当前位置:网站首页>ROS文件系统以及相关命令
ROS文件系统以及相关命令
2022-08-02 07:16:00 【阿巴according】
第一级:catkin_workspace
第二级:src build devel
第三级(src目录下):package1 package2
第四级:CmakeLists.txt package.xml scripts msg srv include src launch
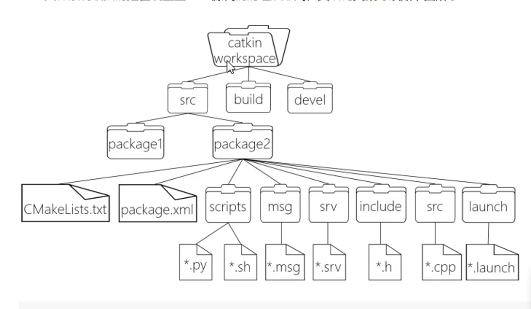
build:编译空间,用于存放CMake和catkin的缓存信息,配置信息和其他中间文件
devel:开发空间,用于存放编译后生成的目标文件,包含头文件,动态和静态链接库,可执行文件等等
src:源码空间
执行命令1 2 3
1、roscore
roscore 是ros系统先决条件节点和程序的集合,必须运行roscore才能使ROS节点进行通信
启动roscore相当于启动了 ros master ros 参数服务器 rosout 日志节点
2、rosrun
rosrun 工具包名 可执行文件
例如:rosrun turtlesim turtlesim_node
3、roslaunch
例如:roslaunch 工具包名 launch文件名
4、建
catkin_create_pkg 自定义包名 依赖包 -> 创建新的的ROS功能包
5、删
sudo apt purge xxx -> 删除某个功能包
6、查
rospack list ->列出所有的功能包
rospack find 包名 ->查询某个功能包是否存在,如果存在返回安装路径
roscd 包名 -> 进入某个包
rosls 包名 ->列出某个包下的文件
apt search xxx ->搜索某个功能包
7、改
rosed 包名 文件名 ->修改功能包文件
需要安装 vim
例如: rosed turtlesim Color.msg
边栏推荐
猜你喜欢
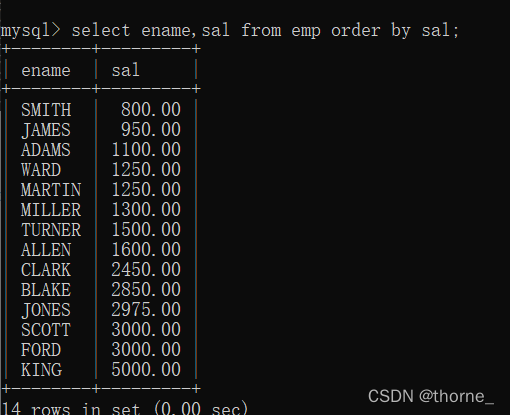
Introduction to mysql operation (4) ----- data sorting (ascending, descending, multi-field sorting)
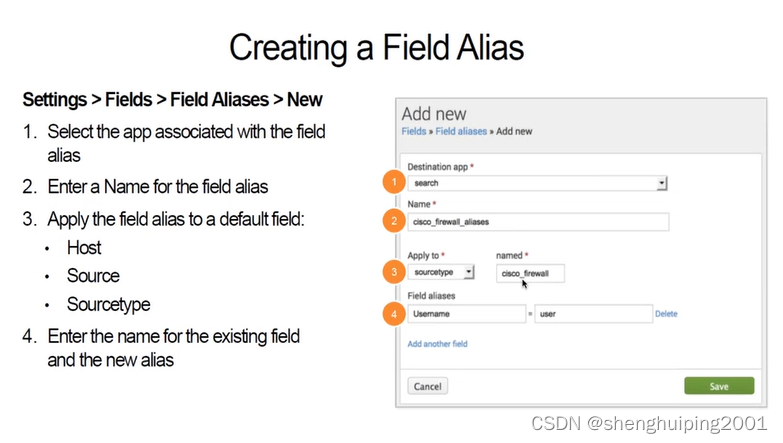
Splunk Filed Alias field name
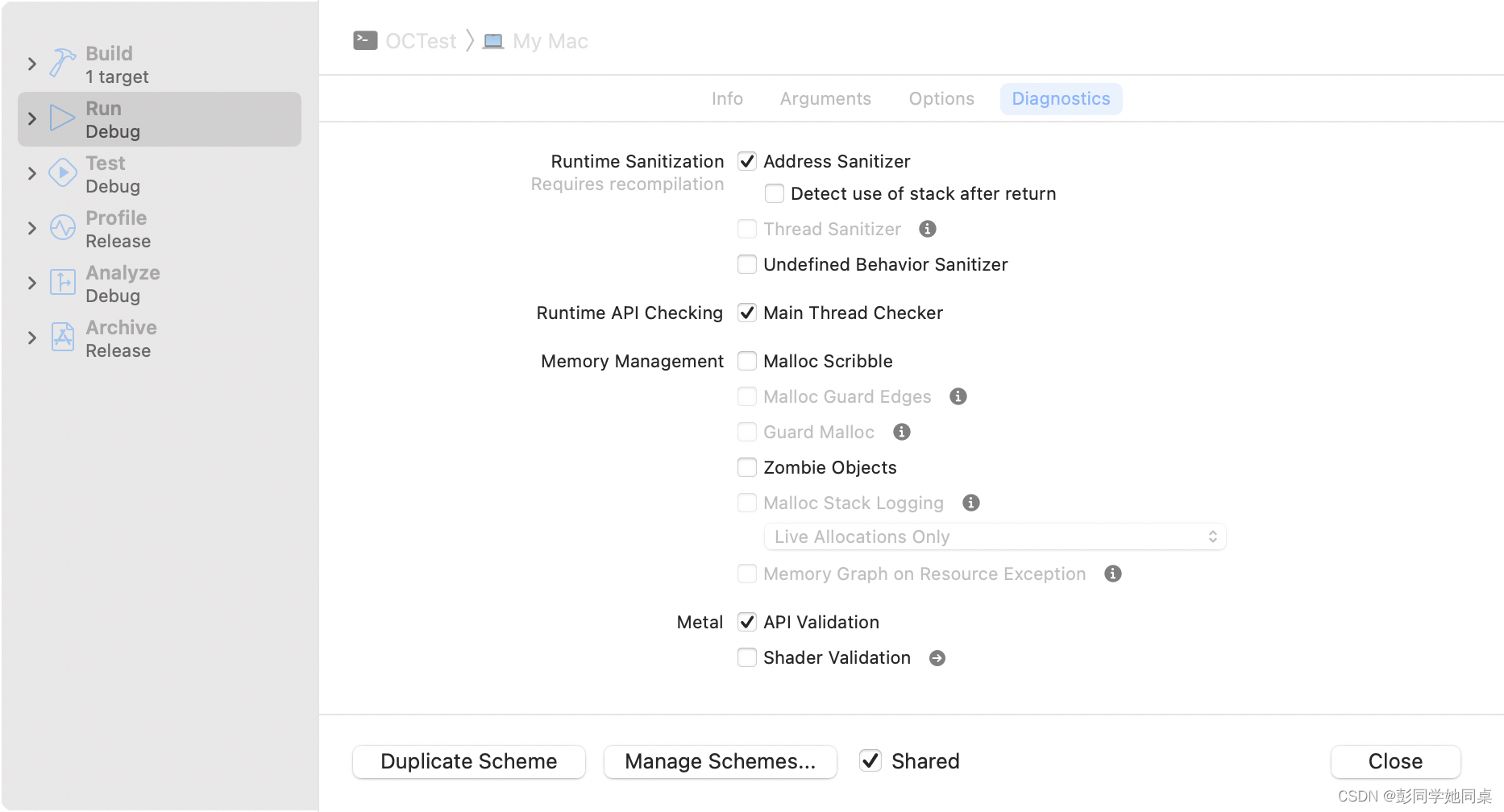
OC-error prompt

Compact格式下MySQL的数据如何存储到磁盘

FormData upload binary file, object, object array

停止精神内耗 每日分享

MySQL - based

自然语言处理 文本预处理(上)(分词、词性标注、命名实体识别等)
![MySQL报错1055解决办法:[Err] 1055 - Expression #1 of ORDER BY clause is not in GROUP BY clause and contains](/img/aa/ab58ec47bb96df803dbc6a8ff6dde3.png)
MySQL报错1055解决办法:[Err] 1055 - Expression #1 of ORDER BY clause is not in GROUP BY clause and contains

如何保护智能家居不受黑客攻击
随机推荐
MySQL error 1055 solution: [Err] 1055 - Expression #1 of ORDER BY clause is not in GROUP BY clause and contains
apt & apt-get commands
(2022牛客多校五)B-Watches(二分)
OC-范畴
研发创新编码器霍尔板,引领企业高质量发展
(2022 Niu Ke Duo School 5) B-Watches (two points)
pnpm + workspace + changesets 构建你的 monorepo 工程
FormData上传二进制文件、对象、对象数组
2022年防止网络攻击的15个网络安全实践,你学会了吗?
关于DDoS的几个误区
CSRF-Cross-site request forgery-related knowledge
FormData upload binary file, object, object array
Appium 滑动问题
MySQL - Index Optimization and Query Optimization
MySQL-慢查询日志
Probability Theory and Mathematical Statistics
OC-NSDictionary
MySQL-FlinkCDC-Hudi enters the lake in real time
OC-Category
spark read folder data