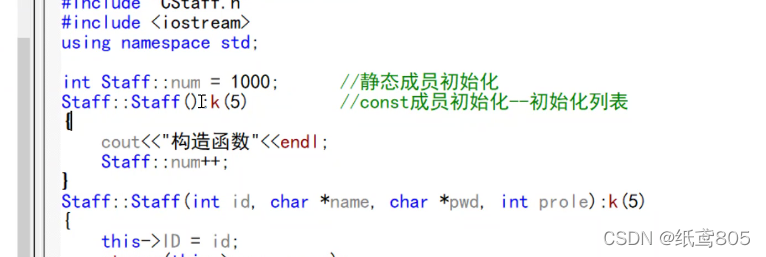
对象の使用
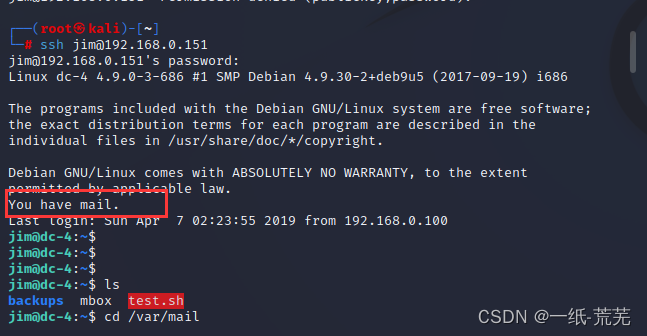
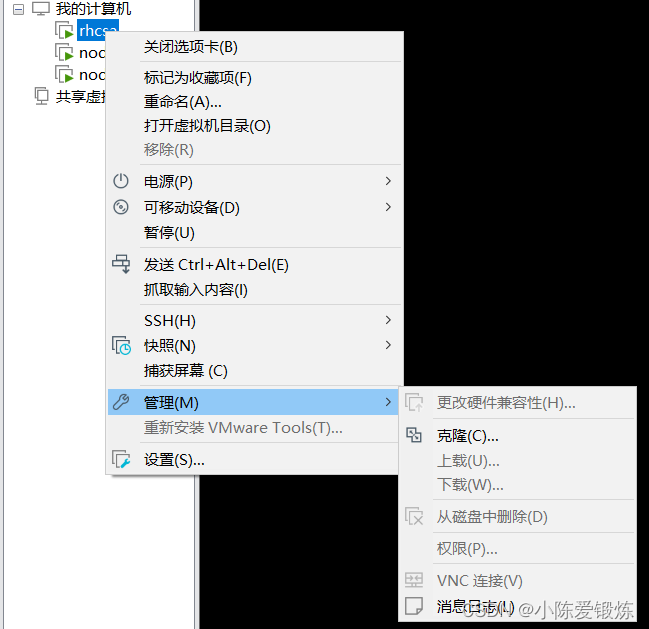
【DC-4 Range Penetration】
自监督论文阅读笔记Reading and Writing: Discriminative and Generative Modelingfor Self-Supervised Text Recogn
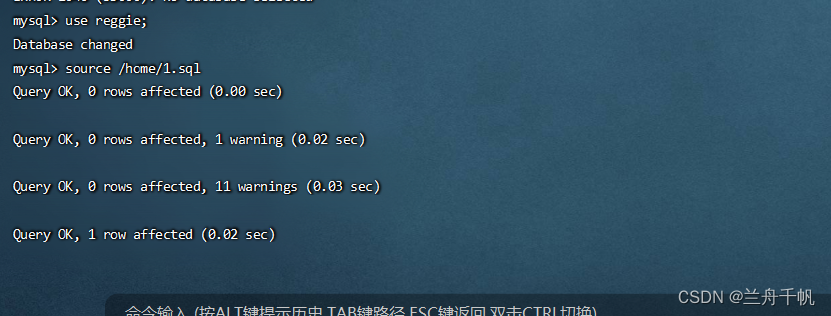
Execute the mysql script file in the docker mysql container and solve the garbled characters
MMU 介绍-[TBL/page table work]
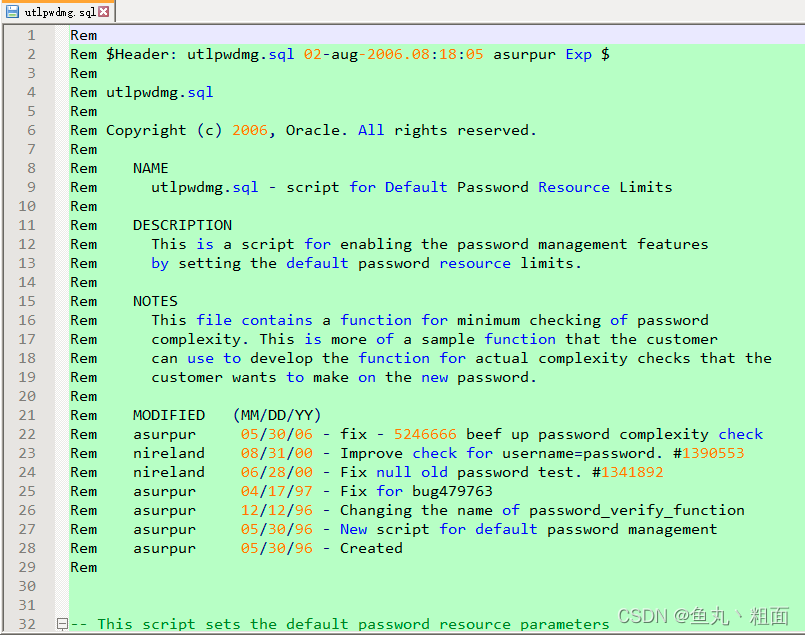
Oracle 注释详解(--、/**/、rem)
![MMU 介绍-[TBL/page table work]](/img/60/7c7126e68bd58b461a35e2b1e54914)
随机推荐
寄存器常见指令
cmdline -[command line,__fdt_pointer,initial_boot_params] boot_command_line 获取
嵌入式实验三(代码几乎都要改才能运行)
动漫 吞噬星空
【Yarn】yarn常用命令 查看日志和Kill任务
中国生活垃圾处理行业十四五规划与投融资模式分析报告2022~2028年
【HQL】(一)json字符串处理json_tuple和get_json_object
中国食品产业园区行业前景规划建议及投融资模式分析报告2022~2028年
Invalid signature file digest for Manifest main attributes解决方法
中国柔性制造系统(FMS)市场发展动态及未来趋势预测报告2022~2028年
损失函数(第五周)
二阶段提问总结
php连接数据库脚本
自监督论文阅读笔记 Self-supervised Label Augmentation via Input Transformations
中国石油行业并购重组趋势与投资战略规划建议报告2022~2028年
中国磷化铟技术行业发展趋势与前景规划建议报告2022~2028年
opencv透视变化
MySQL 安装报错的解决方法
opencv
ASP.NET MVC:自定义 Route