当前位置:网站首页>Slam mapping and autonomous navigation simulation based on turnlebot3
Slam mapping and autonomous navigation simulation based on turnlebot3
2022-07-03 11:38:00 【3D vision workshop】
Source: Gu Yueju
turtlebot3 brief introduction
TurtleBot3 It's a small , Low cost , Completely programmable , be based on ROS Mobile robot of . It is intended for education , Research , The purpose of product prototype and hobby Application .
TurtleBot3 Our goal is to significantly reduce the size and price of the platform , Without sacrificing performance , Function and quality . Because different options are provided , Such as chassis , Computers and sensors ,TurtleBot3 It can be customized in various ways .
install turtlebot3
sudo apt-get install ros-melodic-turtlebot3-*
// install gmapping Mapping algorithm dependency
apt-get install ros-melodic-gmapping
// install dwa Local path planning algorithm
apt-get install ros-melodic-dwa-local-plannerROS Different versions should be modified melodic
Keyboard control trolley movement
First, in the gazebo Start in the simulation environment turtlebot3 Car
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launchInstall keyboard control related dependencies
sudo apt-get install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-teleop-twist-keyboardRun the keyboard control node , Control the trolley according to the output prompt
rosrun teleop_twist_keyboard teleop_twist_keyboard.pyIf the installation appears [Err] [REST.cc:205] Error in REST request The following configuration is required :
sudo gedit ~/.ignition/fuel/config.yaml
Put... In the file https://api.ignitionfuel.org It is amended as follows https://api.ignitionrobotics.orgIf you start gazebo It has been unable to open , as a result of .gazebo Download models Incorrect library results in , The solution is to download all models directly to the user's root directory .gazebo/models/ Next

cd ~/.gazebo/
mkdir -p models
cd ~/.gazebo/models/
wget http://file.ncnynl.com/ros/gazebo_models.txt
wget -i gazebo_models.txt
ls model.tar.g* | xargs -n1 tar xzvfSLAM Building maps
Turn off all the above commands , Restart the following command
1、 Start the simulation environment
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_house.launch
2、 Turn on SLAM function , Selection of mapping algorithm gmapping
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping3、 Start keyboard control node , Control the trolley to rotate around the environment , Scan out a complete and closed map as much as possible
export TURTLEBOT3_MODEL=waffle_pi
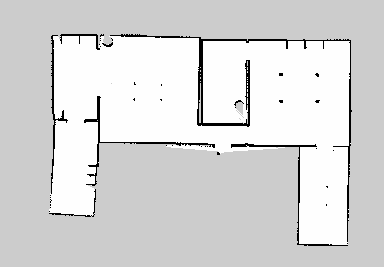
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch4、 Save the map
rosrun map_server map_saver -f ~/mapThis is the map I swept out after running around the car
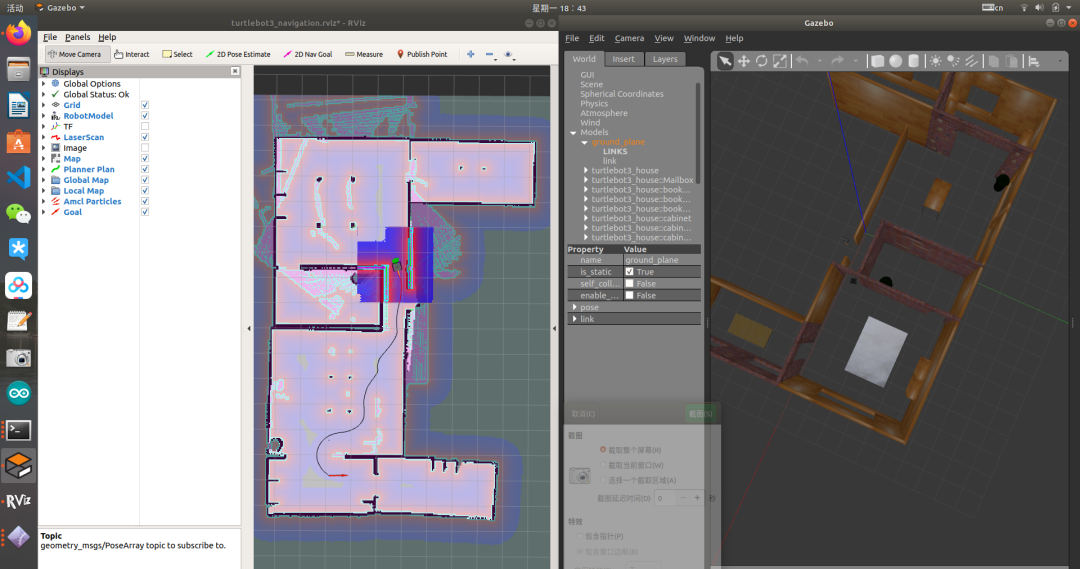
Autonomous Navigation
Realized renderings :
1、 First load the saved map
rosrun map_server map_server map.yaml2、 Open the simulation environment , Use visualization tools rviz Show it
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_gazebo turtlebot3_house.launch3、 Turn on the autonomous navigation function
export TURTLEBOT3_MODEL=waffle_pi
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/kaijun/map.yamlGood configuration rviz, Use 2D Pose Estimate Set the starting point of the car , Reuse 2D Nav Goal Set the target location of the car , The car will plan the path , Automatically run to the target location , Realize autonomous navigation function .

This article is only for academic sharing , If there is any infringement , Please contact to delete .
3D Visual workshop boutique course official website :3dcver.com
1. Multi sensor data fusion technology for automatic driving field
2. For the field of automatic driving 3D Whole stack learning route of point cloud target detection !( Single mode + Multimodal / data + Code )
3. Thoroughly understand the visual three-dimensional reconstruction : Principle analysis 、 Code explanation 、 Optimization and improvement
4. China's first point cloud processing course for industrial practice
5. laser - Vision -IMU-GPS The fusion SLAM Algorithm sorting and code explanation
6. Thoroughly understand the vision - inertia SLAM: be based on VINS-Fusion The class officially started
7. Thoroughly understand based on LOAM Framework of the 3D laser SLAM: Source code analysis to algorithm optimization
8. Thorough analysis of indoor 、 Outdoor laser SLAM Key algorithm principle 、 Code and actual combat (cartographer+LOAM +LIO-SAM)
10. Monocular depth estimation method : Algorithm sorting and code implementation
11. Deployment of deep learning model in autopilot
12. Camera model and calibration ( Monocular + Binocular + fisheye )
13. blockbuster ! Four rotor aircraft : Algorithm and practice
14.ROS2 From entry to mastery : Theory and practice
15. The first one in China 3D Defect detection tutorial : theory 、 Source code and actual combat
blockbuster !3DCVer- Academic paper writing contribution Communication group Established
Scan the code to add a little assistant wechat , can Apply to join 3D Visual workshop - Academic paper writing and contribution WeChat ac group , The purpose is to communicate with each other 、 Top issue 、SCI、EI And so on .
meanwhile You can also apply to join our subdivided direction communication group , At present, there are mainly 3D Vision 、CV& Deep learning 、SLAM、 Three dimensional reconstruction 、 Point cloud post processing 、 Autopilot 、 Multi-sensor fusion 、CV introduction 、 Three dimensional measurement 、VR/AR、3D Face recognition 、 Medical imaging 、 defect detection 、 Pedestrian recognition 、 Target tracking 、 Visual products landing 、 The visual contest 、 License plate recognition 、 Hardware selection 、 Academic exchange 、 Job exchange 、ORB-SLAM Series source code exchange 、 Depth estimation Wait for wechat group .
Be sure to note : Research direction + School / company + nickname , for example :”3D Vision + Shanghai Jiaotong University + quietly “. Please note... According to the format , Can be quickly passed and invited into the group . Original contribution Please also contact .

▲ Long press and add wechat group or contribute
▲ The official account of long click attention
3D Vision goes from entry to mastery of knowledge : in the light of 3D In the field of vision Video Course cheng ( 3D reconstruction series 、 3D point cloud series 、 Structured light series 、 Hand eye calibration 、 Camera calibration 、 laser / Vision SLAM、 Automatically Driving, etc )、 Summary of knowledge points 、 Introduction advanced learning route 、 newest paper Share 、 Question answer Carry out deep cultivation in five aspects , There are also algorithm engineers from various large factories to provide technical guidance . meanwhile , The planet will be jointly released by well-known enterprises 3D Vision related algorithm development positions and project docking information , Create a set of technology and employment as one of the iron fans gathering area , near 4000 Planet members create better AI The world is making progress together , Knowledge planet portal :
Study 3D Visual core technology , Scan to see the introduction ,3 Unconditional refund within days
There are high quality tutorial materials in the circle 、 Answer questions and solve doubts 、 Help you solve problems efficiently
Feel useful , Please give me a compliment ~
边栏推荐
- C语言 AES加解密
- 基于turtlebot3实现SLAM建图及自主导航仿真
- 机器学习 3.2 决策树模型 学习笔记(待补)
- Phpcms prompt message page Jump to showmessage
- Viewing binary bin files with notepad++ editor
- [VTK] vtkWindowedSincPolyDataFilter 源码注释解读
- How to make others fear you
- Application of high-precision indoor positioning technology in safety management of smart factory
- How PHP solves the problem of high concurrency
- Reading notes: heart like Bodhi, Cao Dewang
猜你喜欢
The world's most popular font editor FontCreator tool
2022 东北四省赛 VP记录/补题

Multi dimensional monitoring: the data base of intelligent monitoring
Viewing binary bin files with notepad++ editor

After a month, I finally got Kingdee offer! Share tetrahedral Sutra + review materials

Numpy np. Max and np Maximum implements the relu function
Google Earth engine (GEE) - ghsl global population grid dataset 250 meter resolution
Event preview | the live broadcast industry "rolled in" to drive new data growth points with product power
金额计算用 BigDecimal 就万无一失了?看看这五个坑吧~~

Web安全总结
随机推荐
Programmers' entrepreneurial trap: taking private jobs
如何成为一名高级数字 IC 设计工程师(1-3)Verilog 编码语法篇:Verilog 行为级、寄存器传输级、门级(抽象级别)
PHP基础
Nestjs配置服务,配置Cookie和Session
Solve undefined reference to`__ aeabi_ Uidivmod 'and undefined reference to`__ aeabi_ Uidiv 'error
Analysis of EPS electric steering system
How PHP solves the problem of high concurrency
Excel快速跨表复制粘贴
Understand go language context in one article
Double linked list of linear list
JGG专刊征稿:时空组学
Kubernetes 三打探针及探针方式
Gut | Yu Jun group of the Chinese University of Hong Kong revealed that smoking changes intestinal flora and promotes colorectal cancer (do not smoke)
Modular programming of single chip microcomputer
After setting up ADG, instance 2 cannot start ora-29760: instance_ number parameter not specified
Illustrated network: what is virtual router redundancy protocol VRRP?
asyncio 警告 DeprecationWarning: There is no current event loop
活动预告 | 直播行业“内卷”,以产品力拉动新的数据增长点
Kibana~Kibana的安装和配置
Xml的(DTD,xml解析,xml建模)