当前位置:网站首页>Compound nonlinear feedback control (2)
Compound nonlinear feedback control (2)
2022-07-04 05:45:00 【neuer】
Compound nonlinear feedback control ( Two )
The last article wrote CNF Design of fixed-point tracking control law of , Next, let's introduce CNF Design of trajectory tracking control law . The schematic diagram is shown in the figure below -1 Shown . Compared with fixed-point tracking CNF control , Trajectory tracking CNF Control of an additional signal generator structure , Because if the fixed-point tracking scheme is directly applied to the track tracking of curve signals , There will be obvious phase lag .

One 、 Design of compound nonlinear feedback trajectory tracking control law
This paper aims at the controlled object model described below :
There are several conventional assumptions , It is a typical requirement in general tracking control problems
(A,B) Composable (A,C) Can be detected (A,B,C) There is no invariant zero point in the right semi closed plane (A,E,C) stay s=0 Zero point changes everywhere d Is an unknown bounded constant ( Or piecewise constant ) Disturbance
First step : Define the signal generator , It can generate the desired target trajectory signal , And its corresponding internal state quantity :
Which output rg With the target track signal r(t) Match , The linear control rate of the design auxiliary system is ue,rs It's an exogenous signal , The state quantity xe(xe1,xe2 It is the position information and speed information of the target track ) And the linear control rate of the auxiliary system is ue We will use . Why is this design , Specify in the example .
The second step : Design linear feedback control law
Definition , as follows :
The feedback matrix here F Also meet A+BF It is gradually stable , take equ(1) and euq(6) Subtracting the , And the linear control law we designed uL Into the , We can get the following closed-loop system
Steady state , Tend to 0, Tends to be constant , From this, we can get the steady-state value of the state vector of the closed-loop system xs
It's worth noting that E It doesn't mean the identity matrix , It depends on disturbance and x1 About or with x2 of , It can be taken as E=[b;0] perhaps E=[0;b]. Despite the interference d etc. , The tracking error should still tend to 0 Tend to Tend to 0, So we can get fd The expression of
Sum up , Given a controlled system model A,B,C,D, We can first get from the signal generator xe and ue Information , Then choose the appropriate F, Thus, the disturbance feedforward gain is obtained fd, And the steady-state value of the closed-loop system xs, Thus we can express the linear control rate
The third step : Design nonlinear control rate
The nonlinear control rate is the same as the above fixed-point tracking CNF The design of nonlinear control rate is the same
Step four : Design extended state observer
The extended state observer does not need to be changed , The design is the same as that in fixed-point tracking
Two 、 Derivation proof of signal generator
Now let's talk about why the signal generator is designed as above .CNF The derivation of trajectory tracking control law can start with a simplified system model , Suppose a system model is as follows
The error signal of trajectory tracking is defined as
, Next, find the error dynamic equation of the system , , meanwhile e2 The derivative of must also be derived into e1 and e2 To expressDefinition , The error dynamic equation of the system can be written as follows
According to the above method , The designed compound nonlinear control rate is
among ,F Is the state feedback gain matrix , send (A+BF) Have stability Fixed eigenvalue , And the output response of the system is fast ;Fn Is the nonlinear feedback gain matrix . The parameterized form can also be deduced as follows
From the above definition, we can deduce u The expression of , Bring the observed value of the reduced order observer into , Available
fd It's an adjustable parameter , The value range is 0 to 1 Between . Will be derived u The expression of is similar to the trajectory tracking given above u We can know that the first purpose of adding the trajectory signal generator is to obtain the state quantity of the target signal , The second is to obtain the auxiliary control signal u~e~ , They are embedded into the composite nonlinear feedback control framework , To avoid CNF The phase lag problem of trajectory tracking . But if we want to track only a smooth and derivable sine curve , You can directly derive its position and speed , We just need to choose the appropriate feedback gain matrix Fe And exogenous signals rs To construct the u~e~ To the controller .
Here is a general solution to these two parameters , in the light of n Order can lead to the target trajectory signal , choice Fe bring A+BFe The eigenvalues of are 0; External signals , there N(s) It's a transfer function Molecular polynomials of . The initial value of sine cosine target signal can be taken as [0,0].
3、 ... and 、 Simulation example
We assume that the known system is
Convert to our above formula (1) State space form of ,A=[0,1;-51000,-90];B=[0;16000];C=[1,0]; hypothesis E=[0,16000], For example
We choose sinusoidal signal As the target track , Conduct simulink The simulation block diagram of the simulation is as follows , Assign poles at

CNF The controller programming adopts the parameterized form of the above derivation , The values of each parameter are as follows ,
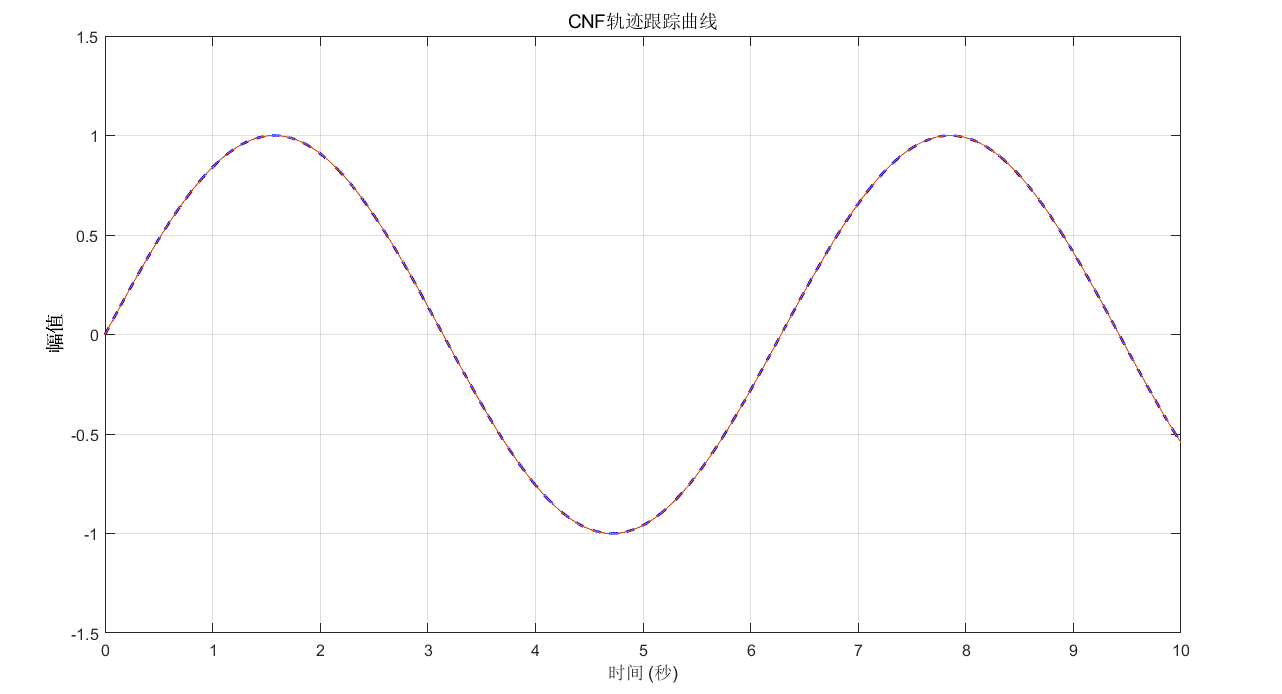
After parameter adjustment , The tracking error is 400nm about , Meet the requirements

Four 、 summary
The above is all about the design of compound nonlinear feedback control , To sum up, there are the following characteristics 1. Additional nonlinear control quantity uN Do not change the stability of the system 2. According to the system output y And reference signals r The distance between the dynamic adjustment system damping 3. Nonlinear control quantity uN And linear control quantity uL Partial offset 4. It can effectively reduce the overshoot of the system
Among them, the nonlinear control quantity uN And linear control quantity ul Partial offset can be seen from the figure below -5 See , Linear output and nonlinear output are in the same direction at the beginning , Then reverse .

[1],Improving_Transient_Performance_in_Tracking_General_References_Using_Composite_Nonlinear_Feedback_Control_and_Its_Application_to_High-Speed_XY-Table_Positioning_Mechanism
[2] Shi Min , Chengguoyang . Compound nonlinear trajectory tracking control based on adaptive friction compensation [J]. Motor and control applications ,2021,48(09):14-20.
边栏推荐
- left_ and_ right_ Net interpretable design
- How to determine whether an array contains an element
- JS how to convert seconds into hours, minutes and seconds display
- Programmers don't talk about morality, and use multithreading for Heisi's girlfriend
- gslb(global server load balance)技术的一点理解
- Principle and practice of common defects in RSA encryption application
- Unity2D--人物移动并转身
- [microservice] Nacos cluster building and loading file configuration
- 724. 寻找数组的中心下标
- Accidentally deleted the data file of Clickhouse, can it be restored?
猜你喜欢
Online shrimp music will be closed in January next year. Netizens call No

BeanFactoryPostProcessor 与 BeanPostProcessor 相关子类概述
每周小结(*63):关于正能量

VB. Net GIF (making and disassembling - optimizing code, class library - 5)

Evolution of system architecture: differences and connections between SOA and microservice architecture

(4) Canal multi instance use

ETCD数据库源码分析——初始化总览

光模块字母含义及参数简称大全

What are the reasons for the frequent high CPU of ECS?
![[high concurrency, high performance and high availability of massive data MySQL practice-7] - memory data drop disk](/img/b9/cf4db4f8a5d2ef3fb344258f0e30f5.jpg)
[high concurrency, high performance and high availability of massive data MySQL practice-7] - memory data drop disk
随机推荐
FreeRTOS 中 RISC-V-Qemu-virt_GCC 的 锁机制 分析
fastjson
安装 Pytorch geometric
光模塊字母含義及參數簡稱大全
Zhanrui tankbang | jointly build, cooperate and win-win zhanrui core ecology
How to use postman to realize simple interface Association [add, delete, modify and query]
Introduction To AMBA 简单理解
2022 R2 mobile pressure vessel filling retraining question bank and answers
Nodejs learning document
Kubernets first meeting
[high concurrency, high performance and high availability of massive data MySQL practice-7] - memory data drop disk
The difference between PX EM rem
Canoe panel learning video
px em rem的区别
Halcon image calibration enables subsequent image processing to become the same as the template image
LM small programmable controller software (based on CoDeSys) note 22: error 4268/4052
力扣(LeetCode)184. 部门工资最高的员工(2022.07.03)
win10清除快速访问-不留下痕迹
How to implement lazy loading in El select (with search function)
VB.net 调用FFmpeg简单处理视频(类库——6)